一壟雙行深施肥機的設計與試驗
2018-04-12 00:52:44吳雪梅張富貴符德龍何厚龍
農機化研究 2018年4期
關鍵詞:煙草
李 緒,吳雪梅,張富貴 ,符德龍,何厚龍,聶 堯
(1.貴州大學 機械工程學院,貴陽 550025;2.貴州省煙草公司畢節市公司,貴州 畢節 551700;3.貴州省煙草公司黔西南州公司,貴州 興義 562400)
0 引言
煙草是貴州的主要作物之一,種植模式一般采用單壟單行,起壟和施肥等作業依次完成。一方面,在貴州山區烤煙由坡地向平壩地、土煙向田煙轉移的背景下,該方式實際操作費工費時、勞動強度大、作業效率低,并且會增加機器進地次數,破壞土壤物理結構,使地面堅實度增加,不利于機械化推廣[1]。另一方面,該方式生產投入大,土壤利用率低,單位土地面積的經濟效益不高、煙葉質量不穩定。對機械化施肥水平不高的貴州來說,煙草施肥環節常常由人工施肥或簡單機械施肥,施肥方式的粗放和施肥量的不均常常導致煙草作物燒苗或營養缺失,肥效利用率低,長期會導致土壤肥力失衡和土壤板結[2]。化肥的淺施常導致化肥揮發、肥效利用率低,不利于作物根系對養分的吸收,達不到增產增收的效果。在已開展的精準施肥技術方面,主要是基于GIS處方圖的精準施肥技術研究,但對于貴州山區來說難以生成和共享精準處方圖[3-4]。
針對以上問題,項目組提出將一壟雙行種植模式、煙草深施肥技術和精準施肥技術應用于貴州煙區,以解決煙草種植起壟、施肥環節存在的問題。在此基礎上,設計了一款適用于貴州平壩地區的一壟雙行深施肥機械,并匹配安裝了精準施肥控制系統,使拖拉機行速與施肥量相關連,可以一次性起壟,同時對兩壟煙精準深施肥,實現農機與農藝的有機結合,如圖1所示。通過田間試驗驗證其可行性,以達到相應生產環節省工、降本、增效的目的。
1 一壟雙行深施肥機的設計
1.1整體結構與工作原理
