雷達(dá)/紅外/激光復(fù)合制導(dǎo)信息融合技術(shù)
2018-04-09 07:45:48李時(shí)光李嬋劉崢
航空兵器 2018年1期
李時(shí)光 李嬋 劉崢


摘 要:????? 多模復(fù)合制導(dǎo)武器在現(xiàn)代戰(zhàn)爭(zhēng)中的作用越來(lái)越重要。 以雷達(dá)/紅外/激光三模復(fù)合導(dǎo)引頭為應(yīng)用背景, 設(shè)計(jì)了一種分布式、 特征級(jí)信息融合方案。 該方案重點(diǎn)研究了協(xié)同抗干擾和多特征融合識(shí)別等關(guān)鍵技術(shù), 并在專用數(shù)字仿真測(cè)試平臺(tái)中進(jìn)行了性能驗(yàn)證。? 結(jié)果表明, 該方案可有效提高導(dǎo)引頭在復(fù)雜干擾背景下的抗干擾性能和目標(biāo)鑒別能力。
關(guān)鍵詞:???? 多模復(fù)合制導(dǎo);?? 抗干擾;??? 目標(biāo)鑒別;?? 測(cè)試平臺(tái)
中圖分類號(hào):??? TJ765.3? 文獻(xiàn)標(biāo)識(shí)碼:??? A? 文章編號(hào):???? 1673-5048(2018)01-0033-06
0 引? 言
在由毫米波雷達(dá)/紅外成像/激光半主動(dòng)探測(cè)器構(gòu)成的三模復(fù)合導(dǎo)引頭系統(tǒng)中, 雷達(dá)導(dǎo)引頭作用距離遠(yuǎn), 采集的目標(biāo)位置信息(包括距離和角度等信息)全面, 可以全天時(shí)、 全天候工作, 但容易受到偵察干擾且測(cè)量精度較低;?? 紅外導(dǎo)引頭雖然只能測(cè)角或角速度, 但其測(cè)量精度高, 且紅外圖像可以刻畫(huà)出目標(biāo)的幾何特征信息, 對(duì)于鑒別目標(biāo)身份具有很大優(yōu)勢(shì), 再加上其為被動(dòng)觀測(cè), 所以具有較強(qiáng)的抗電子干擾能力[1];? 半主動(dòng)激光導(dǎo)引頭作用距離相對(duì)較遠(yuǎn), 可測(cè)距、 測(cè)角且角分辨率高[2], 但其受天氣影響較大, 且易受到煙幕干擾。 利用這三種探測(cè)器各自的優(yōu)點(diǎn)進(jìn)行組合探測(cè)與跟蹤, 一方面可對(duì)所接收的三組關(guān)于目標(biāo)的運(yùn)動(dòng)狀態(tài)信息進(jìn)行融合, 提高跟蹤精度;? 另一方面通過(guò)航跡關(guān)聯(lián)與目標(biāo)鑒別可以進(jìn)行干擾判別, 從而提高復(fù)合制導(dǎo)系統(tǒng)的整體抗干擾性能和目標(biāo)鑒別性能[3]。
本文針對(duì)毫米波雷達(dá)/紅外成像/激光半主動(dòng)三模復(fù)合導(dǎo)引頭, 給出了復(fù)合導(dǎo)引頭信息融合處理總體技術(shù)方案和關(guān)鍵技術(shù)說(shuō)明, 可為毫米波雷達(dá)/紅外成像/激光半主動(dòng)復(fù)合導(dǎo)引頭的工程化應(yīng)用提供理論技術(shù)參考。
1 總體方案設(shè)計(jì)
1.1 復(fù)合導(dǎo)引頭的結(jié)構(gòu)
多模復(fù)合導(dǎo)引頭在結(jié)構(gòu)復(fù)合方式上主要有分口徑和共口徑兩種方式, 共口徑相對(duì)于分口徑在結(jié)構(gòu)上具有體積小、 質(zhì)量輕等優(yōu)勢(shì), 同時(shí)還可以實(shí)現(xiàn)多個(gè)傳感器數(shù)據(jù)的精確配準(zhǔn), 為復(fù)合信息處理減小誤差[4]。 在本方案中, 毫米波雷達(dá)/紅外成像/激光半主動(dòng)三模導(dǎo)引頭的集能器采用共口徑結(jié)構(gòu)復(fù)合方式, 對(duì)觀測(cè)場(chǎng)景的搜索與目標(biāo)跟蹤均在同一個(gè)伺服控制平臺(tái)上完成。
