復雜背景圖像中垂直伸縮式刀閘狀態識別研究
2018-04-23 12:09:20李保坤馬玲官譚守標
自動化儀表 2018年3期
關鍵詞:區域
吳 寬,李保坤,林 師,姜 文,馬玲官,譚守標
(1.海南電網有限責任公司,海南 海口 570203;2.安徽大學電子信息工程學院,安徽 合肥 230601;3.安徽南瑞繼遠電網技術有限公司,安徽 合肥 230088)
0 引言
為了實現對刀閘狀態的自動檢測,國內外出現了許多檢測方案。這些方案基本上可以歸納為兩種:一種是對電路內部進行改動,增加傳感器或者信號燈[1];另一種是基于數字圖像處理的方法,例如機器人巡檢[2],通過監控圖像對刀閘的開關狀態進行判斷。相應的圖像分析有基于紅外檢測方法[3],利用尺度不變特征變換(scale invariant feature transform,SIFT)的匹配方法[4]。在復雜背景條件下,這些算法難以正確匹配刀閘,所以如何過濾背景識別刀閘是基于數字圖像處理自動檢測實際應用中的主要問題。
針對這個問題,本文以垂直伸縮式刀閘為例,對所給圖像進行邊緣提取和快速分割。通過改進Freeman鏈碼重新表達絕緣子特征,定位分割后的刀閘區域。利用此類刀閘的共同特點定義刀閘的開關狀態,實現對刀閘狀態的識別。
1 絕緣子的波動點結構
由于絕緣子輪廓具有明顯的密集波動特點,所以采用Freeman鏈碼[5]提取絕緣子波動特征,進而實現復雜背景下的絕緣子檢測及定位。
波動特征提取前,采用圖像二值化方法對圖像進行預處理。本文采用自適應二值化[5],對得到的圖像進行預處理。與全局二值化相比,自適應二值化[6-10]方法是由每個像素位置和這個像素周圍點局部灰度特性來確定此像素二值化閾值的,對不同亮度的圖片適應性強,很好地保留了圖片中物體的邊緣信息。
Freeman鏈碼是像素曲線[9]的一種表示方法。輪廓像素序列中,像素與像素之間的鏈接稱為鏈,每條鏈可以有八個方向(八向鏈碼),即c{i}={0,1,2,3,4,5,6,7}。c{i}表示由像素i指向像素i+1的鏈碼,八向鏈碼如圖 1所示。這樣,一條像素曲線可以轉化為由n條鏈組成的鏈碼,表示為一定順序的連碼表{c(i)}n。鏈碼曲線如圖2所示。
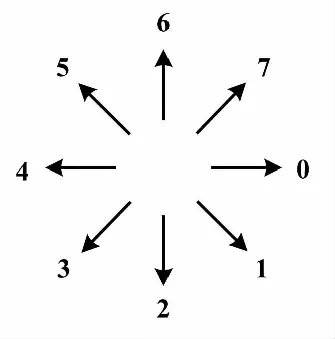
圖1 八向鏈碼 Fig.1 Eight-way chain code
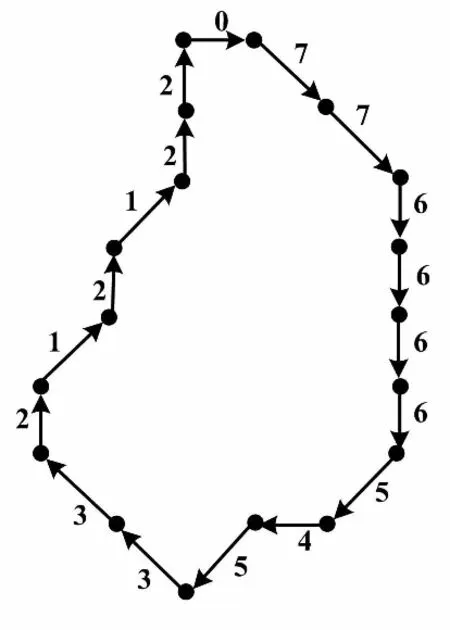
圖2 鏈碼曲線 Fig.2 Chain code curve
