大跨度鋼桁X型拱橋桿件拼裝對位及空間姿態分析
2018-04-11 09:09:18趙潔茹許惟國
四川建筑 2018年5期
關鍵詞:施工
趙潔茹, 許惟國, 劉 歡
(西南交通大學土木工程學院橋梁與隧道工程, 四川成都 610031)
纜索吊裝施工是鋼拱橋很普遍的施工方式。其中的拼裝環節是控制拱圈精確施工的關鍵。以往的纜索吊裝施工方式不論是節段拼裝還是單桿件吊裝,都沒有建立預先的精確對位機制,在施工中很難完全與設計匹配。由于無法實現桿件所有自由度的調整,對位時采用粗放的人工撬棍拉拽或其他粗放施工模式,強制拼裝造成施工誤差積累,給拱橋合龍造成困難。所以需要對拼裝時精確對位的條件和空中空間姿態調整的辦法進行探索,優化桿件安裝對位的方式和精度,降低施工誤差和桿件應力積累,規避施工風險。
1 工程背景
1.1 橋梁概況
怒江四線特大橋是主橋跨度490 m 的上承式鋼箱桁架拱橋, 主桁弦桿均為箱型截面。怒江橋施工為提籃式桁架結構,拱肋內傾角3.657 8°。主拱圈采用纜索吊機單桿件吊裝懸臂扣掛法施工。此橋桿件之間采用高強螺栓連接,拼接精度要求極高,以往拼裝對位時采用人工撬棍拉拽或其他粗放施工模式,強制拼裝造成施工誤差積累、應力積累造成合龍困難(圖1、圖2)。

圖1 怒江四線特大橋平面布置

圖2 怒江四線特大橋立面布置
1.2 吊裝桿件分類及安裝順序
怒江橋鋼結構桿件眾多,僅主拱肋有1 162 根桿件、433 個節點。每個節段拱圈桿件安裝順序:
平面:內側拱肋→上下平聯→橫聯→外側拱肋;
立面:下弦桿→腹桿→上弦桿,要求形成閉合穩定三角形(圖3)。

圖3 拱圈節間示意
本橋設計為三維的空間結構體系,起吊到位后需調整三個平動及仰角、內傾角及桿件自身的旋轉角;桿件大部分為插入式,桿件間隙僅為2 mm,部分桿件設計更是等寬度無間隙插入,拼接難度極大。
2 桿件端面拼接匹配條件
根據空間幾何描述理論,端面匹配條件有三個(圖4)。
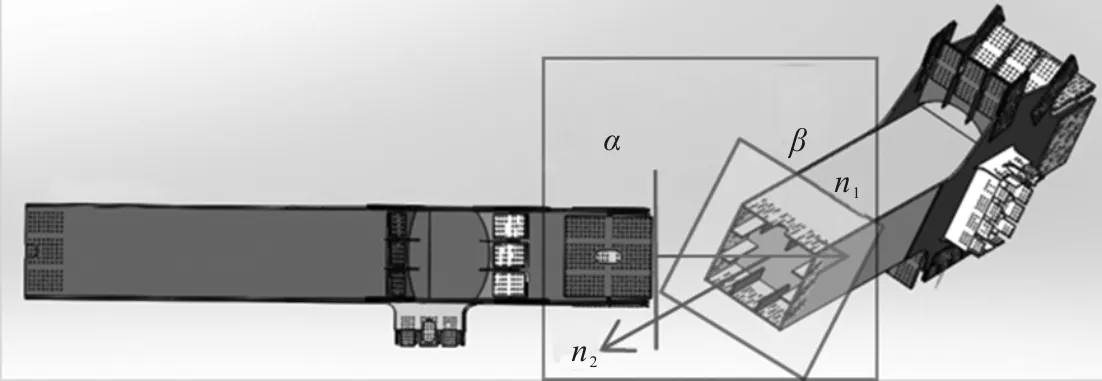
圖4 調整姿態前的兩根弦桿
(1)兩根桿件的對應端面法線平行;
(2)兩根桿件的某一側面的法線平行;
(3)兩個端面上有對應的一個點重合。
2.1 兩根桿件的對應端面法線平行
三個坐標點決定一個面,端面上的法線就可以用三個點來推導出來,代數幾何方法來表示。已知面α上三個點的空間坐標,設三個點分別為A1(x1,y1,z1),B1(x2,y2,z2),C1(x3,y3,z3)。
另一個面β,三個點的空間坐標值分別為A2(x4,y4,z4),B2(x5,y5,z5),C2(x6,y6,z6)。
如果面α和β的平面方程分別為:
Ax+By+Cz+1=0Dx+Ey+Fz+1=0
把兩個面上的已知點坐標分別代入兩個平面方程求得兩個平面方程的具體值,由兩個平面方程可以分別求得兩個面的法線方程。首先求得平面方程的一般形式:Ax+By+Cz+D=0,則向量(A,B,C)就是平面的一個法向量。
因此可以通過找桿件上端面的至少三個測點來尋找端面的法向量。.兩個法向量平行就可以保證兩個端面相互平行(圖5)。

