面向無線傳感器網(wǎng)絡節(jié)點的臍橙采摘機器人定位研究
2018-04-12 00:52:39靳繼紅
農(nóng)機化研究 2018年4期
關鍵詞:模型
田 磊,靳繼紅
(1.河南工業(yè)職業(yè)技術(shù)學院,河南 南陽 473000;2.焦作師范高等專科學校 計算機與信息工程學院,河南焦作 454000)
0 引言
近年來,隨著科技的發(fā)展,無線傳感器、物聯(lián)網(wǎng)及智慧地球的發(fā)展深入人心,已成為各國家科技和產(chǎn)業(yè)競爭的焦點[1-5]。現(xiàn)階段,傳感器、物聯(lián)網(wǎng)、無線通信、儀器儀表和自動化的快速發(fā)展提高了機器人的應用能力,采摘機器人因此獲得了長足的發(fā)展,已成為科技研究最前沿的領域之一[6-13]。本文以無線傳感器網(wǎng)絡技術(shù)為核心,設計了一種面向網(wǎng)絡節(jié)點的臍橙采摘機器人定位算法,并利用MatLab進行算法仿真實驗,驗證了系統(tǒng)的可靠性和穩(wěn)定性。
1 無線傳感器網(wǎng)絡技術(shù)
無線傳感器網(wǎng)絡一般由許多具有無線通信、感知環(huán)境變化、信息存儲與處理的傳感器構(gòu)成,包含多種感知功能不一的傳感器節(jié)點。這些節(jié)點可對目標環(huán)境內(nèi)的信息變化進行采集、判斷或數(shù)據(jù)發(fā)送,形成對目標環(huán)境實時監(jiān)控和對目標定位的網(wǎng)絡[14-18]。無線傳感器網(wǎng)絡結(jié)構(gòu)主要包括傳感器、匯聚和管理站等部分,其體系結(jié)構(gòu)如圖1所示。感知區(qū)域到處分布了許多的無線傳感器節(jié)點,它們以無線網(wǎng)絡為平臺,通過自組織形式,順著其它節(jié)點逐級跳動傳遞和交換信息,在多次跳轉(zhuǎn)后集中到匯聚節(jié)點,最后由匯聚節(jié)點傳到遠程監(jiān)控端。無線傳感器的核心是嵌入式控制系統(tǒng),其信息處理和存儲空間有限;而匯聚節(jié)點信息處理和存儲空間明顯增強,其可通過無線網(wǎng)絡與外部互聯(lián)網(wǎng)或衛(wèi)星進行通信,發(fā)布管理節(jié)點的監(jiān)測信息。
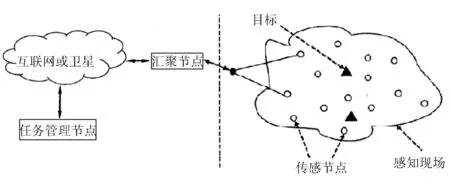
圖1 無線傳感器網(wǎng)絡結(jié)構(gòu)圖
無線傳感器節(jié)點結(jié)構(gòu)分支多,往往和應用目標區(qū)域及實現(xiàn)的功能相關,但主要還是由傳感器、處理器、無線通訊及電源等4個模塊組成,如圖2所示。