1.2 復(fù)合導(dǎo)引頭信息融合方案
針對(duì)前述共口徑結(jié)構(gòu)復(fù)合導(dǎo)引頭, 本文給出了分布式、 特征級(jí)信息融合方案, 見(jiàn)圖1。
分布式融合是對(duì)目標(biāo)位置信息的融合處理, 其過(guò)程是由各探測(cè)器完成單探測(cè)器的多目標(biāo)跟蹤與狀態(tài)估計(jì), 把獲得的目標(biāo)航跡信息送入融合中心。 融合中心完成時(shí)間對(duì)準(zhǔn)、 坐標(biāo)變換, 然后基于這些探測(cè)器的目標(biāo)狀態(tài)估計(jì)進(jìn)行航跡關(guān)聯(lián)處理,? 最后對(duì)來(lái)自同一目標(biāo)的航跡估計(jì)進(jìn)行航跡融合。 與集中式融合處理方式相比, 分布式融合的優(yōu)點(diǎn)是可以以較低的費(fèi)用獲得較高的可靠性和可用性[5]。
特征級(jí)融合是對(duì)目標(biāo)屬性信息的融合處理, 以實(shí)現(xiàn)目標(biāo)身份的確認(rèn)。 按照所處理對(duì)象的數(shù)據(jù)類型不同, 目標(biāo)屬性融合分為數(shù)據(jù)級(jí)融合、 特征級(jí)融合和決策級(jí)融合。 其中特征級(jí)融合和決策級(jí)融合可以進(jìn)行異類探測(cè)器間的信息融合。 本方案采用特征級(jí)融合, 與數(shù)據(jù)級(jí)融合相比, 其實(shí)現(xiàn)了信息壓縮, 有利于實(shí)時(shí)處理;? 與決策級(jí)融合相比, 則多保留了目標(biāo)的信息, 減少了信息損失[6]。
由圖1可知, 分布式、 特征級(jí)信息融合方案中, 信息融合處理單元包括兩個(gè)部分: 局部探測(cè)器目標(biāo)跟蹤濾波處理和信息融合中心處理。 與常規(guī)分布式結(jié)構(gòu)相比, 不同之處是將局部探測(cè)器目標(biāo)跟蹤移至信息融合處理單元進(jìn)行處理, 這樣調(diào)整可以使整個(gè)信息融合處理單元掌握更多的目標(biāo)狀態(tài)信息, 使處理更加靈活。
雷達(dá)、 紅外、 激光前端首先完成目標(biāo)檢測(cè)、 參數(shù)估計(jì)等步驟, 形成各自目標(biāo)的狀態(tài)觀測(cè)信息(目標(biāo)點(diǎn)跡)。 然后, 局部跟蹤器再分別對(duì)各自前端探測(cè)的目標(biāo)點(diǎn)跡進(jìn)行濾波估計(jì), 產(chǎn)生穩(wěn)定的目標(biāo)跟蹤局部航跡信息。
信息融合中心處理的對(duì)象為局部航跡和各航跡所攜帶的目標(biāo)屬性特征信息。 具體工作步驟為時(shí)空配準(zhǔn)、 航跡關(guān)聯(lián)、 特征融合和航跡融合。 其中, 多探測(cè)器數(shù)據(jù)層協(xié)同抗干擾功能在航跡關(guān)聯(lián)環(huán)節(jié)實(shí)現(xiàn), 多特征融合識(shí)別在特征融合環(huán)節(jié)實(shí)現(xiàn)。
2 協(xié)同抗干擾技術(shù)
