基于遙控的溫室噴霧機自適應控制系統設計與試驗
2018-04-12 00:52:40賈衛東歐鳴雄王浩宇
農機化研究 2018年4期
關鍵詞:信號
賈衛東,顏 杰,歐鳴雄,沈 躍,王浩宇,董 祥
(1.江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013;2.中國農業機械化科學研究院,北京 100083)
0 引言
與傳統種植方式相比,設施農業具有更顯著的經濟、社會和生態效益。其中,溫室發展迅速,產業日趨壯大,已然成為21世紀最具活力的農業新產業[1]。病蟲害防治作為農作物生產過程中的重要環節,離不開高效安全的施藥機械。目前,我國的溫室施藥機具在實現機械化、自動化和智能化方面還有些欠缺,溫室空間狹小,環境復雜,施藥機具操縱方便性差,絕大多數還依靠人工作業,不僅工效低、勞動強度大、費用高、而且存在較大的施藥安全隱患[1-3]。越來越多的國家已經在農業生產中使用溫室噴霧機器人,并且融合了變量噴霧技術和精確噴霧技術,不僅降低了勞動強度,而且達到了有效利用農藥及減輕環境污染的目的[4]。
在溫室生產中,安全、可靠、平穩的運動和準確的路徑導航是保證噴霧機器人完成施藥作業任務及達到較好施藥效果的關鍵。多年來,圍繞溫室噴霧機器人的運動控制問題,國內外學者進行了深入的研究,如采用軌道式技術[5]、電磁感應技術[6]、機器視覺技術[7-9]和激光技術[10]等實現定位導航。李良等設計了溫室軌道施藥機器人系統;宋健等設計了電磁誘導式噴霧機器人導航系統;李明等設計了基于視覺傳感器的定位系統;賈世偉等開發了基于激光測距儀的路徑導航方法。軌道式技術和電磁感應技術需要分別預先架設導軌、鋪設誘導線及磁標等,應用受限且成本高;機器視覺定位算法復雜,實時性差;激光技術定位電路復雜,成本較高。現有導航及運動控制技術存在實現困難、成本過高及容易發生誤操作等問題,所以在溫室中還遠遠沒有達到實踐運用的效果。
本文在溫室風送靜電噴霧機上,搭載了圖像傳輸系統,并設計了基于無線遙控與沿作物行中心線自適應行走相結合的實時運動控制系統。該系統可在人不進入溫室的情況下,根據實時傳輸的作業環境,實現噴霧機在溫室環境里安全可靠平穩的運行,且在施藥過程中始終與作物保持近似平行,避免了重噴漏噴等現象。