圖2 無線傳感器節(jié)點框架圖
無線傳感器節(jié)點模塊眾多:傳感器模塊根據(jù)被測物理信息選用合適的類型,一般采用A/D電路實現(xiàn)模擬信號轉(zhuǎn)化為數(shù)字信號;處理器模塊是節(jié)點最重要的部分,主要負責信息的采集、傳輸、決策制定、保存和發(fā)出控制指令;無線通訊模塊則主要負責各匯聚節(jié)點間信息的共享;電源模塊為各無線傳感器和匯聚節(jié)點提供能量[19-21]。
2 臍橙采摘機器人系統(tǒng)模型
2.1臍橙采摘機器人運動模型
在實驗狀態(tài)下,即在沒有其他外在條件(如環(huán)境、天氣)干擾的情況下,臍橙采摘機器人運動模型能夠形象地表示其各個部件的運動過程[22-25]。但在日常作業(yè)中,由于受到環(huán)境和天氣的影響,采摘機器人會產(chǎn)生一些特定的噪聲,使得模型具有一定不穩(wěn)定性,因而使其不能準確描述采摘機器人運動變化狀態(tài)[26-27]。為了解決上述問題,特以一種非線性函數(shù)對采摘機器人運動狀態(tài)進行描述,該模型描述了其位姿信息S0,K在控制參數(shù)uk和干擾因數(shù)wk影響下隨時間的變化。采摘機器人某時間節(jié)點狀態(tài)只與上一某時間節(jié)點狀態(tài)及當前某時間節(jié)點的控制參數(shù)有關,與過去時間節(jié)點的信息沒有聯(lián)系。采摘機器人運動方程為
(1)
其中,Dk和θk分別表示采摘機器人與第k個無無線傳感器節(jié)點的距離和角度。
2.2無線傳感網(wǎng)絡觀測系統(tǒng)模型
本文主要研究問題是面向無線傳感器網(wǎng)絡節(jié)點的臍橙采摘機器人準確定位算法,前面一節(jié)主要介紹了采摘機器人運動模型,本節(jié)介紹無線傳感網(wǎng)絡觀測系統(tǒng)模型。觀測系統(tǒng)模型參數(shù)主要是獲取采摘機器人和無線傳感器網(wǎng)絡節(jié)點之間的相對距離和角度等信息。該模型表達式為
(2)
其中,i、j表示第i和j個無線傳感器網(wǎng)絡節(jié)點;Si,1,k={Si,1,…,Si,k}表示k時刻采摘機器人和無線傳感器網(wǎng)絡節(jié)點的位置、角度狀態(tài);vk表示模型噪聲。
該模型觀測方程為
(3)
其中,其中rk+1和θk+1分別為第k+1個傳感器節(jié)點相對于機器人的位置和角度;φ表示機器人經(jīng)過傳感節(jié)點前后的角度差。
模型觀測函數(shù)位姿和傳感節(jié)點之間的雅克比矩陣為
(4)
(5)

臍橙采摘機器人模型如圖3所示。

圖3 臍橙采摘機器人模型
3 臍橙采摘機器人定位算法
