淺析輪式移動機器人與四翼無人飛行器
2018-04-13 03:47:50王荷
數字通信世界 2018年2期
王 荷
(沈陽市第二十中學,沈陽 110002)
1 輪式移動機器人
1.1 輪式移動機器人簡述
輪式移動機器人是出現較早的一種機器人,主要通過傳感器感知外界環境,控制系統作為控制中心對機器人的行為進行自動控制,并通過遙控操作器遙控,它融合了微電子技術、信息與通信技術、機器人技術等,能夠適應復雜的工作環境,既可以聽從人類的指示而進行操作,也可以根據提前在其系統內設定的程序進行運行,是一種自行執行工作的機器裝置。它在某些特定的工作場合能幫助或代替人類的工作,例如在工業生產線上、醫療領域或者危險的環境。
1.2 輪式移動機器人的發展
移動機器人是在上世紀中期第一次出現在人類視野,起初是為了完成在月球表面的探測,美國的“探測者”3號通過地面的遠程遙控,實現了在月球上挖溝及其他任務。后蘇聯實現了在無人駕駛的情況下,將“登月者”20號安全著陸,而且順利的帶回了月球表面的土壤、巖石樣品。而為了適應各種人類難以完成的工作,移動機器人的使用越來越廣泛,例如適合海洋開發及探測的水下機器人、適應原子能利用的極限機器人、工廠自動化機器人等等。不同的輪式機器人具有不同的特點,適合不同的工作環境,輪式移動機器人有兩輪式、四輪式、履帶式、全方向式等。基于履帶式移動坦克機器人牽引力良好,地面承載壓力低,可以在崎嶇的地面拿起被操作對象;三獨立馬達100mm全向輪機器人,通過安裝的全方位編碼器及微控制器,能實現在不改變方向的情況下,只改變每個車輪的方向和速度就可以向各個方向移動,且這種機器人上配備傳感器使其適用于監視和運輸。可以說不同的輪式移動機器人由于其應用環境和應用方向的不同使其移動方式、研究方向差別很大。
1.3 輪式移動機器人的工作原理
輪式移動機器人按車輪的數量可分為二輪、三輪、四輪、六輪及多輪機構,不同的機構具有不同的特點及設計原理。例如二輪機構結構較為簡單,但其在靜止或速率較低時很不穩定,而三輪機構可實現零回轉半徑,四輪機構因其結構使其運動較為穩定。
對于輪式移動機器人來說,設計的關鍵包括如何設計合適的機器人的體系結構,機器人感知并接受外界信息的方式,通過何種方式控制移動機器人使其移動及機器人的路徑規劃。對于機器人的體系結構,根據機器人的感知外界環境、分析決策等不同的功能將其分為分層遞階結構、行為系統、黑板系統三種系統結構。信息感知是指機器人通過各種傳感器感知外界并接受信息,包括激光掃描、攝像機、壓敏傳感器、聲音傳感器、紅外傳感器等,主要在機器人行進過程中對障礙物進行檢測。實現機器人的控制則是根據機器人幾何中心或輪軸線中心的時間微分方程的運動學模型進行建模,然后結合傳感器接收到的信息進行定位,通過神經網絡的學習和容錯能力對機器人進行控制,移動機器人的控制系統是其執行結構,對機器人能否準確的完成任務起著關鍵性的作用,而機器人的控制系統是由輪式移動機器人的本體結構、控制方式及所要達到的功能決定。路徑規劃則是使輪式機器人能夠自主運動的關鍵。
2 四翼無人飛行器
2.1 簡述四翼無人飛行器
無人機是指可以自備程序自主飛行或通過遙控飛行的不載人飛行器,它利用空氣動力來克服自身重量,且本身具有動力裝置,可一次性或多次回收利用。無人機機動性高,隱蔽性好,可以執行多種任務并且生存能力強,因此受到各國廣泛的關注及重視。四翼無人飛行器是無人機中的一種,它以四個旋翼作為動力裝置,能進行垂直起降,它的四只旋翼分別對稱安裝在飛行器的前、后、左、右四個方位作為飛行的直接動力源,這四個結構和半徑都相同的螺旋槳位于同一平面高度且呈螺旋交叉,其中位于不同直線的兩對旋翼分別沿順時針和逆時針方向旋轉。四翼無人飛行器從剛誕生至現在,因其在民用領域、軍事領域、航空領域等都有廣泛的應用前景,因此一直是各國研究的熱點。
2.2 四翼無人飛行器的發展
