擠奶機器人的結構設計
2018-04-12 00:52:42楊存志吳澤全
農機化研究 2018年4期
關鍵詞:機械
楊存志,吳澤全,郭 洋
(黑龍江省農業機械工程科學研究院,哈爾濱 150081)
0 引言
隨著我國奶牛養殖向標準化、規模化、集約化、現代化發展,擠奶機械化程度高低已成為衡量規模奶牛場發展水平的重要考量指標。世界各國注重于奶牛健康、食品安全、動物福利和舒適度,為將擠奶作業創造出一個優良工作環境,普遍將高、精、尖自動化技術應用到奶牛擠奶領域。目前,歐、美等發達國家紛紛將高智能化擠奶自動化裝備引入奶牛擠奶系統中,并取得了較好的經濟效益和生態效益。目前,全世界范圍內全自動智能擠奶機器人研制生產技術主要被歐、美等發達國家所掌握。國內自主研發的同類產品基本還是空白,本項目在充分參考和消化國外最先進技術的基礎上,研究并開發出一套具有自主知識產權的全自動智能擠奶機器人。
擠奶機器人可實現最接近于奶牛自然狀態下的無人化擠奶作業。在養殖福利方面,將使奶牛更加舒適,有效控制牛奶品質和保證奶牛健康;在工作效率方面,增加每日擠奶次數,大多數奶牛可擠奶3次,從而提高產奶量,且利于實現奶牛場的高度自動化;在節本增效方面,每套設備平均每天能擠50~60頭奶牛,節省大量勞動時間和生產成本。
1 擠奶機器人整體結構的設計
機械結構總體方案中所設計的機械臂集成了大部分擠奶組件,將會產生很大的重力和傾覆力矩,因此機械臂在橫梁上的安裝方式與整機的材質顯得尤為重要。擠奶機器人整體結構設計的三維模型如圖1所示。
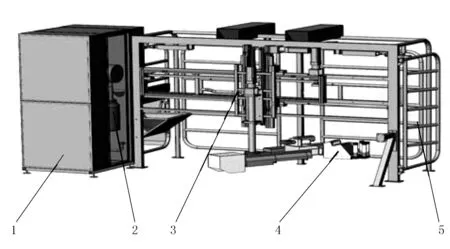
1.控制系統 2.擠奶和清洗系統3.三自由度運動機構 4.機械臂及末端執行器 5.擠奶箱