圖5 調整兩根弦桿端面法線平行后的空間姿態
2.2 兩根桿件的側面的法線平行
因為兩個端面是有具體的形狀的,因此要使得桿件端面相互平行還不夠,還需要調整兩端面空間繞著軟件軸心的角度一致,具體反映出來就是兩個桿件某一側面的法線平行。同第一個條件,法線平行可以通過各自某一側面上的不同三個測點來推導出(圖6)。

圖6 繼續調整兩根弦桿某一側面法線平行后的空間姿態
2.3 兩根桿件的端面上有對應的一個點重合
這個條件可以保證兩個端面在平行的前提下相互接觸。點的重合可以通過兩個桿件的平動來實現。調整之后桿件可以完全重合(圖7)。

圖7 繼續調整兩根弦桿端面對應某一點重合后的的空間姿態
最后想得到這個結論就是只要兩個桿件端面上各自三個測點推出的法線平行,以及兩個桿件某一側面上各自三個測點推出的法線平行,就可以保證兩個桿件最后只需要平移就能夠實現桿件精確對接。
3 既成拱圈桿件端面位置信息獲取
3.1 正裝計算法有限元拱圈施工模型
基于有限元軟件Midas Civil采用正裝計算法建立拱圈施工仿真模型,得到在主拱圈節段吊裝施工過程中桿件的端面幾何信息。本橋設計為活載的預拱度由立柱承擔,拱圈在拼裝時的幾何位置信息提取就只需考慮恒載和溫度因素[1]。墩身、蓋數值、主拱圈桿件、扣塔、扣錨梁采用梁單元,扣、錨索鋼絞線采用索單元,橋墩墩柱根底部及錨碇均為固結、扣塔與交界墩蓋梁間固結;主拱圈懸臂拼裝過程中,拱腳與拱座固結。計算模型如圖8所示。

圖8 正裝法有限元拱圈施工計算模型
3.2 既成拱圈桿件端面信息的利用
得到需要拼裝的桿件的端面四個測點的幾何位置坐標。這個坐標可以指導桿件的拼裝。既成拱圈端面的幾何信息是固定且完全正確的,而空中桿件的位置精確可調,空中測點位置也是精確可測的。所以只要不斷比較兩個桿件端面及側面測點所推出的法線方程,讓空間吊裝的桿件動態的法線方程調整之后逼近既成拱圈上固定的法線方程,就可以實現精準對位。逼近的過程需用到自動化相關知識,桿件的自動化對接技術和太空飛行器對接技術類似[4]。我們所得到的信息正是一些自動化裝置比如機械臂拾取信息并實現桿件自動化拼裝過程前的最后一步[5]。
4 吊裝桿件各個自由度運動的方式
空中的桿件通過纜索系統以平動方式吊到了既成拱圈中的目標桿件附近之后,就必須通過小尺度的調整才能與目標桿件匹配。
空中桿件的吊裝可以看成剛體的運動。六個自由度就可以描述剛體的運動,因此在空中的運動方式在笛卡爾坐標系中可以分解為6種,分別是三個坐標軸方向的平動和繞三個坐標軸的轉動[2]。這些運動方式就是桿件空間姿態調整的方式。
根據前面得到的桿件端面匹配條件,一個剛體的姿態理論上只要調整三次就一定能達到任意給定的空間姿態。但每一次調整都可以分解成6中運動方式中的一種或幾種[2]。
4.1 原施工吊裝方案
原定弦桿和腹桿的吊裝模式是一根桿件兩端側面各有兩個吊耳,吊耳上面掛著高強吊帶,兩根吊帶豎向交匯在吊鉤上。因此是雙吊鉤,四個吊點的形式。
在拱圈弦桿拼接完了以后,平聯的吊裝方式是左右兩排吊鉤一起作業,采用四個吊鉤四吊點的形式。由于弦桿和腹桿的吊裝方式更加復雜,并且在抽象上可以包含平聯的吊裝方式,所以這里只討論雙吊鉤四個吊點的形式(圖9、圖10)。