20世紀初,法國科學家制造了一架旋翼式直升機,這架直升機體積小,而且沒有駕駛員,但通過多次嘗試,最終并沒成功,但為后面飛機的發展奠定了基礎。在接著的很長的一段時間里有很多科學家都嘗試改進四旋翼飛行器,但并沒有成功。而二十一世紀以來,計算機技術有了很大的發展,同時各種傳感器相繼出現使得四翼飛行器再次進入人們的視野。而現在四翼無人飛行器由于其體積小,成本低,且在對如室內、叢林等進行監測,因此其在無論是軍事方面、娛樂領域,還是民用方面的應用前景都很廣闊。目前四翼無人飛行器可以在具有簡單約束的環境中實現自主飛行,但如何在復雜的環境中實現自主飛行仍是各國研究的重點。在2007年麻省理工研制的四翼飛行器可以通過激光掃描對周圍的環境進行感知,然后接受信息后重建并自主規劃路線,實現了對運動車輛進行檢測與追蹤。
2.3 四翼無人飛行器的工作原理
傳統的飛機是通過舵機使螺旋槳的槳距角改變而改變飛機的姿態和位置,而四翼無人飛行器則是通過改變四只旋翼的轉速,使升力發生變化從而控制飛行器的起降。但以這種方式使升力發生變化而產生的動力并不能支持飛行器長期飛行,所以為了使飛行器實現長距離飛行,就必須存在一種控制方法可以長期形成動力。當四個旋翼旋轉的轉速相同時,通過各個旋翼旋轉方向或速率的不同,可以相互間平衡了反扭力矩,以使飛行器實現靜止、側翻、前后、偏航等各種飛行動作。如圖1為四翼無人飛行器的基本結構圖:
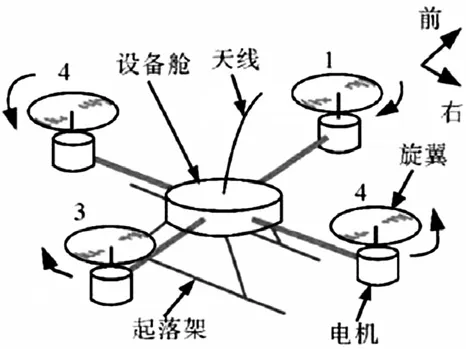
圖1
四個旋翼位于十字形機體的四個頂點位置,1、3旋翼為順時針旋轉,2、4旋翼為逆時針旋轉,當2、4旋翼轉速不變,而1、3號旋翼轉速增加或減小時,可以實現無人機的偏航;而當1、3號旋翼速度不變,2號旋翼轉速減小,4號旋翼轉速增加,無人機將向右飛行,反之2號旋翼轉速增加4號減小,則向左飛行;當四個旋翼轉速相同并使產生的合推力與機體重力相同,則無人機將在空中的某一高度呈相對靜止的狀態。這是四翼無人飛行器實現飛行動作的基本原理,在飛行過程中會通過傳感器實時感知外界環境變化傳給控制系統,控制系統將接收到的信息進行計算、分析,再將信息反饋,從而控制飛行器飛行、加速、避障。
3 輪式移動機器人與四翼無人飛行器優缺點分析
輪式移動機器人與四翼無人飛行器都屬于智能化的機器人,它們是科學進步的標志,也使人類生活方式有了很大的改變。輪式移動機器人主要用于地面,通過自主的地面運動去實現目標,而四翼無人飛行器則主要在通過空中飛行去完成任務,它們所處空間的不同,任務目標不同,導致它們自身結構有很大區別,功能方向有很大的不同。它們同樣是計算機技術與機械、電子、信息技術等的結合,通過傳感器感知外界,控制系統自主決策或人為控制,不同的應用方向使得它們的優缺點也不同。
輪式移動機構是在救災機器人中最為常見的一種,這種機器人一般機構較為簡單,運動速度快而工作效率高,控制方面通過簡單的編程就可以達到高的可靠性,因此控制較為方便,同時對能量的利用率高,機動性能好,而且在很多方面可以借鑒較為成熟的汽車設計技術,但其適應能力和越野性能較差。輪式移動機器人在移動過程中,因其只可固定在同一平面上而難以上下調整,所以導致其適應力較差,使其存在一定的局限性,在通過不光滑的地面時運動能力受到了限制,尤其是在如沼澤、沙地、雪地這種軟性地面時就容易打滑甚至沉陷。而四翼無人飛行器,重量輕,飛行速度可達每秒幾米到幾十米,因其體積小,可以鉆到建筑物或洞穴里,隱蔽性強,可以在多空間使用。四翼無人飛行器結構簡單,成本低,在執行偵察任務時,即使在復雜的環境也可以對細小的環境進行勘察并將目標的準確實時的信息反饋回來,因此在環境檢測、巡視、測繪、交通道路監控、航空攝影、搜救等方面都有很大的應用前景。
4 總結語
輪式移動機器人與四翼無人飛行器都是高科技下的產物,也是人類科技不斷進步的標志,它們都為人類生活帶來了很大的便利和改變。美國國家科學委員會曾預言:“20世紀的核心武器是坦克,21世紀的核心是無人作戰系統。”智能化的機器人為人類參與到人類生活的方方面面,但盡管已經有了很大的發展與進步,但還是存在一些沒有攻克的難題亟待解決,相信未來它們會為我們帶來更多的便利。
[1] 柳洪義,宋偉剛.機器人技術基礎[M].北京:冶金工業出版社,2002.
[2] 王樹剛.四旋翼控制問題研究[D].哈爾濱工業大學,2006.
[3] 祖莉,王華坤.智能移動機器人運動控制系統及算法的設計[J].機器人技術與應用.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