1.1擠奶機器人工作過程
由圖1可知:工作時,奶牛從右向左進入擠奶箱,在擠奶箱上方有檢測奶牛臀部位置的攝像機,初步確定奶牛乳房位置,控制系統發出指令,三自由度機械臂按照控制程序以安全軌跡運動到奶牛乳房附近;末端執行器中的圖像識別測距傳感器精確測定4個乳頭三維坐標,其后由清洗刷和擠奶杯組分別進行清洗、按摩、套杯、擠奶、脫杯、藥浴等一系列程序,擠奶結束機械臂返回清洗座。
1.2擠奶機器人控制原理
擠奶機器人是集成了機械、氣液、自動控制、傳感器、計算機視覺、軟件及數據庫等的一體化系統,采用模塊化設計,以主控計算機為核心,分為管理、識別、控制、數據采集等功能模塊。各模塊間接口采用網絡、CAN總線、RS232、USB、RFID和Zigbee等多種連接方式。整體原理框圖如圖2所示。

圖2 整體控制原理圖
1.3擠奶機器人總體尺寸參數
奶牛的體貌特性、生物學特征、管理和飼養方法等因素是擠奶機器人結構設計的依據和前提,決定著擠奶機器人的結構形式和工作方式。荷斯坦奶牛是我國主要的奶牛品種,分布在黑龍江、新疆、內蒙古及甘肅等地域遼闊的北方草原地區,其體貌特征如表1所示。
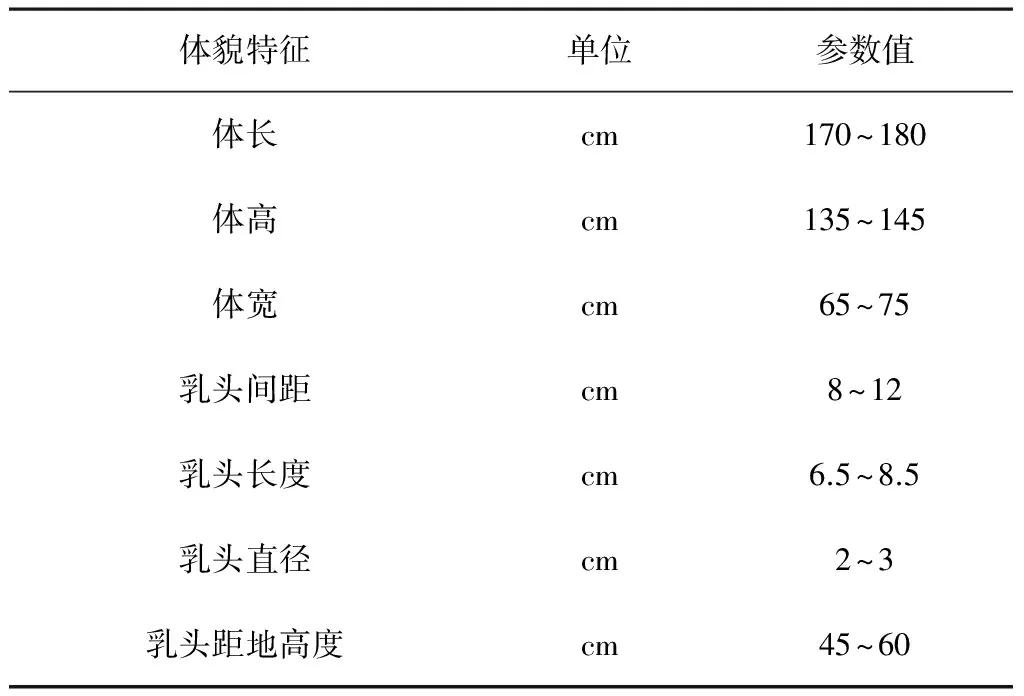
表1 中國荷斯坦奶牛體貌特征
通過中國荷斯坦奶牛的體長、體高、體寬、乳房的位置和乳頭的分布等體貌特征,確定以下參數:
擠奶箱長×寬×高為2.9m×0.93m×1.9m;機械臂橫向移動行程為0~1.35m;機械臂縱向移動行程為0~0.4m;機械臂垂直旋轉角度為0°~60°;擠奶杯組至旋轉軸距離約1.15m。
2 三自由度運動機構的設計