多模復(fù)合導(dǎo)引頭在復(fù)雜干擾背景下工作時(shí), 需要采取合適的信息融合策略, 以確定采用何種航跡信息對(duì)最終輸出的系統(tǒng)航跡進(jìn)行更新, 進(jìn)而引導(dǎo)導(dǎo)彈飛行。 本方案中, 航跡信息包括雷達(dá)航跡、 紅外航跡、 激光航跡以及系統(tǒng)航跡。
復(fù)合導(dǎo)引頭的三個(gè)探測(cè)器在完成制導(dǎo)任務(wù)過(guò)程中工作狀態(tài)分為正常和故障(受干擾)兩種狀態(tài)。 在“航跡關(guān)聯(lián)”環(huán)節(jié)中, 當(dāng)某一探測(cè)器航跡不能與其他探測(cè)器航跡關(guān)聯(lián)成功時(shí), 可以判斷該探測(cè)器受到干擾。
本方案假設(shè)雷達(dá)探測(cè)器輸出2條航跡(R1和R2), 紅外探測(cè)器輸出2條航跡(H1和H2), 激光探測(cè)器輸出1條航跡(L)。 分別將每個(gè)探測(cè)器的航跡與其他兩個(gè)探測(cè)器的航跡進(jìn)行兩兩關(guān)聯(lián), 得到8組關(guān)聯(lián)對(duì), 將其分為三組, 然后判斷每組是否有關(guān)聯(lián)成功的關(guān)聯(lián)對(duì), 若有則輸出“1”, 沒(méi)有則輸出“0”。 這樣就可以得到8種狀態(tài), 分別用“000”、 “001”、 “010”、 “100”、 “011”、 “101”、 “110”和“111”表示。 每種狀態(tài)下, 航跡關(guān)聯(lián)的輸出結(jié)果如下:
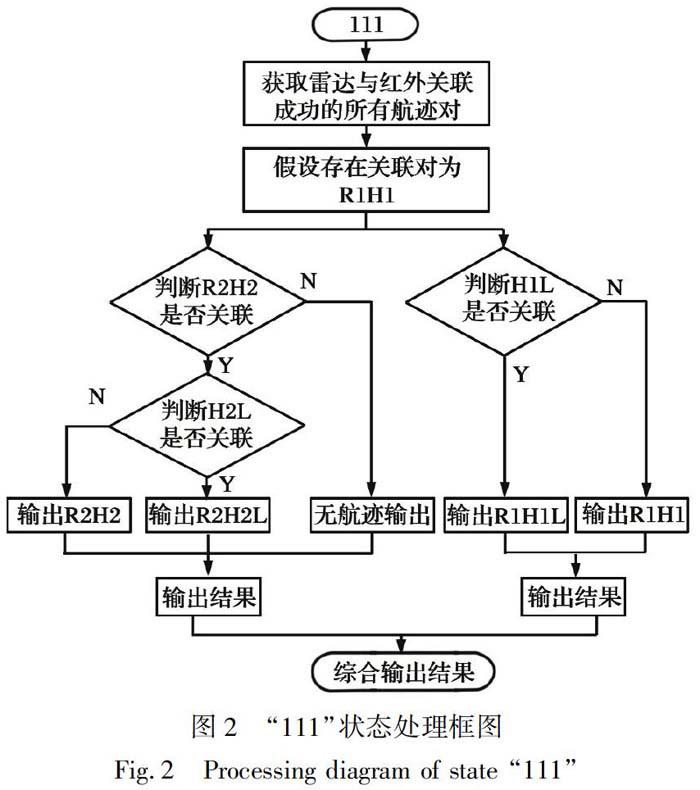
(1) 111:? 表示雷達(dá)與紅外、 紅外與激光、 激光與雷達(dá)之間均有關(guān)聯(lián)對(duì), 其處理流程如圖2所示。
(2) 110/101/011: 以“110”為例, 表示雷達(dá)與激光之間不存在關(guān)聯(lián)對(duì), 雷達(dá)與紅外之間、 紅外與激光之間均存在關(guān)聯(lián)對(duì)。 此時(shí)紅外與另外兩種探測(cè)器均存在關(guān)聯(lián)對(duì), 航跡關(guān)聯(lián)環(huán)節(jié)輸出紅外航跡, 進(jìn)而利用特征融合進(jìn)行目標(biāo)判別, 最終輸出紅外的庫(kù)內(nèi)目標(biāo)航跡。 “101”和“011”的情況與“110”類似。
(3) 010/001/100: 以“010”為例, 表示僅有紅外與激光的航跡之間存在關(guān)聯(lián)對(duì), 雷達(dá)航跡與紅外航跡、 激光航跡均不關(guān)聯(lián), 因此判定雷達(dá)受到了干擾。 “航跡關(guān)聯(lián)”環(huán)節(jié)輸出紅外與激光之間的關(guān)聯(lián)對(duì)。 “001”和“100”的情況與“010”類似。
(4) 000: 該狀態(tài)出現(xiàn)時(shí), 表示三個(gè)探測(cè)器輸出的航跡互相均不兩兩相關(guān)聯(lián), 航跡關(guān)聯(lián)環(huán)節(jié)不再向后續(xù)環(huán)節(jié)輸出用于航跡融合進(jìn)而更新系統(tǒng)航跡的航跡信息, 系統(tǒng)航跡采用外推進(jìn)行自我更新。
多探測(cè)器數(shù)據(jù)層協(xié)同抗干擾技術(shù)是本方案信息融合策略的核心, 該技術(shù)在航跡關(guān)聯(lián)環(huán)節(jié)實(shí)現(xiàn), 在一定程度上體現(xiàn)了復(fù)合體制優(yōu)異的抗干擾性能。
3 多特征融合識(shí)別