3.1臍橙采摘機器人環(huán)境建模
采摘機器人一般都是在比較復雜的環(huán)境中進行作業(yè),因而對采摘機器人而言首要的問題是感知周邊環(huán)境信息[28]。獲得周邊環(huán)境信息,采摘機器人才能進行定位,順利開展作業(yè)任務。其在目標區(qū)域自動定位時,對作業(yè)區(qū)域現(xiàn)場感知和判斷都需要無線傳感器網(wǎng)絡節(jié)點平臺的支撐[29]。通過無線傳感器網(wǎng)絡節(jié)點平臺,采摘機器人可以與其他環(huán)境節(jié)點進行信息的傳輸與交互,進而獲取自身位置狀態(tài)和所在環(huán)境的信息[30]。在本設計中,建立無線傳感器網(wǎng)絡節(jié)點平臺是研究的重要環(huán)節(jié),對臍橙采摘機器人自動定位具有決定性意義。臍橙采摘機器人目標區(qū)域傳感器網(wǎng)絡結(jié)構(gòu)如圖4所示。
在目標區(qū)域,無線傳感器節(jié)點分為兩種:一種是用來標示障礙物位置;一種用來感知機器人位置。這些節(jié)點隨機分布在目標區(qū)域,并依次貼上電子便簽。機器人上安裝有RFID射頻信號器,隨著采摘機器人的移動,無線傳感器感知機器人信號強度變化判定與機器人的距離,也方便機器人識別障礙和目標。載有RFID射頻信號器的機器人在作業(yè)中可以根據(jù)兩種無線傳感節(jié)點獲取障礙或者自身位置信息。無線傳感器和RFID的有效結(jié)合為機器人實現(xiàn)了避障和定位功能,大大提高了機器人的自主性和靈活度。
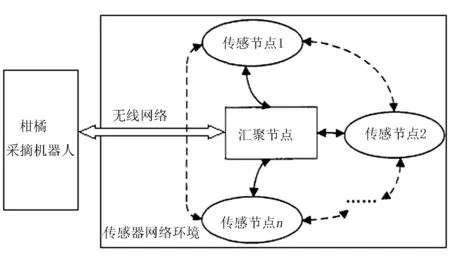
圖4 目標區(qū)域無線傳感器網(wǎng)絡結(jié)構(gòu)圖
3.2定位算法原理
在無線傳感器網(wǎng)絡應用中,節(jié)點采集信息與其位相互對應,因此確定未知節(jié)點的位置對采摘機器人的自動定位具有重要意義。在三維空間坐標中,未知無線傳感器網(wǎng)絡節(jié)點的信號強度與機器人上的RFID射頻信號器距離遠近的理論分布,如圖5所示。
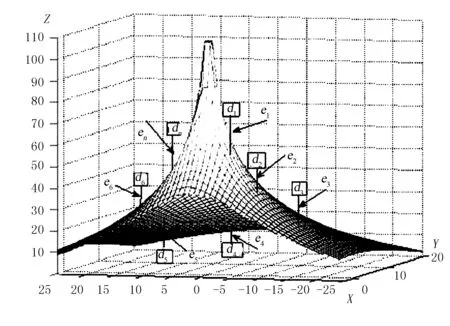
圖5 未知無線傳感器網(wǎng)絡節(jié)點的信號強度分布圖
圖5中:X、Y軸表示RFID射頻信號器到無線傳感器節(jié)點的距離;Z軸表示無線傳感器節(jié)點接收到的信號強弱;d1、d2、d3、…、dn為無線傳感器節(jié)點實際位置;e1、e2、e3、…、en為無線傳感器節(jié)點與實際信號強度之間的偏移量。由于無線傳感器節(jié)點接收到的信號強度值需要加上隨機噪聲,因此無線傳感器節(jié)點信號強度值只與Z向坐標存在一定差異。可以看出,在三維空間坐標中,未知無線傳感器網(wǎng)絡節(jié)點的信號強度構(gòu)成的曲面形狀和路徑衰減因子k息息相關,因此可以確定適當?shù)哪繕撕瘮?shù)求出k值和無線傳感器網(wǎng)絡節(jié)點位置坐標。