擠奶機械臂由三自由度運動機構作為驅動系統,包括X軸直線運動機構、Z軸直線運動機構、繞Z軸旋轉運動機構等3個部分組成,實現橫向、縱向、旋轉3個方向的同步或異步運動,從而完成以奶牛乳房乳頭為目標的空間連續運動,如圖3所示。擠奶機械臂以最小的機械結構和活動范圍實現了擠奶運動軌跡。
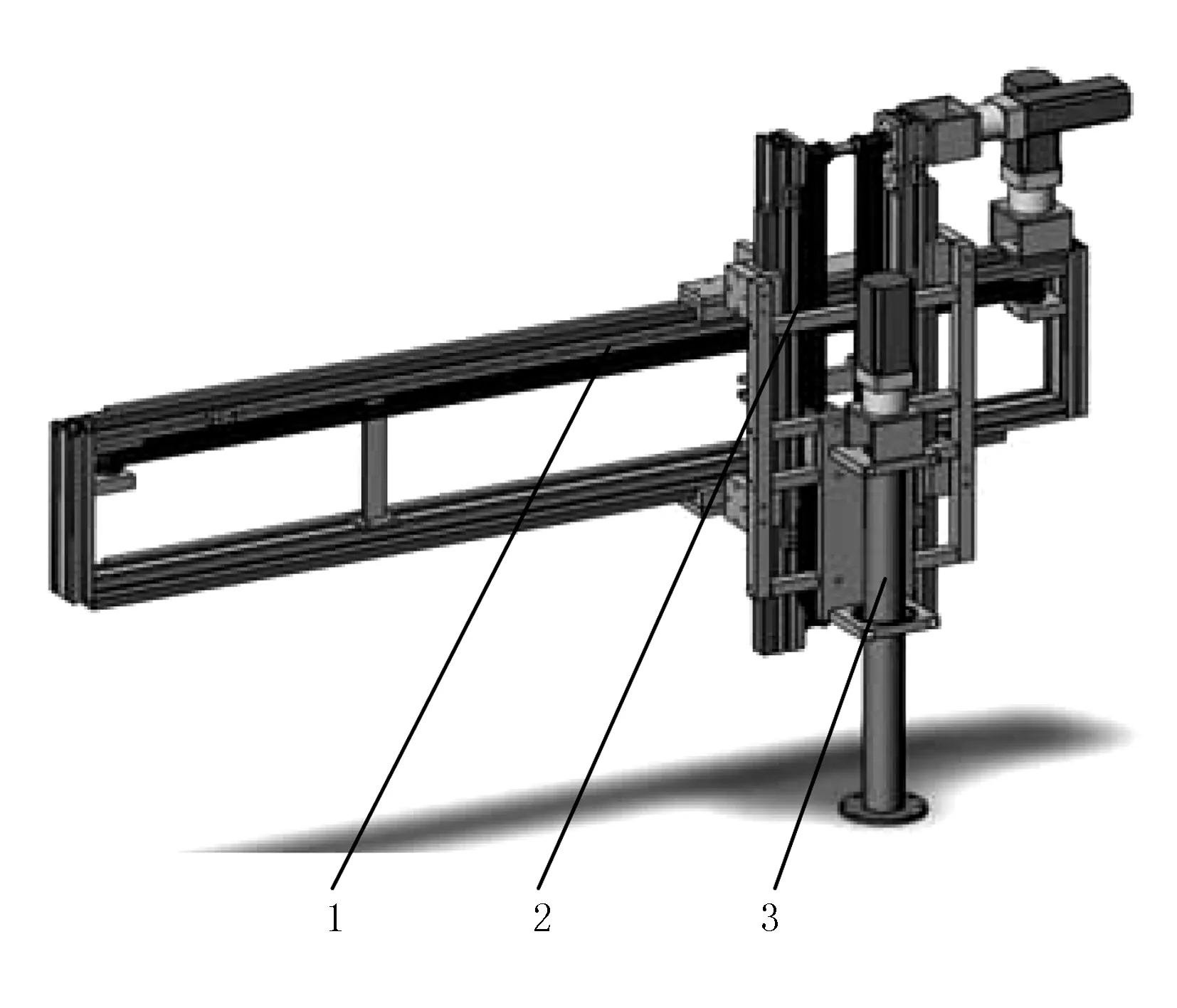
1.X軸直線運動機構 2.Z軸直線運動機構 3.繞Z軸旋轉運動機構
2.1X軸直線運動機構
X軸直線運動機構由伺服電機、機架、同步齒形帶、導軌及橫移結構組成。其工作原理如下:由橫移伺服電機驅動齒形帶水平運動,推動橫移機構,帶動Z軸直線運動機構的縱移機構來實現機械臂的的水平動作。該機構運動的距離受控制系統的限制,在位置傳感器或閉環信號等檢測下可以自動調節,行走合適的距離。
由1.3節可知:機械臂橫向移動行程為0~1.35m。由于皮帶太長,運動機構中皮帶張緊結構的設計成為了關鍵,直接影響到直線運動的精度。
同步帶張緊結構設計如圖4所示。將圓弧齒形壓塊壓在同步帶的一端,以頂絲固定,在同步帶的另一端同樣安裝;擰緊張緊螺釘,使張緊塊受力向張緊座移動,另一端也同樣操作,可以使皮帶越拉越緊,最終達到有效張緊的效果。
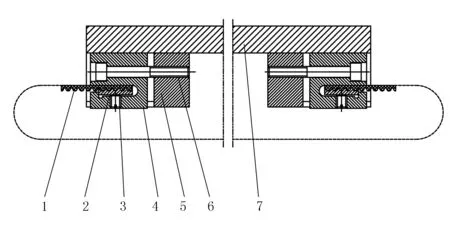
1.圓弧齒同步帶 2.齒形壓塊 3.頂絲4.張緊塊 5.張緊座 6.張緊螺釘 7.固定板
2.2Z軸直線運動機構
Z軸直線運動機構實現機械臂的縱向運動。該機構固定于X軸直線運動機構的橫移架構上,由伺服電機、機架、同步齒形帶、導軌及縱移結構組成,如圖5所示。

圖5 Z軸直線運動機構