機具主要由變速箱、機架、刀滾、起壟裝置、施肥裝置、肥箱、懸掛裝置、覆土輪等部件構成。機具與拖拉機通過三點懸掛裝置連接,拖拉機帶動機具前進且通過萬向節傳遞動力到旋耕刀軸并使其旋耕土壤。機具行走時,固定在拖拉機后輪上的速度傳感器將采集機具速度信號;控制系統則將機具行進速度與排肥直流電機轉速進行匹配,達到精準施肥的效果[5]。調節左右兩根排肥管的距離和施肥深度,排肥軸在直流電機帶動下進行排肥,同時機架后方的起壟板起壟并由連接在機架后方的可調拖板刮平壟頂,一次性完成旋耕、起壟及施肥作業過程。該機具結構簡圖如圖2所示。
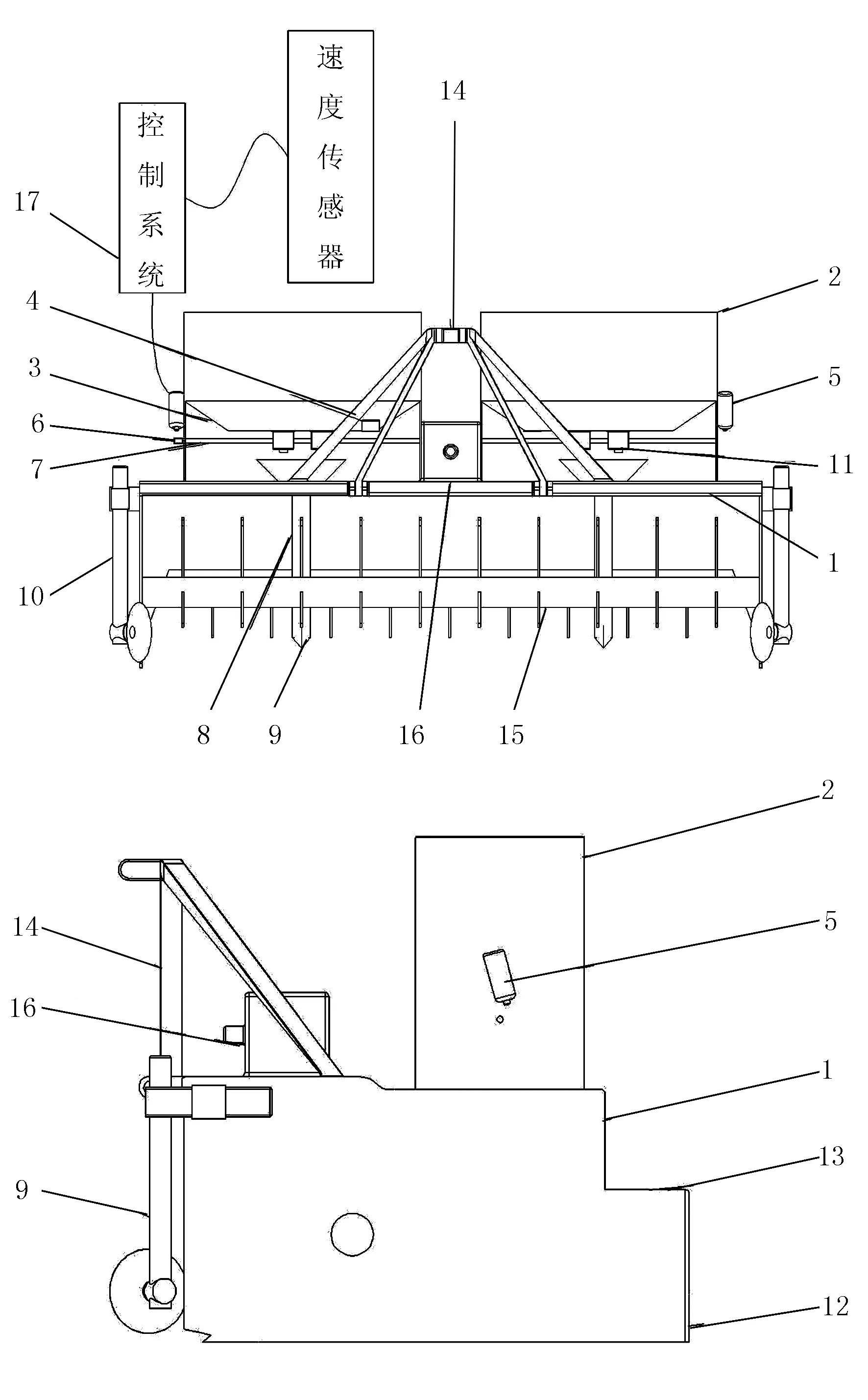
1.機架 2.肥箱 3.斜板 4.取肥口 5.直流電機 6.轉速傳感器 7.排肥軸 8.排肥管 9.開溝器 10.覆土輪 11.外槽輪 12.起壟器 13.可調拖板 14.懸掛架 15.刀滾 16.變速箱 17.控制箱圖2 一壟雙行深施肥機結構簡圖
1.2一壟雙行深施肥機的主要技術參數
一壟雙行深施肥機主要技術參數如表1所示。

表1 一壟雙行深施肥機主要參數

續表1
2 一壟雙行深施肥機主要部件的設計
2.1起壟成型裝置
起壟成型裝置主要由兩側呈對稱分布的起壟刮板、高度調節器和壟面刮土板構成[6],如圖3所示。機具前進時土壤被耕松,后方起壟刮板起壟并由壟面刮土板刮平壟頂,形成飽滿的壟體和平實的壟面,為后期的煙草種植和管理提供了條件。
該裝置應在確保農藝要求的前提下深耕和充分壟土,從而實現化肥深施。旋耕刀旋耕土壤深度會影響壟土量和施肥深度,其條件為
其中,H為旋耕深度(cm);L1為壟頂寬(cm);L2為機架長度(cm);W為邊緣寬度(cm);D為起壟高度(cm)。
根據上式和農藝要求,在施肥深度不變的情況下,壟底寬和壟頂寬越小越容易滿足足夠的壟土量,達到深施肥的效果。綜合以上因素,并結合試驗測試,取壟頂寬L1為130cm,L2為190cm,W為10cm,起壟高度D為30cm。根據上式,旋耕深度為H=23.68cm,取H=25cm,以滿足化肥深施條件。旋耕深度25cm可獲得30cm的壟高、25~30cm施肥深度。

