MIMO-SAR圖像的成像機(jī)理及其在變跡濾波方法下的旁瓣抑制策略
2018-04-03 01:17:16陳向東鄧江洪安國(guó)成
東北師大學(xué)報(bào)(自然科學(xué)版) 2018年1期
關(guān)鍵詞:方法
陳向東,鄧江洪,安國(guó)成
(1.黃淮學(xué)院動(dòng)畫學(xué)院,河南 駐馬店 463000; 2.北京國(guó)鐵華晨通信技術(shù)有限公司,北京 100070)
多給入、給出雷達(dá)系統(tǒng)(Multi-Input Multi-Output MIMO)[1]能夠延展陣列孔洞,提升雷達(dá)裝置的自由程度,受到國(guó)內(nèi)外的研究人員的重視.將MIMO雷達(dá)體系和SAR成像策略綜合,不僅能夠沖破現(xiàn)有的SAR體系的局限性,而且拓展了新的和雷達(dá)裝置相適應(yīng)的MIMO-SAR成像體系.
文獻(xiàn)[2]采用旋轉(zhuǎn)目的方向分辨策略構(gòu)建MIMO分布模式的MIMO-SAR成像體系,提升了SAR成像裝置的分辨效率;文獻(xiàn)[3]把MIMO雷達(dá)策略和SAR成像體系從相同方向分辨率的角度處理現(xiàn)有SAR成像體系的發(fā)送和接受天線數(shù)量,提升了MIMO雷達(dá)裝置對(duì)于非理想運(yùn)動(dòng)目標(biāo)的適應(yīng)特性;文獻(xiàn)[4]采用分布化多級(jí)快拍策略完成目標(biāo)的SAR成像,能夠得到多方向的單路快拍觀測(cè)信息,和MIMO雷達(dá)體系結(jié)合后有效提升雷達(dá)裝置的目標(biāo)定位效能;文獻(xiàn)[5]把MIMO雷達(dá)體系和三維SAR成像系統(tǒng)結(jié)合,能夠提升目標(biāo)的識(shí)別度和成像距離的分辨效率.
正交旁瓣技術(shù)在雷達(dá)技術(shù)研究領(lǐng)域通常是在合成孔徑雷達(dá)裝置的基礎(chǔ)上搭建的.由于SAR策略的距離和方向之間的二維頻域區(qū)間存在局限性,因而在兩個(gè)方向上都可以響應(yīng)Sinc解析式,該狀況目標(biāo)部分的旁瓣作用易使目標(biāo)部分發(fā)生轉(zhuǎn)變,進(jìn)而影響SAR體系中弱目標(biāo)部分的校驗(yàn)?zāi)芰Γ筍AR圖像的質(zhì)量下降,因而旁瓣抑制策略[6]對(duì)于提升MIMO-SAR成像體系的效能具有較好的作用.本文結(jié)合現(xiàn)有的MIMO-SAR成像體系有效抑制正交旁瓣作用的方法,綜合空間變軌跡濾波模式和多級(jí)濾波方式的適應(yīng)標(biāo)準(zhǔn)進(jìn)行分析,并且給出兩類能夠完成變軌跡濾波的方法.
1 MIMO-SAR成像機(jī)理
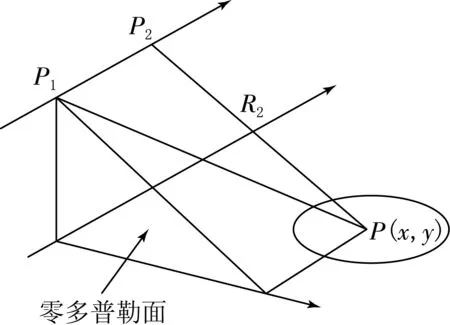
圖1 MIMO-SAR成像信息獲取的幾何結(jié)構(gòu)
假定MIMO-SAR雷達(dá)的機(jī)載模塊以速率vs做勻速運(yùn)動(dòng),P為雷達(dá)輻射波涵蓋區(qū)間的目標(biāo)點(diǎn),R(η)為η時(shí)刻雷達(dá)裝置在P1方位下的P(x0,y0)的瞬時(shí)距離,多普勒平面為一個(gè)和機(jī)載部分垂直的水平面,P2為MIMO-SAR雷達(dá)裝置和目標(biāo)最近的點(diǎn),并且將該時(shí)間設(shè)定為參照時(shí)間,該值為零也叫做零多普勒時(shí)段[7].MIMO-SAR雷達(dá)的回波信息的數(shù)學(xué)解析模式見圖1.按照?qǐng)D1的數(shù)學(xué)模型,R(η)表述為
(1)
MIMO-SAR雷達(dá)的線性調(diào)制脈沖[8]為
s(τ)=A0rect(τ/Tp)cos(2πf0τ+πKττ2).