為保證受力穩定,采用兩根同步齒形帶。其工作原理如下:由縱移伺服電機驅動齒形帶垂直運動,推動縱移機構,帶動繞Z軸旋轉運動機構的旋轉機構來實現機械臂的的垂直動作。該機構運動的距離受控制系統的限制,在位置傳感器或閉環信號等檢測下可以自動調節,行走合適的距離。
2.3繞Z軸旋轉運動機構
繞Z軸旋轉運動機構實現機械臂的旋轉運動,如圖6所示。該機構固定于Z軸直線運動機構的縱移機架上,由伺服電機、軸承及旋轉結構組成。擠奶機械臂固定安裝在旋轉機構底端,工作原理為伺服電機驅動旋轉軸,使旋轉機構帶動擠奶機械臂在水平面上形成扇形運動。

圖6 繞Z軸旋轉運動機構
以上3個橫向、縱向、旋轉運動機構的結合,實現了以奶牛乳房乳頭為目標的空間連續運動路徑。伺服電機的優點是精確度高、調速方便、閉環反饋信號及時準確、結構小巧緊湊、低噪音,且過載時能及時斷電,在外力作用下反方向運動,避免對奶牛進行傷害。
3 擠奶機械臂的設計
擠奶機械臂作為機器人的末端執行器,要完成最終的擠奶工作,如圖7所示。因此,它集成了圖像識別測距系統、擠奶杯組、擠奶清洗管路、脫杯裝置、乳頭清洗刷等部件。
在進行奶牛擠奶套杯前,對奶牛乳房的按摩和清洗是擠奶過程必不可少的重要環節。當末端執行器運動到奶牛乳房的前端時,安裝在機械臂下的氣缸推動清洗刷由圖7狀態1旋轉到狀態2的位置,此時圖像識別測距系統準確定位奶牛乳頭,清洗刷在三自由度運動機構的驅動下對奶牛的4個乳頭分別進行按摩清洗;清洗過程結束后,清洗刷又回到狀態1位置。

1.旋轉軸 2.清洗刷 3.檔污板4.機械臂構件 5.圖像識別測距系統 6.擠奶杯組圖7 擠奶機械臂
3.1乳頭清洗刷結構設計