1.高度調節器 2.壟面刮土板 3.起壟刮板
2.2排肥控制系統
2.2.1排肥系統的構成
傳統排肥裝置采用普通地輪驅動排肥軸,受土壤濕度等情況的影響,滾輪易下陷和打滑,傳動比波動大,可靠性差,對施肥均勻性和排肥一致性產生較大偏差[7]。基于以上情況,本文設計了排肥控制系統,確保排肥量的精確。
該系統主要包括控制系統、直流電機、12V車載直流電源及外槽輪排肥器等主要部分,系統結構簡圖如圖4所示。

1.肥箱 2.移速傳感器 3.拖拉機后輪 4.拖拉機驅動軸 5.24V直流電機 6.渦輪蝸桿 7.排肥器 8.排肥軸
2.2.2排肥系統控制流程
PLC控制電路通過采集機具行進速度和已設定的排肥量,經計算得出所需要的脈沖數,將這個脈沖數輸入直流電機驅動器,控制電機轉速,進而控制排肥量的大小,按需輸出肥料[8]。由于不同地域土壤肥力的不同,在觸摸屏上可選手動或者自動施肥模式控制施肥量大小。控制器采用西門子CPU 224xp型PLC,接由拖拉機蓄電池提供的12V直流電源[9]。施肥作業控制系統接線電路和流程如圖5所示。
排肥器是機具施肥的重要工作部件,在直流電機的驅動下將料箱肥料排出。由于現有排肥器比較成熟,故直接選用外槽輪排肥器,結構簡單,施肥均勻性較好,適用于排流動性較好的松散化肥和復合顆粒。


圖5 控制系統流程圖和接線圖
2.2.3施肥決策函數的確定
施肥決策函數的確定選擇在硬地面進行調試。煙草施肥量為675kg/hm2,根據煙草株距換算后選取2.8kg/30m進行調試驗證。作業時,機器前進速度一般不超過2m/s,將肥料用收納袋收集稱重并測出機具平均移速,反復調整電機轉速,以施肥誤差小于5%(2.66~2.94kg)為指標得到22組不同時施肥量數據,以及施肥決策函數y=3.16443-0.65469x+0.45727x2-0.11684x3(見圖6),并輸入PLC。


圖6 施肥決策函數的確定