1 溫室智能噴霧機樣機
1.1總體結構
所研究的樣機是自主設計的溫室風送靜電噴霧機,包括移動底盤與噴霧系統,主要由施藥模塊、傳感模塊、控制模塊、動力模塊和電源模塊組成。其中,超聲波與車輪布置示意圖如圖1所示,總體結構如圖2和圖3所示。

1、2.前組超聲波傳感器 3、4.后組超聲波傳感器 5.避障停車超聲波傳感器 6、7.驅動輪 8、9.從動輪

1.攝像頭 2、5.前組超聲波傳感器 3、6.驅動輪 4.避障停車超聲波傳感器 7.從動輪 8.后組超聲波傳感器圖2 溫室噴霧機示意圖
施藥模塊包含藥箱、微型隔膜泵、電磁閥及噴嘴等。傳感模塊主要包括5個超聲波傳感器,分別安裝在噴霧機前方和兩側,前方傳感器用來緊急避障停車,兩側傳感器用來檢測車體位置狀態,以便于實現沿作物行中心線行走的自適應控制。控制模塊主要包括遙控與自適應的兩個控制單元且都是基于STM32設計的運動控制器。遙控單元對噴霧機實現遠程的運動控制,包括前進、后退、加減速、左右轉及啟停等功能,并且在作物行間直線行走時開啟沿作物行中心線行走的自適應控制功能。動力模塊主要采用四輪式結構,前兩輪為驅動輪,后兩輪為從動輪,所用電機為兩套步進電機及其驅動器,其轉向則是通過兩個電機的差速轉動實現。為保證平穩性,電機與驅動輪采用同步帶傳動結構。

圖3 溫室噴霧機樣機
1.2遙控與自適應控制調節系統及原理
遙控與自適應調節系統主要由控制模塊、檢測模塊及動力模塊協調完成。動力模塊采用86BYG型減速步進電機及配套的MA860H細分型兩相混合式步進電機驅動器,控制信號與步進電機采用共陽極接法,如圖4所示。

圖4 控制信號共陽極接法
控制信號包括遙控主機的發送信號和超聲波傳感器所測得的距離信號。從機控制器實時接收及處理控制信號實現噴霧機的運動,由從機控制器給驅動器發出脈沖信號與方向信號,就可以驅動步進電機和車輪以一定的速度與方向轉動。本樣機車速可以實現0~1.5m/s可調,加減速的步長為0.1m/s。
為了避免一些誤動作和偏差,脈沖信號(PUL)、方向信號(DIR)、使能信號(ENA)應滿足一定的時序要求。在實際運用中,本設計將使能信號完全懸空,如圖5所示。