無線傳感器網(wǎng)絡節(jié)點定位原理為:倘若存在n(n>3)個位置坐標已知無線傳感器網(wǎng)絡節(jié)點,且第i個無線傳感器節(jié)點對RFID射頻信號器的信號強度RSSI(i)也確定,則可以依據(jù)信號損耗模型確定目標函數(shù);通過求出其最優(yōu)解,便能夠確定未知無線傳感器網(wǎng)絡節(jié)點的坐標(x,y)和路徑衰減因子k。
3.3確定目標函數(shù)
依據(jù)無線傳感器節(jié)點定位原理,能夠確定合適的目標函數(shù),然后求解出目標函數(shù)最優(yōu)解,便可得到節(jié)點的坐標與衰減因子k。為了讓節(jié)點到曲面的Z向距離最小,即求|Zn(i)-RSSI(i)|或(Zn(i)-RSSI(i))2的最小值,因全部節(jié)點個數(shù)為n,確定的目標函數(shù)為

(6)
(7)
同時,也可以先求所有節(jié)點[Zn(i)-RSSI(i)]的和,然后再取其絕對值,則

(8)
3.4算法仿真試驗設計
為驗證本文設計的臍橙采摘機器人準確定位算法的可靠性,利用MatLab仿真軟件、采用M語言進行編程,實現(xiàn)各目標函數(shù)進行標定效果分析。在模擬仿真中,無線傳感器節(jié)點分布在20m×20m的目標區(qū)域中,系統(tǒng)按照路徑節(jié)點編號,實現(xiàn)機器人的自動定位。算法仿真流程如圖6所示。
自動定位算法仿真各流程說明如下:
1)設定信標節(jié)點。初始化,設定模型參數(shù),1次取100組數(shù)據(jù),在MatLab中繪制出模型曲面。
2)加入隨機噪聲。在理論信號值的基礎上加入信號噪聲,構(gòu)成實際信號值。
3)篩選。為了提高采摘機器人定位準確度,篩除掉信號較弱的個別信標節(jié)點。
4)確定優(yōu)化初值。利用極大似然法優(yōu)化初值。
5)優(yōu)化計算。利用MatLab中的優(yōu)化函數(shù)進行優(yōu)化,減少定位誤差。
6)輸出結(jié)果。利用 MatLab 輸出結(jié)果圖。
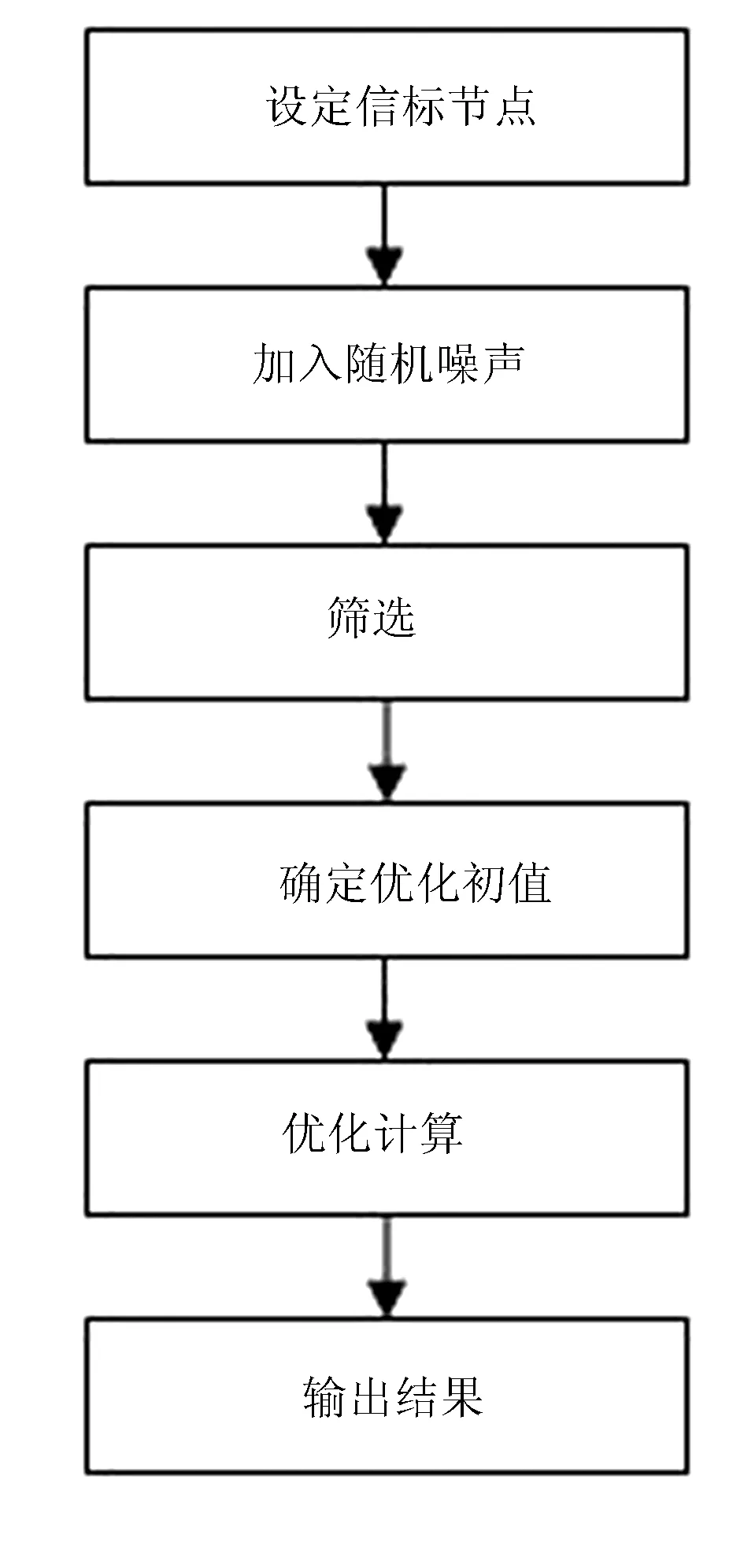
圖6 自動定位算法仿真流程圖
4 實驗與結(jié)果分析