3 田間試驗與結果
3.1試驗地條件
為檢驗樣機作業性能,于2016年6月20日在貴州省畢節市黃泥塘煙草基地進行起壟施肥測試。試驗區面積約1 400m2,測區為無茬田地。分別隨機取測區上、中、下層土壤各兩處,進行土壤含水率測定,如圖7所示。
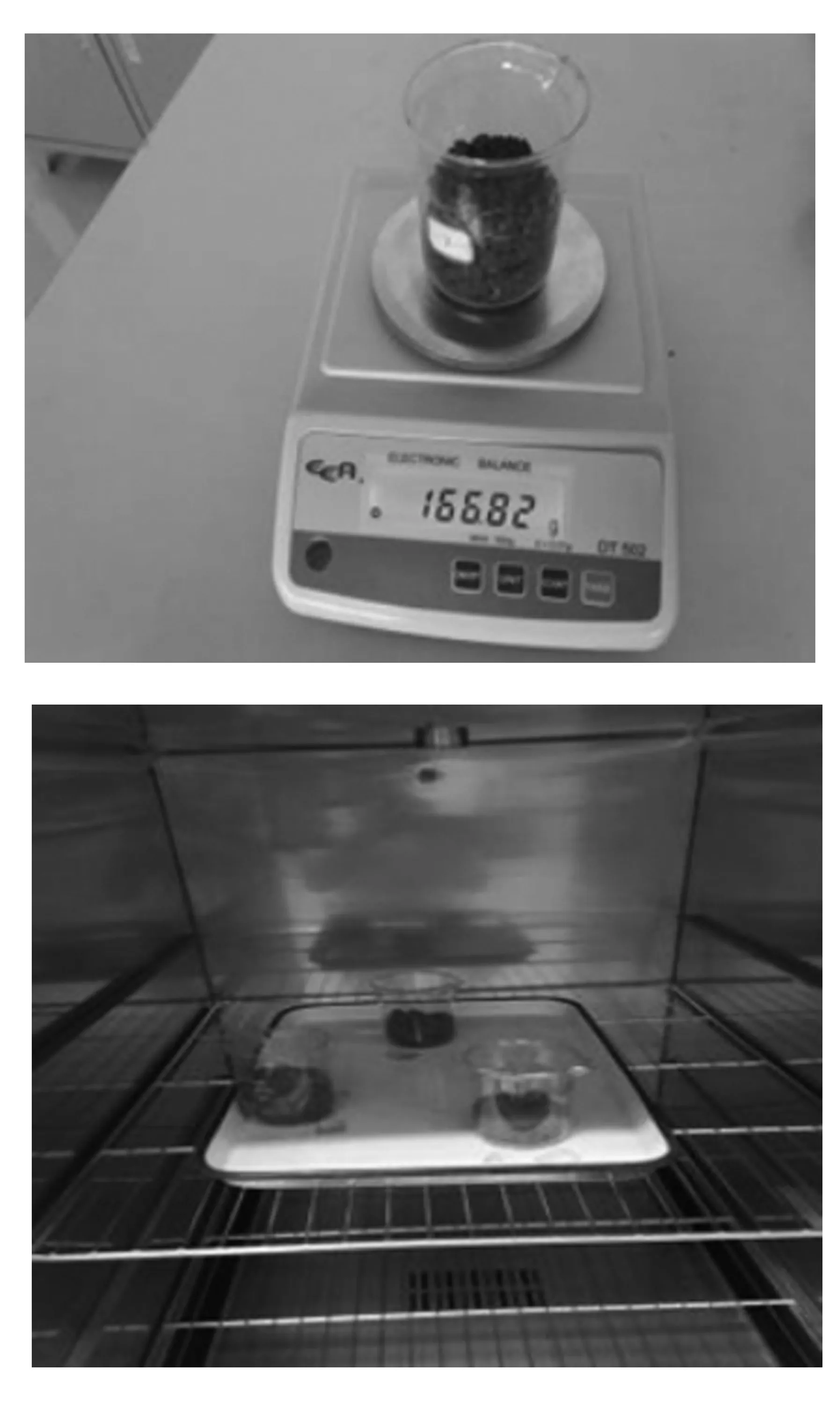
圖7 土壤含水率測量
測量方法是用燒杯盛適量樣本,用電子秤分別稱量烘干前后土壤的質量,計算土壤絕對含水率,即

式中m1—烘干前土樣及燒杯質量(g);
m2—烘干后土樣及燒杯質量(g);
m—烘干后燒杯的質量(g)。
經計算,土壤耕層平均絕對含水率為17.46%,適合起壟與施肥的作業環境。
試驗用肥為無機復合肥,采用耕王RM-804拖拉機懸掛式起壟施肥機測試起壟施肥參數。樣機試驗現場如圖8所示。

圖8 樣機試驗現場
3.2試驗設計與方法
試驗前使用石灰粉劃分4處測區范圍。依據國家標準《GB/T5262-2008農業機械試驗條件、測定方法的一般規定》,在每個測區內隨機選擇5個點作測點。調整機具至煙草種植要求,以小于7km/h的速度前進,同時開啟觸摸屏自動施肥模式。由于起壟和施肥同時進行,試驗前后稱重肥料并記錄差值。在每個測區測點處切開壟的斷面,用卷尺和水平儀分別測量壟高、壟頂寬、壟基寬和施肥深度及施肥寬度。
3.3試驗結果及分析
3.3.1壟高、壟頂寬及壟基寬
根據煙草種植標準要求,起壟形狀為等腰梯形,調節壟高為30cm,壟頂寬為130cm,壟基寬為170cm。農藝要求為以上各項標準要求的±10%以內為合格。按下列關系式,分別計算壟高、壟頂寬、壟基寬變異系數,即
式中V—壟高、壟頂寬或壟基寬變異系數(%);
S—壟高、壟頂寬或壟基寬標準差(cm);

Qi—壟高、壟頂寬或壟基寬每次測量值(cm);
n—各指標測點數。