圖5 控制信號時序圖
2 遙控與自適應實時控制系統設計
2.1硬件設計
溫室智能噴霧機遙控與自適應控制系統采用主從式控制方式,系統基于STM32開發而成,其硬件結構如圖6所示。
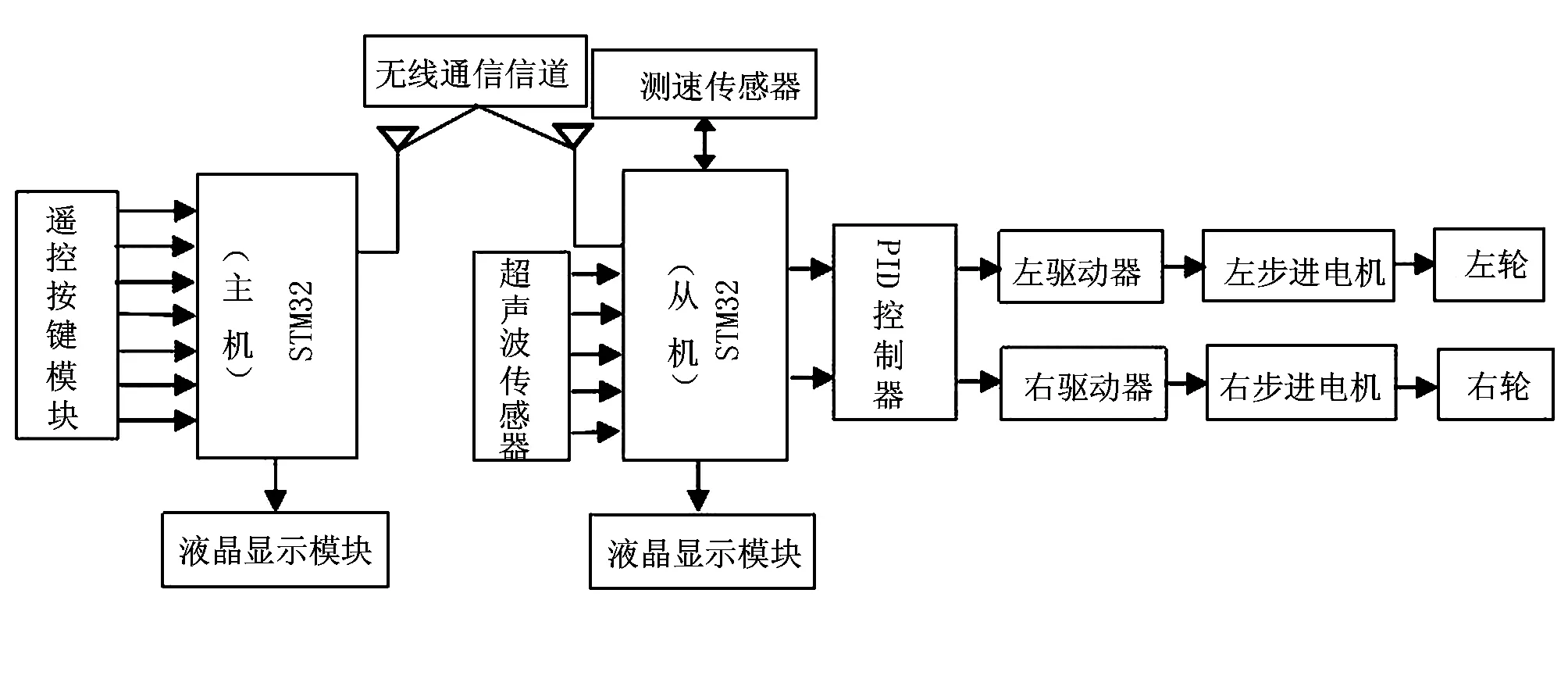
圖6 自適應實時控制系統硬件結構示意圖
主從控制器采用STM32F103ZET6的103系列芯片,是基于ARM Cortex-M3核心的32 位微控制器,512k片內FLASH并支持在線編程,64k片內RAM,7個定時器,3路AD輸入,2路DA輸出,高達72MHz的頻率,數據、指令分別走不同的流水線,以確保CPU運行速度達到最大化。超聲波傳感器采用防水型一體化超聲波探頭,探測范圍20~450cm,分辨率0.5cm,盲區20cm。無線模塊采用433M的 E30-TTL-100,其嵌入高速低功耗單片機和高性能射頻芯片SI4463,采用高效的循環交織糾檢錯編碼,抗干擾和靈敏度都大大提高;發射功率 100MW,具有無線喚醒功能。主機控制器按鍵模塊發出的指令通過無線模塊發送給從機控制器,接收到指令后控制步進電機轉動完成動作。此外,在作物行間直線行走時遙控從機開啟沿作物行中心線自適應行走功能,通過超聲波傳感器獲得的信號,經過從機控制器與PID控制程序處理后,發送出控制信號給步進電機驅動器,從而控制左右步進電機的轉速,改變左右輪的車速,調節車體狀態,使車體始終沿著作物行中心線行走。整個系統的供電由兩組24VDC蓄電池,各個模塊所需要的電壓可由24VDC電源升降壓提供。
2.2軟件設計
2.2.1遙控與自適應實時控制主程序
遙控與自適應實時控制系統軟件需要實現遙控主機信號的發送和從機信號的接收、超聲波傳感器距離信號的采集、步進電機控制指令的生成及輸出、工作參數輸入和系統工作狀態顯示等功能。控制器主程序流程圖如圖7所示。
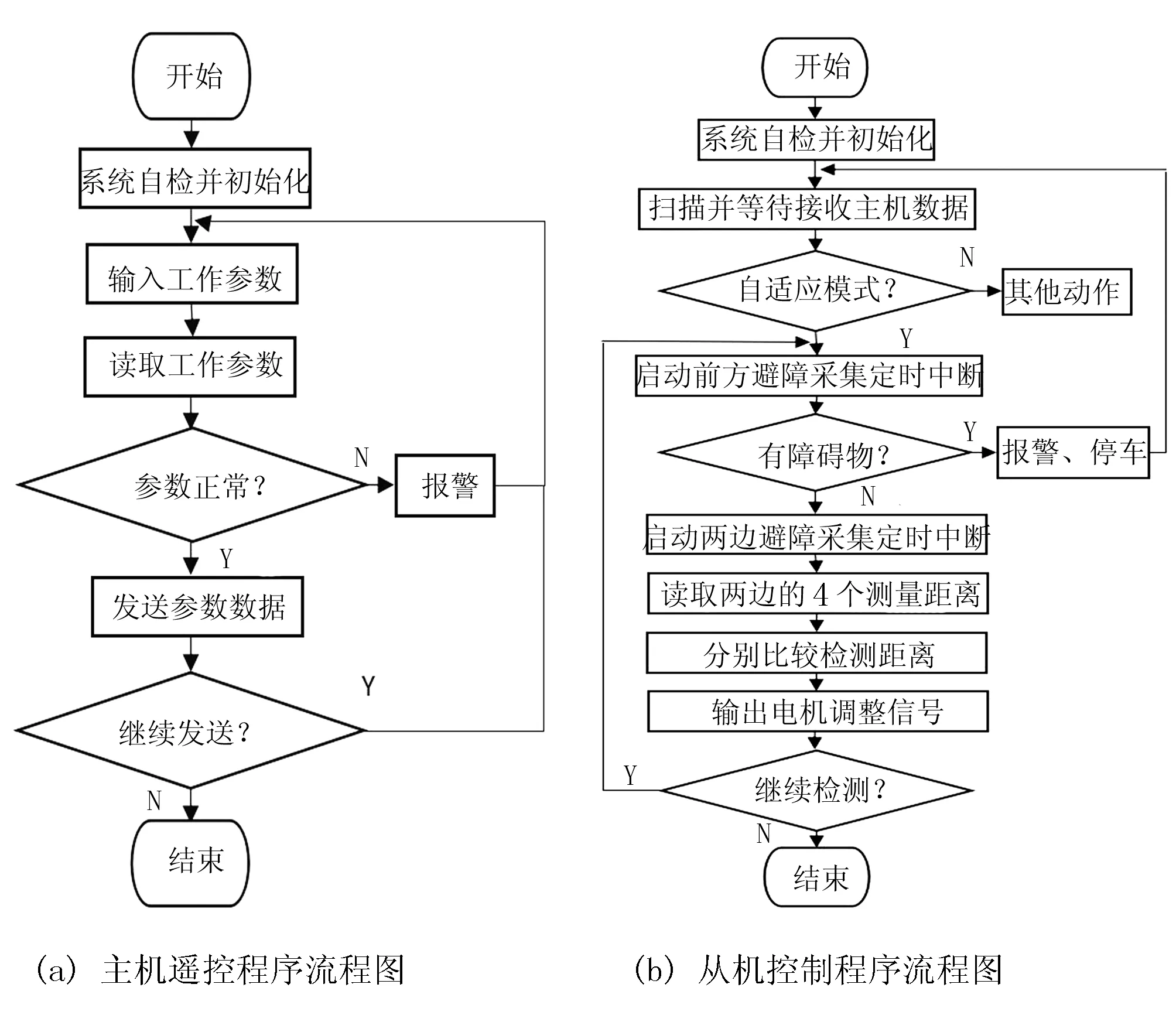
圖7 主程序流程圖