(2)
其中:τ為間距時(shí)間;A0為信號(hào)的幅度;f0為載波的頻率;Kr為距離向脈沖的調(diào)制頻率;Tp為脈沖的寬度.
2 MIMO-SAR圖像旁瓣原理解析
MIMO-SAR雷達(dá)對(duì)應(yīng)的自相關(guān)解析式峰值降低到3 dB時(shí)將τw作為主旁瓣的寬度,其旁瓣相應(yīng)的時(shí)間延遲參量為Γ=[-τw/2,τw/2],其中第i個(gè)數(shù)據(jù)自相關(guān)解析式的峰值旁瓣比例和積分旁瓣[9]比例公式為:
Pp(si)=max{A0(τ/Tp)};
(3)
(4)
現(xiàn)有的MIMO雷達(dá)裝置常采用點(diǎn)目標(biāo)處理.為了避免產(chǎn)生強(qiáng)散射模式下的旁瓣抑制相鄰弱目標(biāo)的狀況,需要得到較小的Pp(si),此外,由于MIMO-SAR的成像包含在對(duì)地測(cè)試的范圍之內(nèi),因而回波參量為地面中的散射部分的回波數(shù)據(jù)的疊加值,若整個(gè)PI(si)較高,則散射區(qū)間的帶寬較好.MIMO-SAR陣列的空間模糊解析式的旁瓣參量見圖2.

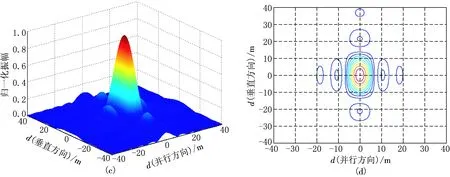
圖2 MIMO-SAR帶寬以及合成的孔徑
3 變跡濾波模式下的旁瓣抑制策略
3.1 間距從SVA和方位向三變跡濾波操作
MIMO-SAR雷達(dá)在升余弦窗體[10]的基礎(chǔ)下,選取汗寧窗體、海默窗體及頻域窗體構(gòu)建加權(quán)配準(zhǔn)方法,測(cè)算汗寧窗體、海默窗體和頻域窗體加權(quán)后的序列.[11]
汗寧窗體的解析模型為
(5)
通過汗寧窗體的加權(quán)操作之后,脈沖響應(yīng)的主旁瓣和副旁瓣的比值是28 dB.此外,該方法所得主瓣的寬度值是現(xiàn)有Sinc脈沖寬度[12]的2倍.
海默窗體模型為
(6)
通過海默窗體操作之后,首個(gè)旁瓣得到抑制,主副旁瓣的比例高達(dá)45 dB,其寬度結(jié)果遠(yuǎn)小于海寧窗體.
頻域窗體的模型為
A(k)=?k,0+w(?k,-1+?k,1).
(7)
本文將SAR圖像的現(xiàn)有像素和鄰接像素進(jìn)行對(duì)比,設(shè)定加權(quán)參量,該方法盡可能保存主瓣,并在一定程度上抑制旁瓣.和文獻(xiàn)[7]方法對(duì)比結(jié)果見圖3.