特征級(jí)融合屬于屬性融合, 其一般流程如圖3所示。
在整個(gè)信息融合系統(tǒng)結(jié)構(gòu)中, 特征級(jí)融合發(fā)生在航跡關(guān)聯(lián)之后、 航跡融合之前。 航跡關(guān)聯(lián)的結(jié)果是產(chǎn)生一個(gè)或多個(gè)關(guān)聯(lián)航跡組, 每組關(guān)聯(lián)航跡即代表一個(gè)觀測(cè)目標(biāo)。 特征級(jí)融合就是將多個(gè)觀測(cè)目標(biāo)中的多探測(cè)器異類特征加以融合, 利用融合后的多特征信息與模型庫(kù)中待攻擊目標(biāo)的相應(yīng)特征向量進(jìn)行匹配, 根據(jù)匹配率的高低來(lái)判斷是否為模板庫(kù)中的待攻擊目標(biāo)。
導(dǎo)引頭對(duì)目標(biāo)進(jìn)行探測(cè)時(shí)主要面對(duì)三方面的干擾, 分別是強(qiáng)雜波、 假目標(biāo)與有源干擾。 目標(biāo)鑒別需要解決的問(wèn)題是如何在復(fù)雜背景下區(qū)分待攻擊目標(biāo)與假目標(biāo)。 實(shí)際應(yīng)用中, 該問(wèn)題可以歸納為對(duì)典型待攻擊目標(biāo)與假目標(biāo)的二元分類問(wèn)題, 與待攻擊目標(biāo)間的分類不同, 這種鑒別所需的特征是待攻擊目標(biāo)間的共性特征以及待攻擊目標(biāo)與假目標(biāo)之間的差異特征。
特征融合目標(biāo)鑒別方案分為訓(xùn)練階段和鑒別階段。 在訓(xùn)練階段, 分別提取雷達(dá)與紅外探測(cè)器目標(biāo)訓(xùn)練樣本的特征(本方案中,激光探測(cè)器不包含特征信息, 因此僅對(duì)雷達(dá)與紅外探測(cè)器的特征信息進(jìn)行融合), 利用實(shí)測(cè)數(shù)據(jù)分析各個(gè)特征的可分性, 進(jìn)行有效的特征選擇。 本方案選擇的紅外特征包括像素?cái)?shù)、 寬高比、 目標(biāo)復(fù)雜度等;? 雷達(dá)特征包括長(zhǎng)度、 波形熵、 中心距等。 在此基礎(chǔ)上, 利用基于OWA算子的特征融合算法[7]對(duì)雷達(dá)與紅外特征進(jìn)行融合, 得到訓(xùn)練樣本的融合特征向量, 進(jìn)而利用支持向量域描述(Support Vector Data Description, SVDD)模型[8]作為目標(biāo)鑒別器模型進(jìn)行訓(xùn)練并生成多傳感器融合的目標(biāo)訓(xùn)練模板庫(kù)[9]。 訓(xùn)練階段的處理流程如圖4所示。
在鑒別階段, 對(duì)傳感器收到的目標(biāo)雷達(dá)特征與紅外特征進(jìn)行基于OWA算子的特征融合, 并利用SVDD模型對(duì)所得的融合特征向量進(jìn)行判別, 以判別該目標(biāo)是否為庫(kù)內(nèi)目標(biāo)。 鑒別階段的處理流程如圖5所示。
雷達(dá)/紅外復(fù)合制導(dǎo)系統(tǒng)為目標(biāo)識(shí)別提供了比單探測(cè)器更多的有關(guān)目標(biāo)的特征信息, 增大了特征空間維數(shù)。 本方案對(duì)來(lái)自雷達(dá)探測(cè)器和紅外探測(cè)器的異類信息進(jìn)行特征級(jí)融合, 能有效區(qū)分庫(kù)內(nèi)目標(biāo)與庫(kù)外目標(biāo), 提高了正確鑒別待攻擊目標(biāo)的概率。
4 信息融合仿真測(cè)試平臺(tái)構(gòu)建