系統啟動后,開始自檢并初始化;通過遙控主機按鍵輸入工作參數后,系統讀取并判斷工作參數是否正常,不正常則重新輸入,正常則發送參數數據。從機控制器一直掃描并等待接收主機信號,如果接收到遙控參數信息,立即判斷是否開啟自適應模式,如果不是則完成指定動作;否則,就立即啟動前方避障傳感器采集定時中斷程序,判斷前方是否有障礙物,有則報警停車,無則啟動兩邊避障采集定時中斷程序進行兩邊4個距離的定時循環采集和更新。之后,從機控制器讀取最新的兩邊測量距離并先后進行比較,生成步進電機調整信號的指令,并輸出給驅動器。
在噴霧機作業過程中,需要超聲波傳感器實時檢測距離信號并反饋給控制器。本文采用了5個超聲波傳感器,為避免它們之間的相互影響,控制器將先后分別驅動5個傳感器進行距離檢測。首先,由前方傳感器5判斷前方是否有障礙物,當前方1m處有障礙物時,車速立即降為當前速度的1/2;當距離前方0.4m時,報警停車。若無障礙物,則分別啟動傳感器1、2、3、4檢測。此外,由于環境的干擾及超聲波傳感器本身的測量誤差都會對最終的測量結果產生影響,所以對超聲波傳感器的測量結果進行判斷、優化是十分有必要的。本文針對可能存在的測量誤差采用去最值平均法。即單個超聲波對同一位置處的距離連續檢測5次,得到的測量值分別記為X1、X2、X3、X4、X5,并進行比較排序,去掉最大值與最小值之后,對剩下的3個測量值進行求平均值作為一次測量結果。
2.2.3自適應實時控制方法
針對溫室道路有障礙物、打滑及運動誤差或凹凸型墻體等因素,設計一種沿作物行中心線自適應實時調節控制的行走方法,避免了傾斜碰撞且使噴霧機近似平行于作物,達到較好的施藥防治效果。自適應控制系統由5個傳感器實時檢測,并經過控制器運算比較,再給電機發出運動調整的控制信號。
步進電機所需的調節信號及控制算法可以通過分析不同運動狀態及超聲波測量結果綜合反向推導得出,如圖8所示。以左側情況為例分析行走方案及算法,假設溫室道路左側存在凸出墻體或障礙物及運動誤差或打滑引起的車體傾斜。

圖8 車體調整狀態變化示意圖
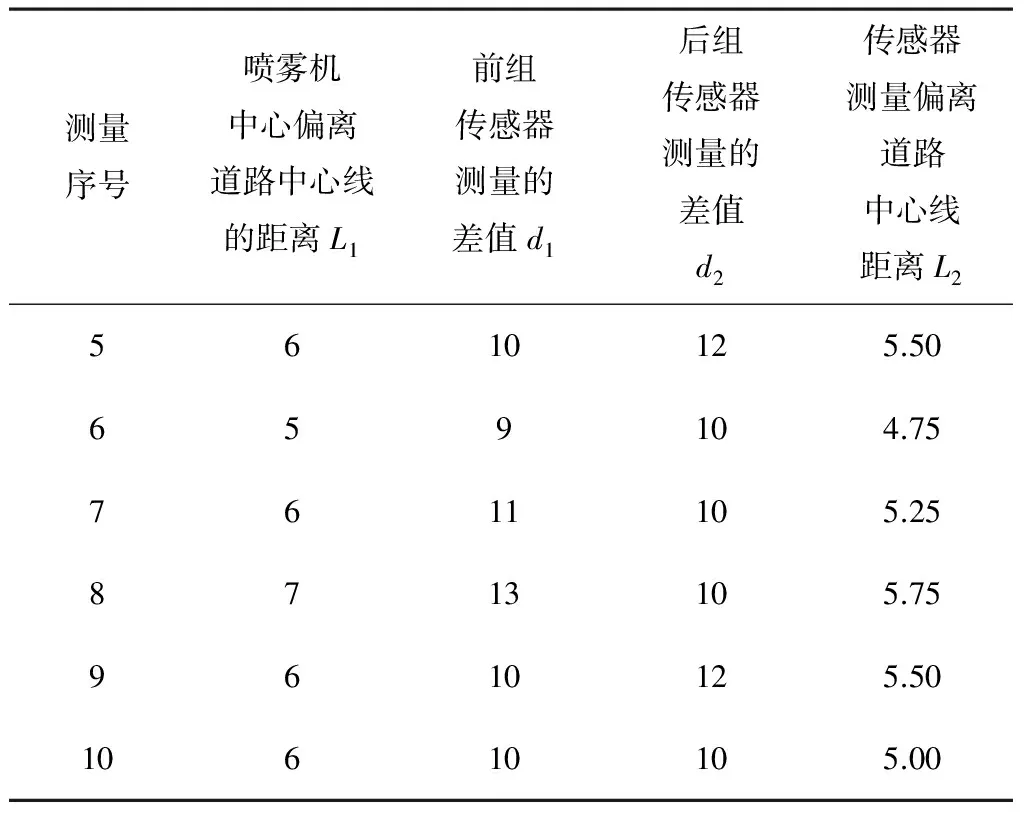