為了驗證臍橙采摘機器人自動定位算法的準確性和可靠性,在作業(yè)區(qū)域隨機安放了100個無線傳感器信標節(jié)點,假設每個節(jié)點的通信半徑為5m,當機器人(即RFID射頻信號器)與節(jié)點之間的距離超過5m時,則無法收到信號;然后對定位算法行了實驗。實驗中,由于節(jié)點和RFID射頻信號器的相對坐標不確定,因此在求解中以采摘機器人初始位姿為基準,建立三維坐標直角系。仿真試驗環(huán)境和結(jié)果如圖7所示。
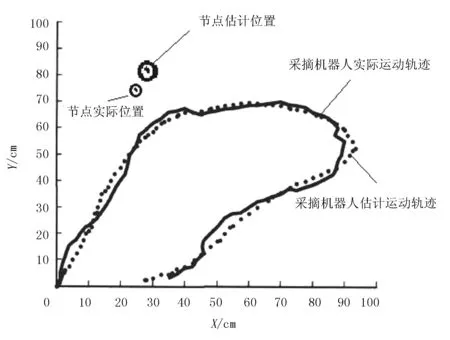
圖7 采摘機器人實驗結(jié)果
圖7中,虛、實線分別為采摘機器人估計和實際的運動路徑;虛點和實點分別為網(wǎng)絡節(jié)點估計和實際位置。由圖7可以看出:該定位算法能夠準確估計采摘機器人的位置,且誤差系數(shù)小,有效抑制了累計誤差的加大,使得機器人估計誤差在5cm以內(nèi),說明了本文自動定位算法的準確性和可行性。
5 結(jié)論
首先分析了無線傳感器技術(shù)特點、原理及其優(yōu)越性,然后對臍橙采摘機器人的運動模型和傳感網(wǎng)絡觀測系統(tǒng)模型進行闡述。根據(jù)實際需求,設計研究了一種面向無線傳感技術(shù)的定位算法,采用極大似然法確定優(yōu)化初值,根據(jù)目標函數(shù)并利用MatLab進行函數(shù)優(yōu)化,提高定位準確度。系統(tǒng)將RFID和無線傳感器網(wǎng)絡技術(shù)相結(jié)合,應用于采摘機器人的自動定位,對實現(xiàn)果實種植無人化具有重要現(xiàn)實意義。實驗結(jié)果表明:該定位算法能夠準確估計采摘機器人的位置,且誤差系數(shù)小,使得機器人估計誤差在5cm以內(nèi),說明了本文自動定位算法的準確性和可行性。
參考文獻:
[1]吳顯.基于多傳感器信息融合的移動機器人定位方法研究[D].北京:北京交通大學,2016.
[2]王亞子,楊建輝.改進粒子群算法的無線傳感器網(wǎng)絡節(jié)點定位[J].計算機工程與應用,2014(18):99-102.
[3]王衛(wèi)星,高奕龍,陳佳森.基于Zigbee無線傳感器網(wǎng)絡的山地橘園精細化滴灌系統(tǒng)設計[J].電子技術(shù)與軟件工程,2014(14):19-20.
[4]徐紅軍.無線傳感器網(wǎng)絡環(huán)境下移動機器人節(jié)點定位算法研究[D].長沙:湖南工業(yè)大學,2014.
[5]陳劍.無線傳感器網(wǎng)絡技術(shù)在多點控制中的應用與研究[D].北京:北京服裝學院,2013.
[6]楊冬梅.基于無線傳感器網(wǎng)絡的多移動機器人避障方法研究[D].哈爾濱:哈爾濱工業(yè)大學,2013.