為了驗(yàn)證復(fù)合導(dǎo)引頭信息融合處理方案的正確性, 結(jié)合現(xiàn)有的硬件條件, 本文基于計(jì)算機(jī)建模仿真技術(shù)搭建了一套多模復(fù)合導(dǎo)引頭信息融合仿真測(cè)試平臺(tái)。
4.1 平臺(tái)組成與功能
測(cè)試平臺(tái)由仿真計(jì)算機(jī)、 仿真接口插件組成, 被測(cè)件為復(fù)合導(dǎo)引頭信號(hào)與信息處理器, 如圖6所示。 其中信號(hào)與信息處理器硬件平臺(tái)與仿真接口板之間用RS422接口連接, 再通過(guò)PCI總線接口連接到仿真計(jì)算機(jī)。
測(cè)試平臺(tái)滿足以下測(cè)試需求:
(1) 模擬產(chǎn)生信息融合處理單元所需要的雷達(dá)、 紅外和激光導(dǎo)引頭前端測(cè)量的數(shù)據(jù), 包括目標(biāo)的位置點(diǎn)跡信息、 目標(biāo)特征信息和對(duì)各傳感器施加一些常見(jiàn)干擾后的數(shù)據(jù)信息;
(2) 將模擬的仿真數(shù)據(jù)按照一定的數(shù)據(jù)格式以一定的數(shù)據(jù)率, 通過(guò)連接仿真計(jì)算機(jī)的仿真接口板實(shí)時(shí)送入信息融合處理單元;
(3) 導(dǎo)引頭信號(hào)與信息處理器通過(guò)相關(guān)接口, 將信息融合處理結(jié)果實(shí)時(shí)傳送至仿真計(jì)算機(jī), 通過(guò)在計(jì)算機(jī)上構(gòu)造的用戶操作界面來(lái)實(shí)時(shí)顯示信息融合系統(tǒng)的處理結(jié)果并進(jìn)行性能評(píng)估。
針對(duì)以上設(shè)計(jì)需求, 設(shè)計(jì)了信息融合仿真測(cè)試軟件界面, 如圖7所示。
測(cè)試軟件主界面分為動(dòng)畫(huà)觀測(cè)區(qū)、 測(cè)量結(jié)果顯示區(qū)、 工作狀態(tài)顯示區(qū)、 工作模式顯示區(qū)、 操作提示區(qū)以及控制面板區(qū)等6個(gè)區(qū)域, 其中前5個(gè)區(qū)域均用來(lái)直觀演示或顯示實(shí)時(shí)數(shù)據(jù)和狀態(tài), 可供用戶觀察測(cè)試過(guò)程現(xiàn)象。 控制面板區(qū)是主要操作的區(qū)域, 具體包含“系統(tǒng)自檢”、 “參數(shù)設(shè)置”、 “開(kāi)機(jī)指令”、 “系統(tǒng)復(fù)位”、 “航向角輸出”、 “俯仰角輸出”、 “運(yùn)動(dòng)軌跡”和“退出系統(tǒng)”等8個(gè)按鈕, 主要提供三大功能:
(1) 控制系統(tǒng)的狀態(tài), 包括自檢、 開(kāi)機(jī)、 復(fù)位和退出等。
(2) 設(shè)置仿真參數(shù): “參數(shù)設(shè)置”按鈕負(fù)責(zé)打開(kāi)如圖8所示的參數(shù)裝訂界面, 可以根據(jù)設(shè)計(jì)好的攻擊場(chǎng)景模擬生成復(fù)合導(dǎo)引頭的觀測(cè)數(shù)據(jù)。 參數(shù)設(shè)置界面中包括5個(gè)區(qū)域: 導(dǎo)引頭工作模式設(shè)置、 目標(biāo)參數(shù)設(shè)置、 干擾設(shè)置、 導(dǎo)彈參數(shù)設(shè)置和環(huán)境參數(shù)設(shè)置。
(3) 顯示處理結(jié)果: 顯示信息融合系統(tǒng)對(duì)目標(biāo)航向角和俯仰角的融合結(jié)果以及導(dǎo)彈和目標(biāo)的運(yùn)動(dòng)軌跡, 并對(duì)系統(tǒng)的性能做出評(píng)估。