如圖8(a)中所示虛線為初始中心線1,D1、D2、D3、D4 分別表示傳感器1、2、3、4所檢測到的距離值。假設左邊有凸出墻體或障礙物,那么車體運動狀態只包括不做調整和向右調整(或向右調整后再向左調整達到穩定狀態)。結合標號1和2所示,左側的兩個傳感器(1、3)沒有同時檢測到,而是先后經過障礙物,故車體運動狀態不需要做調整。其中,當傳感器1經過時,檢測條件滿足D1 如圖8(a)中標號3所示,當傳感器1和3同時檢測到時,則需要向右調整(或向右調整后再向左調整達到穩定狀態),這一調整過程包括先調整到新的中心線2行走,然后再回到中心線1行走。對此情況做具體放大分析,如圖8(b)所示。調整過程分為前半段和后半段討論:前半段檢測條件滿足D1 基于有限元及試驗的發動機飛輪模態分 析 ……………………………………… 孟德健,張伯俊,董曉偉(32) 以上是針對一側進行討論,另一側則與之相反。為了簡化算法復雜程度便于實現實際應用,對以上判定條件進行綜合討論分類研究,可得到整體自適應實時控制系統的判別條件。 當D1=D2 時,車體運動狀態不做調整。當D1 若D3不等于D4,則向右調整(或向右調整后再向左調整達到穩定狀態),直至D1=D2。當D1>D2 時,若D3=D4,則不需要調整;若D3不等于D4,則向左調整(或向左調整后再向右調整達到穩定狀態),直至D1=D2。 由于以上判斷方法存在噴霧機在實際運動過程中循環走折線的問題,不能快速達到穩定的工作效果,在其基礎上引入了PID控制方法,設定期望值α及運動過程中實際測量的實時變化值L2,將L2與α的差值作為PID的輸入參數,輸出實時PWM脈沖,從而控制左右輪的速度,調整車身位置以保證沿中心線附近行走。 此外,由于實際工作因素的影響,為了避免噴霧機在沿作物行中心線行走的過程中發生頻繁調節的現象及不能滿足平穩性要求,對于以上判別條件中大小的判斷存在誤差(如檢測到的數值不可能完全相等),系統設定了調節閥值δ。例如,當-δ≤D1-D2≤δ時,判定D1=D2。 噴霧機的車體寬0.6m,走廊寬2.2m,行駛速度為0.5m/s,設定閥值δ=10cm。圖9為噴霧機在走廊中行走的情況。為了方便測量與記錄,在噴霧機尾部中心位置安裝了沙漏裝置,通過漏細沙的方法記錄運動軌跡,并且通過游標卡尺檢測每個測量點到道路中心線的實際距離,且當車體調整到沿中心線附近行走(即達到穩定狀態)時,讀取前后兩組超聲波所檢測距離的差值(即前組傳感器1和2的差值),則 d1=|D1-D2| (1) 后組傳感器3和4的差值為 d2=|D3-D4| (2) 對兩組差值取均值后,再計算出傳感器所測量的偏移道路中心線的距離,即 (3) 同時,與實際測量值進行對比。