試驗結果如表2所示。壟高、壟頂寬、壟基寬標準差分別為1.80、1.94、1.38cm,變異系數分別為6.4%、1.5%、0.7%,合格率分別達到92%、93%、98%,實際試驗效果壟型較好,壟體飽滿,壟面平實,完全滿足起壟農藝要求。樣機在試驗過程中由于受到山地地面不平整因素的影響,故導致壟高變異系數偏大。壟基寬的變異系數略好于壟頂寬,其原因是在某些硬地段旋耕刀旋土量不足導致壟頂土量不足。
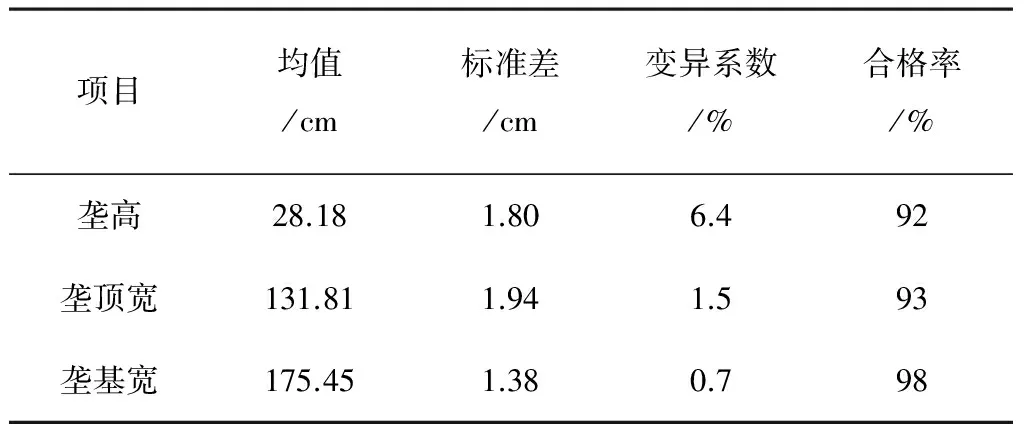
表2 一壟雙行深施肥機起壟參數
3.3.2施肥偏差及效率
施肥均勻度測試在硬地面測試,地面鋪設薄膜,機具調至適當高度以不同的速度反復行走4次,每個行程隨機選取穩定區內的5個點進行均勻度測量。通過試驗,測得施肥均勻性變異系數為12.28%,小于《貴州煙草農機評價指標體系》所規定的40%,性能達標,并且沒有斷條產生。這說明,整個控制系統準確度高,穩定性強。
施肥效率和施肥偏差的測定在試驗田各測區進行,對每個測區計時并稱量施肥前后肥箱內的肥料差值,得到各測區實際施肥量。田間實驗數據如表3所示。由試驗結果可知:該機具施肥效率高,施肥量偏差最大為4.58%,施肥精準度高,完全符合農藝農藝規程。
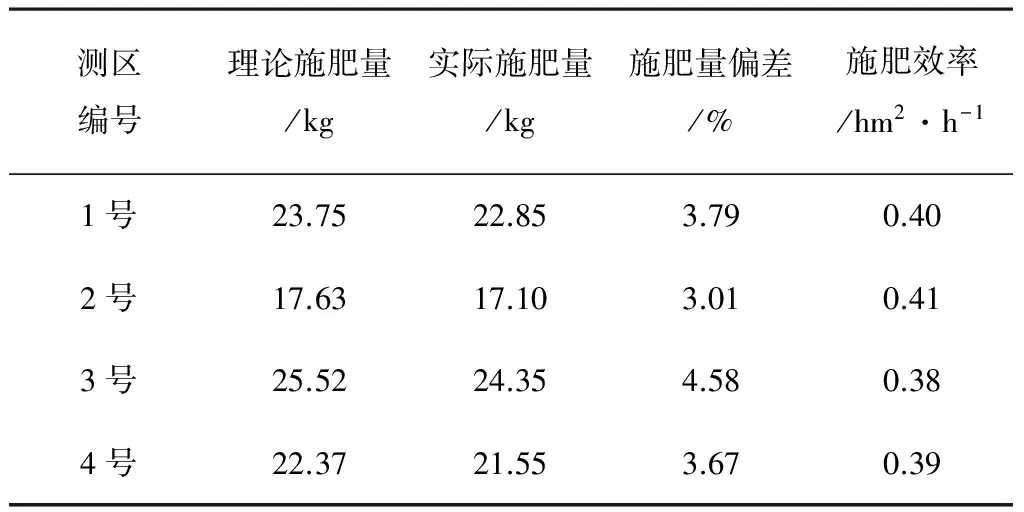
表3 一壟雙行深施肥機田間施肥測試參數
4 結論
1)設計的一壟雙行深施肥機配置了精準施肥控制系統,可一次性完成起壟和精準深施肥作業,系統穩定,作業過程中無斷條現象,滿足農業生產中的施肥精度要求。
2)一壟雙行深施肥機的壟高、壟頂寬和壟基寬符合煙草農藝要求,旋耕深度至少25cm,可滿足深施肥要求。
3)田間試驗表明:該機具起壟效果好,合格率高,三項指標變異系數均符合煙草作業起壟要求。施肥量偏差最大為4.58%,小于煙草行業標準的8%,施肥效率最高達到0.41hm2/h。
參考文獻:
[1]付乾坤,薦世春,呂愛民,等.玉米玉米滅茬起壟施肥播種機的設計與試驗[J].農業工程學報,2016,32(4):9-16.