圖9 纜索吊裝原理模擬

圖10 空中弦桿、腹桿和平聯桿件以及正在和既成拱圈拼裝的空中吊裝桿件吊裝
4.2 原吊裝方案所能實現桿件的運動形式
連接吊鉤的左右兩邊的起重系統通過控制卷揚機來控制兩邊索長的伸長和縮短來控制桿件的豎直方向(圖9中z方向)上下平動。
兩個吊鉤上端行車體系的牽引系統可以實現桿件整體沿著水平方向(圖9中x方向)運動。
理論上,索鞍是可橫移式形式,因此承重系統、牽引系統和起重系統可以沿著橋跨的橫向實現移動,吊著的桿件也可以橫向(圖9中y方向)移動。但是索鞍橫移十分麻煩,一般對于提籃拱橋吊裝,整個拱圈拼裝過程中橫移不超過4次。因此索鞍的橫移是對應覆蓋一部分大的拱圈區域,索鞍橫移是大尺度的橫移。還要加一個機構來實現吊裝桿件微小橫移。
兩邊起重系統的卷揚機使一邊起重索伸長,另一邊起重索縮短,使得吊鉤下的桿件一端有向上的運動趨勢,另一端有向下運動趨勢。這樣就實現了桿件繞著橫向軸線(圖9中y軸)的轉動(圖11)。

圖11 目前已經實現的吊裝桿件運動方式
4.3 在既有吊裝體系上添加新的機構和驅動模式
但是這種吊裝方式,并不能實現桿件繞桿件軸線方向(圖9中x軸)的轉動、繞著豎向(圖9中z軸)和橫向(圖9中y方向)小尺度的平移。提籃拱橋的形式,因此桿件拼裝時的空間姿態調整一定存在下圖中的三種運動方式(圖12)。
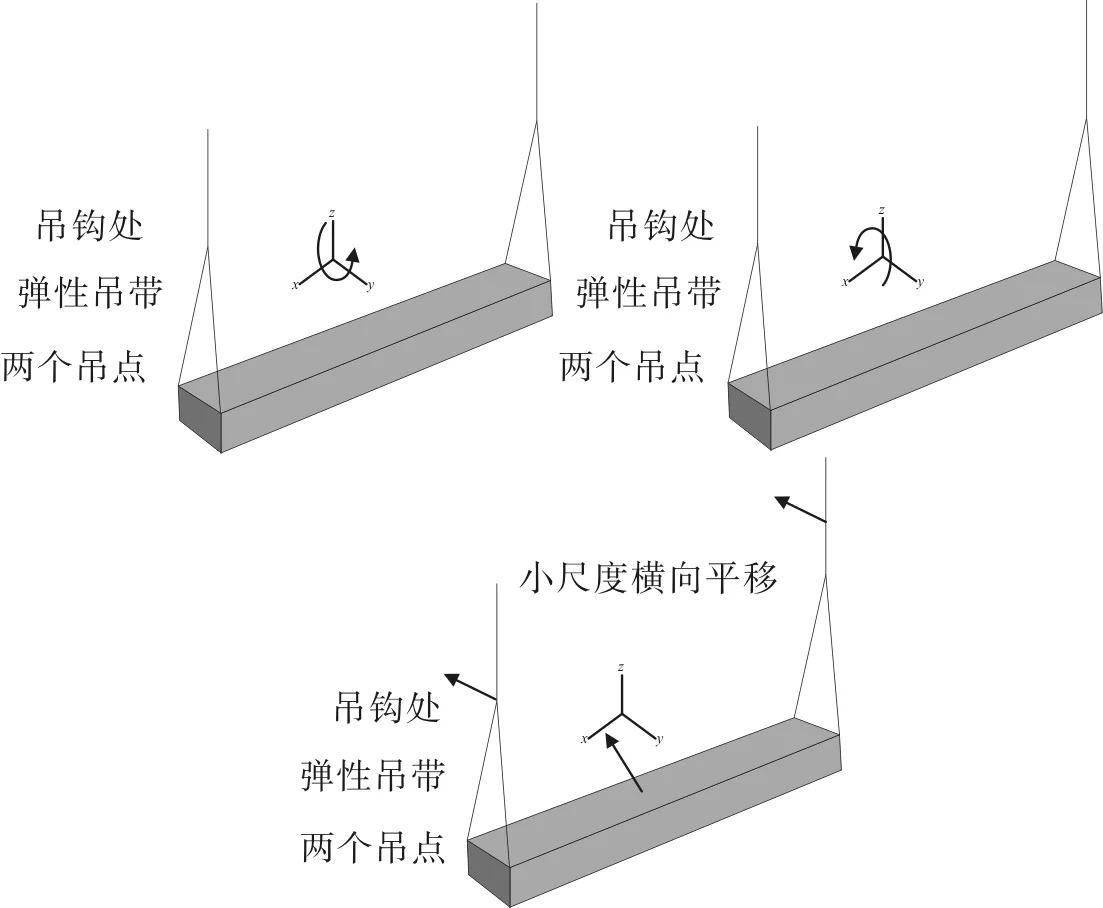
圖12 未實現的吊裝桿件運動方式
需要給吊裝結構加上新的機構和驅動來實現這幾種未實現的運動方式。
4.3.1 桿件縱轉實現方式
實現桿件繞著桿件軸向的轉動可以通過同時改變兩端各自兩條彈性條帶的長度來達到桿件橫轉的效果。吊帶和吊鉤以及桿件上的吊耳相連,很容易想到可以在吊鉤或者吊耳上添加驅動裝置來改變吊帶的長度。兩種簡單實用的方式可以實現,一種是手動調節方式,另一種遙控實現自動調節(圖13)。