在調整階段,沿道路每0.5m設置一個測量點,在達到中心線附近時每2m設置一個測量點,共記錄10個測量點的數據,分別如表1和表2所示。 圖9 走廊環境試驗 由表1、表2可知:當噴霧機在沿作物行中心線行走時,能夠快速調整運動到中心線附近;當達到穩定狀態后,噴霧機中心距離道路中心線的距離平均值為6cm,最大值為7cm。根據前后兩組超聲波傳感器讀出的數據,計算出偏移道路中心線偏差值的均值為5.3cm,實際測量值與傳感器測量偏移值的誤差均值為0.7cm。根據設定的閥值δ=10cm,理論偏移中心線距離為5cm。所以,基本滿足控制要求及誤差要求。 表1室內場地偏差試驗數據 測量序號噴霧機中心距離道路中心的距離L測量序號噴霧機中心距離道路中心的距離L130220314485665768796106 表2穩定狀態下的試驗數據 Table 2Experimental data of the steady-state cm 測量序號噴霧機中心偏離道路中心線的距離L1前組傳感器測量的差值d1后組傳感器測量的差值d2傳感器測量偏離道路中心線距離L25610125.50659104.757611105.258713105.759610125.5010610105.00 1)提出了一種基于遙控的溫室智能噴霧機自適應實時控制系統及算法,利用超聲波傳感器實時檢測溫室道路兩邊距離,且根據設定的閾值進行比較,進而由控制器生成控制指令,使得噴霧機始終沿著道路中心線附近行走。該機器具有成本低廉、操作性好、安全可靠等特點。 2)室內場地試驗表明:開啟自適應控制系統后,噴霧機在偏離道路的情況下能夠快速調整運動到道路中心線附近,使噴霧機近似平行于作物,有利于達到較好的施藥防治效果并避免了重噴漏噴現象,且將偏離道路中心線的距離控制在7cm范圍內。 參考文獻: [1]王麗艷,邱立春,郭樹國.我國溫室發展現狀與對策[J].農機化研究,2008(10):207-208. [2]曹崢勇,張俊雄,耿長興,等.溫室對靶噴霧機器人控制系統[J].