[7]馬偉.基于無線傳感器網(wǎng)絡的室內(nèi)定位系統(tǒng)節(jié)點的設計與實現(xiàn)[D].成都:電子科技大學,2013.
[8]王方.基于多移動機器人的無線傳感器網(wǎng)絡系統(tǒng)[D].太原:太原理工大學,2013.
[9]石海霞.面向機器人定位的無線傳感器網(wǎng)絡系統(tǒng)的研究與設計[D].南京:南京理工大學,2013.
[10]薛粹瑤.室內(nèi)無線傳感器網(wǎng)絡中轉(zhuǎn)發(fā)節(jié)點的最優(yōu)放置問題研究[D].上海:上海交通大學,2013.
[11] 李江洪.基于無線傳感節(jié)點到達時間差的定位算法設計[J].廣西民族大學學報:自然科學版,2012 (4):60-63.
[12]趙旭.基于無線傳感器網(wǎng)絡的移動機器人定位與導航系統(tǒng)研究[D].沈陽:遼寧科技大學,2012.
[13]茍勝難.基于改進的RSSI無線傳感器網(wǎng)絡節(jié)點定位算法研究[J].計算機應用研究,2012(5):1867-1869.
[14]黃光華.基于無線傳感器網(wǎng)絡的森林火災監(jiān)測系統(tǒng)的設計與研究[D].南昌:江西理工大學,2012.
[15]鐘智.具有移動節(jié)點的無線傳感器網(wǎng)絡定位算法和數(shù)據(jù)收集協(xié)議研究[D].長沙:中南大學,2012.
[16]鄭林.基于無線傳感器網(wǎng)絡的移動節(jié)點定位算法研究[D].沈陽:東北大學,2011.
[17]陳榮,單志龍.大規(guī)模水下無線傳感器網(wǎng)絡定位誤差抑制研究[J].計算機與現(xiàn)代化,2011(5):87-91.
[18]牛宇卿.基于無線傳感器網(wǎng)絡的無線糧情監(jiān)控系統(tǒng)的設計與實現(xiàn)[D].太原:太原理工大學,2011.
[19]顏文勝.無線傳感器網(wǎng)絡節(jié)點部署算法的優(yōu)化研究[J].計算機仿真,2011(4):126-129.
[20]佟玲.無線傳感器網(wǎng)絡應用平臺系統(tǒng)網(wǎng)絡層的設計與實現(xiàn)[D].長春:吉林大學,2011.
[21]陳妮.無線傳感器網(wǎng)絡的密鑰預分配管理方案研究[D].成都:電子科技大學,2009.
[22]傅思遙,潘秀琴,趙悅.一種基于室內(nèi)環(huán)境無線傳感器網(wǎng)絡的移動機器人定位法[J].中央民族大學學報:自然科學版,2009(1):57-63.
[23]端木慶敏.無線傳感器網(wǎng)絡節(jié)點定位算法研究[D].長沙:國防科學技術(shù)大學,2006.
[24]白波.無線傳感器網(wǎng)絡節(jié)點自身定位算法的研究[D].沈陽:東北大學,2008.
[25]陳紅亮.室內(nèi)無線傳感器網(wǎng)絡環(huán)境下移動機器人路徑跟蹤的研究[D].武漢:武漢理工大學,2008.
[26]楊秀萍,劉嵩巖.基于無線傳感器網(wǎng)絡的移動機器人定位導航系統(tǒng)[J].電子器件,2007(6):2265-2268.
[27]潘建國.傳感器定位節(jié)點的應用設計與實施[J].安徽工程科技學院學報:自然科學版,2007(4):72-75.
[28]俞黎陽.無線傳感器網(wǎng)絡網(wǎng)格狀分簇路由協(xié)議和數(shù)據(jù)融合算法的研究[D].上海:華東師范大學,2008.
[29]梁華為,陳萬明,李帥,等.基于無線傳感器網(wǎng)絡的移動目標導航方法[J].傳感技術(shù)學報,2007(7):1620-1624.
[30]劉寶棟.網(wǎng)格環(huán)境下無線傳感器網(wǎng)絡數(shù)據(jù)融合研究[D].太原:太原理工大學,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