圖13 通過改變吊帶相對長度來實現桿件縱轉
手動方式是在吊鉤和吊帶連接的地方加一個法蘭連接,法蘭上面是螺絲桿,下面是法蘭盤,扭動上面的螺絲桿可以改變相對距離。這樣一個吊鉤上面分出來的兩根吊帶就可以調節成不同的長度,一個縮短一根伸長,從而實現桿件橫轉。其驅動方式是人力驅動,人站在既成拱圈的平臺上面,調節螺絲桿。
自動化調節的方式是在吊鉤處嵌固一個電動液壓推桿。電液推桿以電動機為動力源,是將電動機的旋轉運動轉變為推桿的直線往復運動的電力驅動裝置。電動液壓推桿適用于需要復推、拉直線(或往復旋轉一定角度)運動,也可用于需上升、下降或夾緊工作物的場所,吊帶長度改變的實現原理是通過雙向齒輪泵輸出壓力油,經油路集成塊的控制,至油缸,實現活塞桿的往復運動,來調節吊帶長度[3](圖14)。

圖14 法蘭連接及電動液壓推桿
電動液壓桿機構可以遙控,并可進行遠距離高空及危險地區的集中或程序控制,相對法蘭機構來說更加方便。
4.3.2 桿件豎向轉動實現方式
實現桿件豎轉的方式是在桿件端部加一根可以旋轉的引導梁,引導梁的一部分露在吊裝桿件外,在既成桿件上安裝一個引導槽,當截面靠近既成拱圈端面時,通過繩索拉動縱梁沿著槽型梁運動,就可以實現桿件的豎轉。這種方式還可以引導桿件進行小范圍的平動。因此可以作為最后的調整步驟(圖15)。

圖15 通過加一個可旋轉的縱梁實現桿件豎轉
4.3.3 桿件小尺度橫向平移的實現方式
在吊鉤處可以再添加一個橫向電動液壓桿機構及對拉機構來實現桿件小尺度的橫向平移。
5 結論
以怒江四線特大橋為工程背景,研究吊裝桿件端面匹配的幾何條件,創新性提出了實現空中桿件各個自由度運動的機構措施,得到既成拱圈的理論最優幾何位置信息的獲取方法,并對自動化拼裝實現進行展望。這些工作有助于實現纜索吊裝桿件拼接對精確施工。避免了強制拼裝的粗放施工模式的造成的施工誤差積累、應力積累以及合龍困難后果。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48