農業工程學報,2010,26(2): 228-233. [3]牛雪梅,高國琴,鮑智達,等.基于滑模變結構控制的溫室噴藥移動機器人路徑跟蹤[J].農業工程學報,2013,29(2):9-16. [4]莽璐,祁立鈞,冀榮華,等.溫室自動變量施藥系統設計[J].中國農業大學學報,2009,14(4): 114-118. [5]李良.溫室軌道施藥系統設計[D].太原:太原理工大學,2015. [6]宋健,張賓,張鐵中.電磁誘導式噴霧機器人導航系統[J].農業機械學報,2005,36(12):91-94. [7]李明,李旭,孫松林,等. 基于全方位視覺傳感器的農業機械定位系統[J].農業工程學報, 2010,26(2): 170-174. [8]沈明霞,姬長英. 農業機器人視覺導航技術發展與展望[J]. 農業機械學報,2001,32(1):109. [9]新忠,韓旭,毛罕平,等.基于最小二乘法的溫室番茄壟間視覺導航路徑檢測[J]. 農業機械學報,2012,43(6):161-166. [10]賈士偉,李軍民,邱權,等.基于激光測距儀的溫室道路邊緣檢測與路徑導航[J].農業工程學報,2015,31(13):39-45.3 室內場地試驗

Table 1Deviation data of indoor ground test cm
4 結論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18考試與評價·高一版(2020年6期)2020-11-02 02:45:24媽媽寶寶(2019年10期)2019-10-26 02:45:34中國生殖健康(2019年3期)2019-02-01 06:12:26鐵道通信信號(2018年11期)2019-01-19 01:15:08電子制作(2018年11期)2018-08-04 03:25:42鐵道通信信號(2018年2期)2018-04-18 12:18:10鐵道通信信號(2016年11期)2016-06-01 12:11:32鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25中國病理生理雜志(2015年8期)2015-12-21 12:38:06