3.2 二維分離模式的SVA處理方法
設(shè)定M(n)為SAR圖像的實(shí)數(shù)部分圖像,采用頻域窗體完成M(n)的濾波操作,并給定參量w(n)處理濾波之后的圖像|M*(n)|,其值為
|M*(n)|=M(n)+w(n)[M(n-1)+M(n+1)].
(8)
通過大量實(shí)驗(yàn)得到w(n)的最優(yōu)取值為0.5,使得該部分的采樣點(diǎn)得到抑制,并且減弱了旁瓣部分對(duì)主瓣部分的擾動(dòng).對(duì)二維分離模式的SVA結(jié)果完成傅氏變換,使得初始相位的像素進(jìn)行正負(fù)轉(zhuǎn)換,得到的實(shí)驗(yàn)結(jié)果見圖4.

圖3 本文方法和文獻(xiàn)[7]方法響應(yīng)對(duì)比結(jié)果
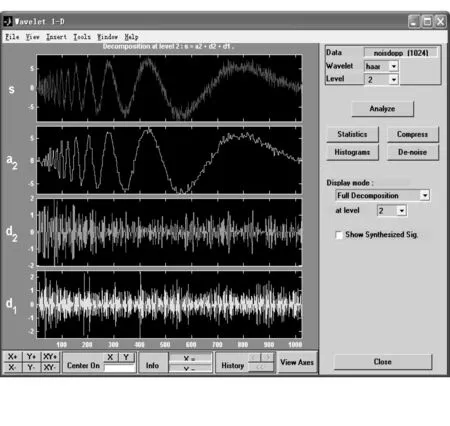
圖4 初始幅值和相位以及二維分離模式SVA處理得到的圖像幅值和相位
4 結(jié)果測(cè)試和解析
4.1 仿真結(jié)果測(cè)試