圖8為清洗刷結構圖。由電機齒輪嚙合主動小齒輪,主動大齒輪嚙合從動大齒輪,使兩個毛刷實現轉速相等、方向相反的運動,傳動箱傳動比為1:1,兩個毛刷的重合部分約4mm。由于清洗刷在有水環境下工作,直流減速電機需要設計防水套9來進行保護。清洗刷主要零件采用尼龍材質,優點是防銹、質輕、成本低,如果發生故障可以整體更換。
直流減速電機參數如下:功率P=25W,額定轉速n=120r/min,額定轉矩T=3N·m,電壓24V。
3.2擠奶杯結構設計
擠奶機器人可以對奶牛4個乳房的產奶量、奶品質、病變等進行分別監測,每個擠奶杯都是獨立單元,因此擠奶杯的結構與通常的奶杯有所不同。擠奶杯結構如圖9所示。圖9中,固定座與固定套的接觸面為球形,固定座上系繩索與脫杯氣缸連接,擠奶時脫杯氣缸放松,整個擠奶杯吸附在奶牛乳房上與固定套脫離;脫杯時,擠奶杯在氣缸拉力下豎直立于固定套上。真空與大氣交替變化的氣管道,氣壓作用在奶襯上,產生一吸一松的擠奶動作。真空奶管道吸出的牛奶與真空混合輸送到下一單元。此擠奶杯整體結構緊湊,布局合理,功能完善,可以小批量生產,適合擠奶機器人使用。

1.毛刷 2.傳動箱體 3.主動大齒輪 4.主動小齒輪 5.傳動箱蓋 6.從動大齒輪 7.電機齒輪 8.電機 9.防水套

1.奶襯 2.擠奶杯體 3.杯托1 4.杯托2 5.固定座 6.固定套 7.真空奶管道 8.氣管道
4 擠奶箱的設計
擠奶箱是對奶牛進行擠奶、補飼精飼料的場所,由正進門欄、側進門欄、正出門欄、側出門欄和飼槽組成。進出門欄分別安裝在左右框架上,通過安裝在框架上方氣壓缸的伸縮進行開合。擠奶箱結構如圖10所示。
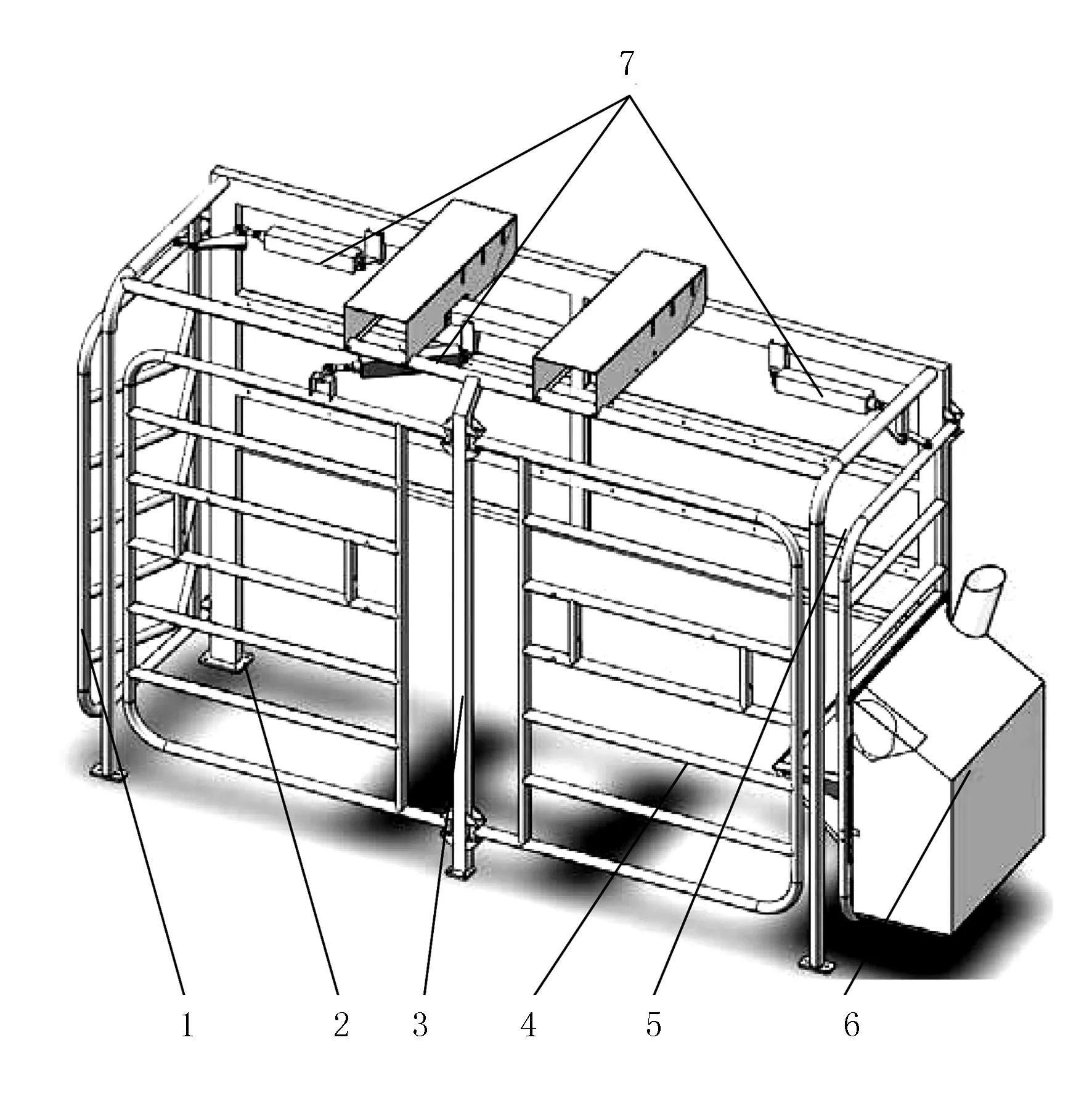
1.正進門欄 2.側進門欄 3.擠奶箱框架 4.側出門欄 5.正出門欄 6.飼槽 7.氣缸