4.2 仿真測(cè)試及分析
設(shè)置兩個(gè)目標(biāo), 假定目標(biāo)1為待攻擊目標(biāo), 目標(biāo)2為假目標(biāo);??? 仿真開(kāi)始時(shí)刻彈目距離為2.8 km;??? 仿真步長(zhǎng)為5 ms;??? 當(dāng)彈目距離為1 km時(shí), 雷達(dá)質(zhì)心式箔條干擾出現(xiàn)。 本次仿真的航向角融合結(jié)果見(jiàn)圖9。
由圖可知, T時(shí)刻之前, 雷達(dá)、 紅外和激光探測(cè)器均未受到干擾, 航跡關(guān)聯(lián)控制字為“111”, 航跡關(guān)聯(lián)的輸出結(jié)果為兩組關(guān)聯(lián)對(duì), 分別代表目標(biāo)1和目標(biāo)2。 融合系統(tǒng)進(jìn)入特征融合階段, 將這2個(gè)觀測(cè)目標(biāo)的雷達(dá)和紅外特征加以融合, 利用融合后的多特征信息與模型庫(kù)中待攻擊目標(biāo)的相應(yīng)特征向量進(jìn)行匹配, 根據(jù)匹配率的高低判斷出目標(biāo)1是庫(kù)內(nèi)目標(biāo), 目標(biāo)2是庫(kù)外目標(biāo), 因此融合系統(tǒng)將目標(biāo)1的融合結(jié)果作為系統(tǒng)航跡。
T時(shí)刻時(shí), 雷達(dá)箔條干擾出現(xiàn), 雷達(dá)目標(biāo)1的航跡逐漸偏離紅外、 激光目標(biāo)1的航跡。 如前文所述, 此時(shí)的航跡關(guān)聯(lián)情況為“110”(雷達(dá)目標(biāo)2與紅外目標(biāo)2關(guān)聯(lián)成功、 紅外目標(biāo)1與激光目標(biāo)關(guān)聯(lián)成功, 雷達(dá)目標(biāo)與激光目標(biāo)關(guān)聯(lián)失敗), 根據(jù)融合策略, 航跡關(guān)聯(lián)環(huán)節(jié)輸出2個(gè)紅外目標(biāo)的航跡, 進(jìn)而通過(guò)后續(xù)的特征融合環(huán)節(jié)對(duì)這2個(gè)紅外目標(biāo)進(jìn)行鑒別, 鑒別出目標(biāo)1為庫(kù)內(nèi)目標(biāo), 目標(biāo)2為庫(kù)外目標(biāo), 因此融合系統(tǒng)將以紅外目標(biāo)1的航跡來(lái)更新系統(tǒng)航跡。
從仿真測(cè)試可以看出, 本方案利用航跡關(guān)聯(lián)協(xié)同抗干擾和特征級(jí)融合兩大關(guān)鍵技術(shù), 起到了抗干擾和正確鑒別目標(biāo)的作用。
5 結(jié)? 論
本文針對(duì)毫米波雷達(dá)/紅外成像/半主動(dòng)激光三模復(fù)合導(dǎo)引頭, 給出了一種分布式、 特征級(jí)信息融合方案, 該方案采用了多探測(cè)器數(shù)據(jù)層協(xié)同抗干擾和特征級(jí)信息融合兩大關(guān)鍵技術(shù)。 通過(guò)自行設(shè)計(jì)構(gòu)建的專用數(shù)字仿真測(cè)試平臺(tái)驗(yàn)證, 表明該方案能有效提高導(dǎo)引頭的抗干擾性能和對(duì)目標(biāo)的鑒別性能, 可為復(fù)合導(dǎo)引頭的工程化應(yīng)用提供技術(shù)參考。
參考文獻(xiàn):
[1] 吳爽. 紅外成像導(dǎo)引頭信號(hào)處理算法研究[D]. 西安: 西安電子科技大學(xué), 2011: 1-3.