為驗(yàn)證本文方法的可行性,選取實(shí)驗(yàn)室搭建的方形目標(biāo)信息分析塊,設(shè)定的頻率范圍為10~15 Hz,給定的帶寬為10 MHz,并給出850個(gè)頻率點(diǎn).給出原始圖像、汗寧加窗圖像、海默加窗圖像、頻域加窗圖像、三變跡濾波圖像和二維分離模式的SVA處理圖像(見圖5).幅值結(jié)果和相位結(jié)果的數(shù)學(xué)模型見圖6.
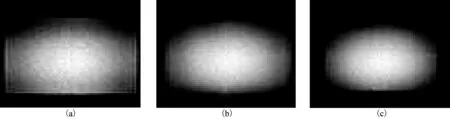
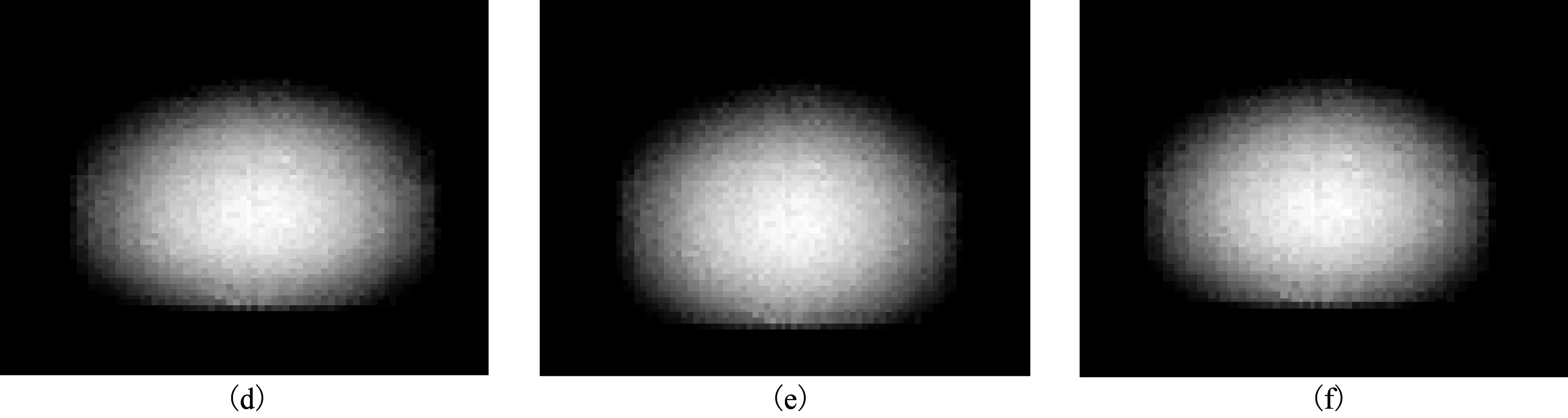
a:原始圖像;b:汗寧加窗圖像;c:海默加窗圖像;d:頻域加窗圖像;e:三變跡濾波圖像;f:二維分離模式的SVA處理圖像
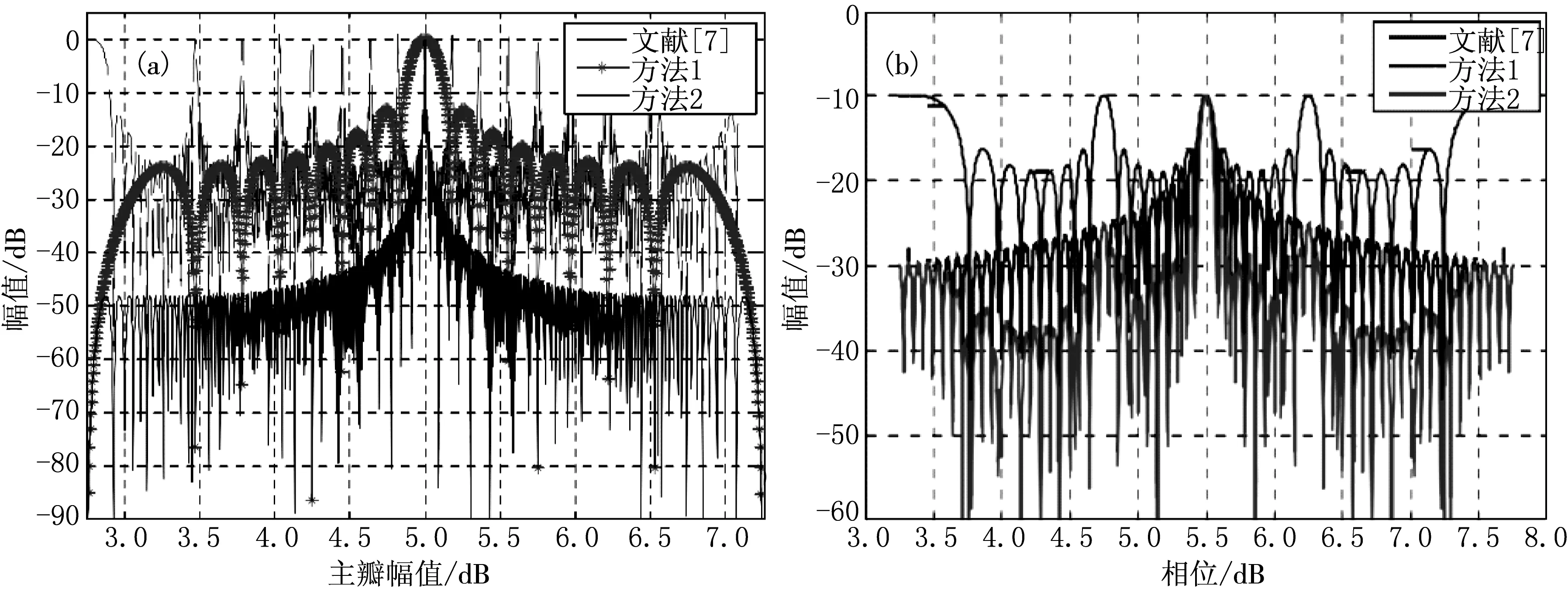
a:主瓣幅值結(jié)果;b:相位結(jié)果
圖6和表1給出方法1的幅值結(jié)果主瓣帶寬比文獻(xiàn)[7]方法小10 dB左右,方法2的幅值結(jié)果主瓣帶寬比文獻(xiàn)[7]方法小20 dB左右.表2給出文獻(xiàn)[7]方法的相位結(jié)果則介于方法1和方法2之間.文獻(xiàn)[7]方法雖能夠有效抑制旁瓣,但在幅值一側(cè)上的主瓣頻率變化較大,而本文2種方法主瓣頻率變化較小,且旁瓣得到有效抑制.