[2]遠鵬,龍慧,劉志杰.我國施肥技術與施肥機械的研究現狀及對策[J].農機化研究,2015,37(4):255-260.
[3]李慧,佟秋成,陳魁,等.分層側深施肥播種機的研發[J].中國農機化,2013,35(5):105-108.
[4]許鑫,張浩,席磊,等.基于Web GIS的小麥精準施肥決策系統[J].農業工程學報,2011,27(2):94-98.
[5]古玉雪,苑進,劉成良,等.基于模糊系統的開度轉速雙變量施肥控制序列生成方法[J].農業工程學報,2011,27(11):134-139.
[6]何進,李洪文.1QL- 70型固定壟起壟機設計與試驗[J].農業機械學報,2009,40(7):55-60.
[7]蔣春燕,耿端陽,孟鵬翔,等.基于電動驅動的玉米精量播種機智能化株距控制系統設計[J].農機化研究,2015,37(5):100-104.
[8]侯蕊,朱瑞祥.變量撒肥機設計參數研究及控制系統設計[J].農機化研究,2015,37(4):114-116.
[9]邵利敏,王秀,劉曉穎,等.基于PLC的變量施肥控制系統設計與試驗[J].農業機械學報,2007,38(11):84-87.
猜你喜歡
奧秘(創新大賽)(2023年3期)2023-05-06 01:48:20
中國煙草學報(2019年5期)2019-11-14 07:54:12
首都公共衛生(2019年5期)2019-05-21 01:08:34
浙江中西醫結合雜志(2017年2期)2017-01-12 18:23:59
新聞傳播(2016年3期)2016-07-12 12:55:34
當代化工研究(2016年9期)2016-03-20 16:22:08
自動化博覽(2014年6期)2014-02-28 22:32:15
聲屏世界(2014年6期)2014-02-28 15:18:09
西南學林(2013年2期)2013-11-12 12:58:54
中國煙草學報(2012年5期)2012-04-12 06:21:18