為了方便奶牛的進出自由,營造友好自然的擠奶空間,綜合國外先進擠奶自動化裝備工作模式與設計理念,擠奶箱采用“步入步出式”設計,便于奶牛的自然、無障礙快速進出,擯棄人為驅趕對奶牛所造成的不良影響。
根據高產荷斯坦奶牛體型,擠奶箱內部空間足夠寬敞,給予奶牛完全自由的空間。同時,在前端設計了收放式飼槽(見圖11),安裝在正出門欄上。當奶牛進入后可以飼喂時,飼槽內氣缸動作,由狀態1變成狀態2,系統識別奶牛編號(ID),讀取上位機飼喂量數據和曲線,驅動內部管道中的電機轉動,流出一定量的精飼料到飼槽,使奶牛安靜的進食與擠奶;擠奶結束后,飼槽由狀態2變成狀態1,緩慢收入擠奶箱內部,出門欄打開,奶牛將被動或主動離開擠奶箱。一頭奶牛盡快地離開就能讓下一頭奶牛更快地進入,以實現每次擠奶節省10s或更多時間(奶牛從進入、擠奶到離開,一般花費7~10min),一天就能節省45min或者說可以多擠3頭奶牛,從而最大程度地提高生產效率。
在擠奶過程中的精飼料補飼主要有兩個優點:
1)通過培訓奶牛后,有利于促進奶牛進入擠奶箱,并利于奶牛在擠奶箱中的安靜擠奶;
2)在奶牛各泌乳階段,泌乳高峰發生的時期一般在產犢后4~6周,而食欲完全恢復則在產犢后8~10周,表明食欲的恢復要遠滯后于泌乳高峰,進而影響產奶性能。奶牛產犢后,可通過精飼料飼槽加喂適當的精飼料,從而為泌乳初期提供充足、豐富的能量來源,有利于促使產后奶牛泌乳高峰的盡早出現,保持全泌乳期有較高的產奶量。
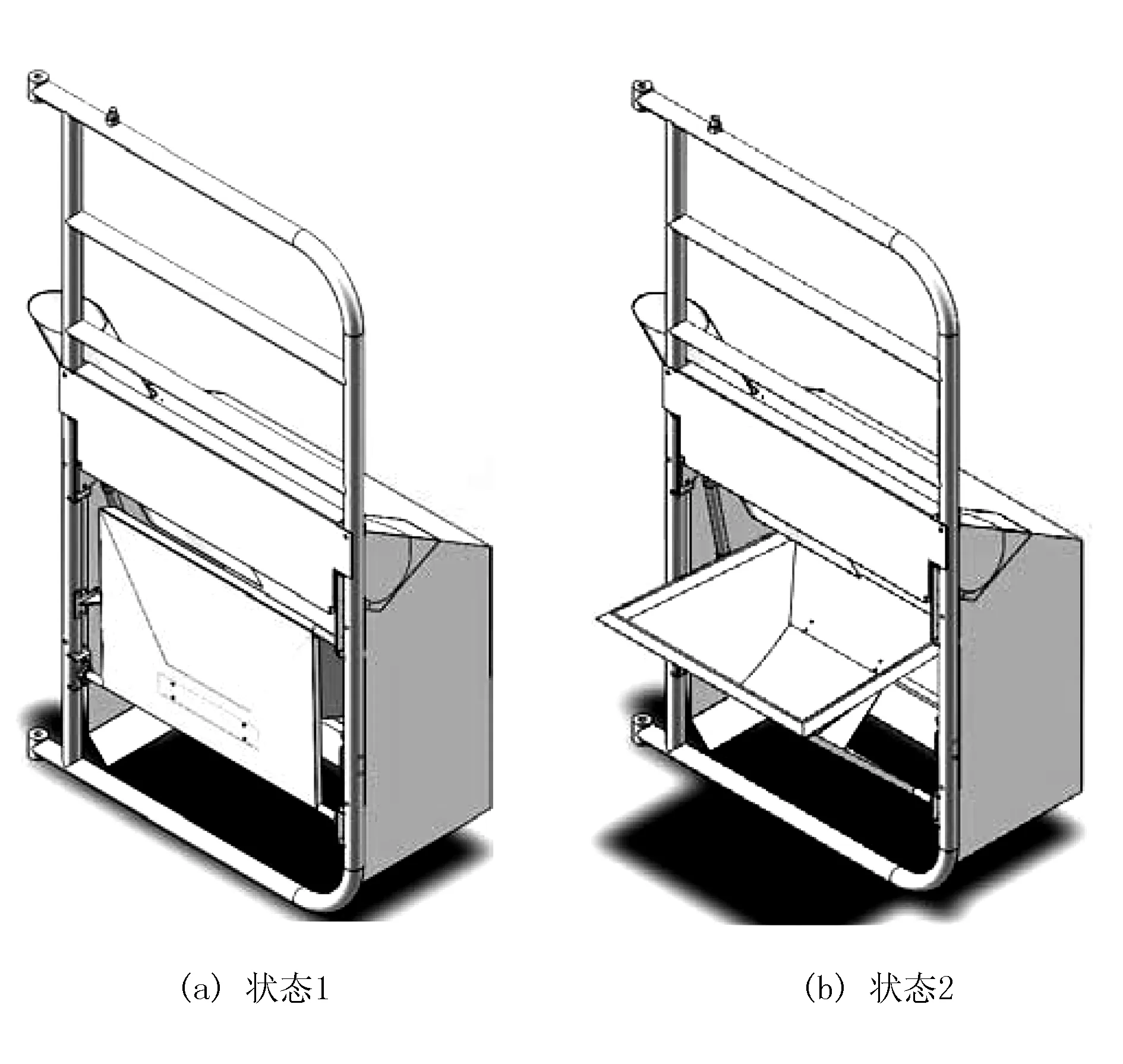
圖11 精飼料飼槽
5 樣機控制及試驗