Wu Shuang. Study on Algorithms of Signal Processing Involved in Infrared Image Seeker[D]. Xian: Xidian University, 2011: 1-3.(in Chinese)
[2] 王狂飆. 激光制導(dǎo)武器的現(xiàn)狀、 關(guān)鍵技術(shù)與發(fā)展[J]. 紅外與激光工程, 2007, 36(5): 651-653.
Wang Kuangbiao. Statusquo, Key Technology and Deve-lopment of Laser Guided Weapon[J]. Infrared and Laser Engineering, 2007, 36(5): 651-653.(in Chinese)
[3] 艾薇, 劉崢. 雷達(dá)/紅外復(fù)合導(dǎo)引頭信息融合技術(shù)研究 [J].航空兵器, 2007(4): 30-31.
Ai Wei, Liu Zheng. The Survey of Radar/IR Seeker Information Fusion Technique[J]. Areo Weaponry, 2007(4): 30-31. (in Chinese)
[4] 左保軍, 況耀武. 紅外/激光雙模導(dǎo)引頭的光學(xué)系統(tǒng)[J]. 紅外與激光工程, 2009, 38(3): 496-498.
Zuo Baojun, Kuang Yaowu. Optical Design of the IR/Laser Dual-Mode Seeker[J]. Infrared and Laser Engineering, 2009, 38(3):? 496-498. (in Chinese)
[5] 李輝, 程琤, 張安, 等. 基于反饋結(jié)構(gòu)的多傳感器自適應(yīng)航跡融合算法[J]. 計(jì)算機(jī)學(xué)報(bào), 2006, 29(12): 2232-2237.
Li Hui, Cheng Zheng, Zhang An, et al. Adaptive Algorithm for Multisensor Track Fusion with Feedback Architecture[J]. Chinese Journal of Computers, 2006,29(12):? 2232-2237. ( in Chinese).
[6] 韓崇昭, 朱紅艷, 段戰(zhàn)勝, 等. 多源信息融合[M]. 2版. 北京: 清華大學(xué)出版社, 2012:? 7-10.
Han Chongzhao, Zhu Hongyan, Duan Zhansheng, et al. Multi-Source Information Fusion[M]. 2nd ed.? Beijing: Tsinghua University Press, 2012:? 7-10.( in Chinese)
[7] Yager R R. On Ordered Weighted Averaging Aggregation Operators in Multicriteria Decision Making[J]. IEEE Transactions on Systems, Man and Cybernetics, 1998, 18(1):? 183-190.
[8] 劉艷紅, 薛安榮, 史習(xí)云. K-means聚類與SVDD結(jié)合的新的分類算法[J].計(jì)算機(jī)應(yīng)用研究,? 2010, 27(3):? 883-886.
Liu Yanhong, Xue Anrong, Shi Xiyun. New Classification Algorithm K-Means Clustering Combined with SVDD [J].Application Research of Computers, 2010, 27(3):??? 883-886. (in Chinese)
[9] 李龍, 劉崢. 基于訓(xùn)練特征空間分布的雷達(dá)地面目標(biāo)鑒別器設(shè)計(jì)[J].電子與信息學(xué)報(bào), 2016, 38(4):? 950-957.
Li Long, Liu Zheng. Identifier for Radar Ground Target Based on Distribution of Space of Training Features[J].? Journal of Electronics & Information Technology,? 2016, 38(4):?? 950-957. (in Chinese)