表1 方形目標(biāo)信息分析塊處理的主瓣幅值 dB

表2 方形目標(biāo)信息分析塊處理的相位結(jié)果 dB
4.2 仿真結(jié)果解析
從圖6中能夠得到文獻(xiàn)[7]方法的幅值和相位結(jié)果分布不規(guī)則,呈現(xiàn)散雜排布的條紋狀特點(diǎn),本文方法的幅值和相位結(jié)果分布均勻,表明本文方法的加權(quán)參量伴隨主副瓣部分的改變而改變,因而能夠保留主瓣的寬度結(jié)果,并且起到抑制旁瓣作用.
[參考文獻(xiàn)]
[1]MOREIRA A,PRATS P,YOUNIS M,et al.A tutorial on synthetic aperture radar[J].IEEE Geoscience and Remote Sensing Magazine,2013,1(1):6-43.
[2]WANG W.Large-area remote sensing in high-altitude high speed platform using MIMO SAR[J].IEEE Journal of selected Topics in Applied earth Observations and Remote Sensing,2013,9(2):15-35.
[3]XIAODONG ZHUGE,ALEXANDER G YAROVOY.A sparse aperture MIMO-SAR-based UWB imaging system for concealed weapon detection[J].IEEE Trans On Geoscience and Remote Sensing,2011,36(7):98-106.
[4]MADHU S,NAIR,REKHA L,et al.Fuzzy logic-based automatic contrast enhancement of satellite images of ocean[J].Signal Image & Video Processing,2011,5(1):69-80.
[5]李升遠(yuǎn).采用OFDM-LFM的MIMO雷達(dá)高速目標(biāo)波形設(shè)計(jì)[J].西安電子科技大學(xué)學(xué)報(bào),2018,45(3):8-13.
[6]張晗,李禹.最小模糊偏移度準(zhǔn)則下的SAR圖像對(duì)比度增強(qiáng)[J].計(jì)算機(jī)工程與應(yīng)用,2012,48(25):174-179.
[7]張晗.SAR圖像質(zhì)量評(píng)估方法研究[D].長(zhǎng)沙:國(guó)防科技大學(xué),2012.
[8]涂坤,李禹,張晗.自適應(yīng)越渡點(diǎn)的SAR圖像模糊對(duì)比度增強(qiáng)算法[J].計(jì)算機(jī)工程與應(yīng)用,2013,49(21):128-132.
[9]鄧云凱,趙鳳軍,王宇.星載SAR技術(shù)的發(fā)展趨勢(shì)及應(yīng)用淺析[J].雷達(dá)學(xué)報(bào),2012,1(1):1-10.
[10]趙雨,林曉佳,陽維,等.基于加權(quán)紅-黑小波變換的DR圖像增強(qiáng)[J].暨南大學(xué)學(xué)報(bào)(自然科學(xué)與醫(yī)學(xué)版),2015,36(3):191-201.
[11]譚學(xué)功.基于補(bǔ)償模式的非合作自組織網(wǎng)絡(luò)任播路由[J].暨南大學(xué)學(xué)報(bào)(自然科學(xué)與醫(yī)學(xué)版),2014,35(1):77-81.
[12]賈遂民,王韞華,肖漢.類似虹膜輪廓曲線分割的SAR雷達(dá)成像技術(shù)[J].微電子學(xué)與計(jì)算機(jī),2014,31(9):126-130.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