擠奶機器人的執行機構由上位機發命令給PLC,再由PLC驅動伺服電機帶動機械臂運動,伺服電機選用FESTO的CMMP-AS系列電機,定位精度可達0.1mm。在調試過程中需要對電機參數進行設定,可定義參數包括定位精度、尋零方式、運行速度、行程范圍、數據采集通道和通信方式等。試驗中,當上位機通過圖像采集系統采集到奶牛乳頭定位位置后,將位置信息發送給PLC,PLC通過CAN總線通訊將命令發送給伺服電機并驅動機械臂和末端執行器運動到奶牛乳頭位置,進行套杯等擠奶程序,如圖12所示。試驗樣機通過實際測量,定位誤差在1mm以內。

圖12 試驗樣機套杯擠奶圖
6 結論
本課題研究的擠奶機器人在參考國外各類先進設備的基礎上,針對我國主產區奶牛特征,對擠奶機器人的驅動系統、三自由度運動機構、擠奶機械臂、擠奶箱、清潔機構及擠奶杯等機構進行了優化設計,并完成了第2輪樣機的制造。試驗驗證表明:各部件及整機的功能完全達到課題設計要求。
參考文獻:
[1]宋秋梅,馮欣,陶繼哲,等.擠奶機的組成及關鍵部件的性能分析與評價[J].農機化研究,2005(3):112-113.
[2]陳偉旭,金鹍鵬,馬君,等.擠奶機真空系統測試裝置的研究與設計[J].農機化研究,2012,34(1):123-125,130.
[3]劉俊杰,楊圣虎,蔡曉華,等.基于D-H法的擠奶機器人機械臂運動學分析[J].農業科技與裝備,2015(10):25-28.
[4]劉俊杰,楊圣虎,程睿,等.基于有限元法的擠奶機械臂ANSYS仿真[J].農業科技與裝備,2015(6):25-28.
[5]張博,陳雷.基于AT89C51的自動擠奶計量機檢測裝置的研制[J].自動化技術與應用,2013,32(2):72-75.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