相對鏈碼[6],是Freeman鏈碼之間的相互關系。每個像素點都有指向自己的鏈碼(像素i的鏈碼c1和此點指向后一像素點的鏈碼c2)。根據c1、c2的相互關系,鏈碼曲線中第i個像素處的相對鏈碼R(i)的計算公式為:
R(i)=(c2-c1+8)%8
(1)
式中:i為鏈碼曲線中像素序號;c1為第i個像素處的鏈碼;c2為第(i+1)個像素處的鏈碼;%為取模運算。當R(i)≤4時,R(i)=R(i);當R(i)>4時,R(i)=R(i)-8。
根據相對鏈碼可以計算得到絕對鏈碼[6]。設A(i)和A(i-1)分別為鏈碼曲線中第i個像素處和第(i-1)個像素處的絕對鏈碼,則它們之間存在對應關系如下:

(2)
絕對鏈碼可用來計算三點鏈碼和[6]。三點鏈碼和為鏈碼曲線中當前點和其前兩點的絕對鏈碼之和。對于閉合曲線,計算起始兩點時,前面點的值應該繞到尾部取值,此時需要考慮絕對鏈碼的調整值。鏈碼曲線中第i個像素處三點鏈碼和sum(i)的計算公式為:
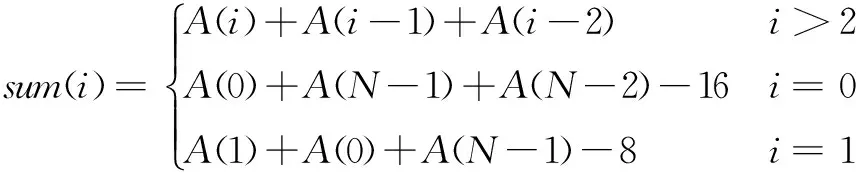
(3)
式中:N為鏈碼曲線的像素總數。
得到鏈碼曲線對應的三點鏈碼和序列后,再將序列中每個像素點的三點鏈碼和sum(i)減去sum(0),即可得到三點鏈碼序列。鏈碼曲線中第i個像素處的三點鏈碼trsum(i)的計算公式為:
trsum(i)=sum(i)-sum(0)
(4)
三點鏈碼主要用來計算三點鏈碼差[7]。三點鏈碼差是指離開此點與進入此點的三點鏈碼之差。鏈碼曲線中,第i個像素處的三點鏈碼差Diff(i)計算如下(間隔三個像素點):
Diff(i)=trsum(i+3)-trsum(i)
(5)
對于閉合的鏈碼曲線,最后一個位置三點鏈碼差的計算應從三點鏈碼序列的起始點處取得:
Diff(N-1)=trsum(3-i)-trsum(N-i)+24
(6)
根據曲線的Freeman鏈碼,可計算出曲線像素點的鏈碼差,并得到與此曲線對應的三點鏈碼差序列。根據對應位置的三點鏈碼差Diff(i),對曲線上的凹凸點進行判斷。判別公式為:
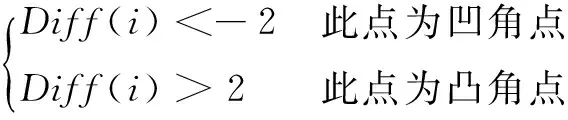
(7)
三點鏈碼差是一個與曲率成正比的量,可用于發現邊界上的角點。Diff(i)為2相當于角度大小為30°,Diff(i)為3相當于角度大小為45°,正負體現凹凸方向。當凹凸角點連續出現時,定義像素點i處存在一個連續波動點結構。
2 絕緣子定位算法
根據連續波動點特征,設計的絕緣子定位算法流程如下。
①檢測二值化后圖像的輪廓信息,并以Freeman鏈碼表示。
②根據圖像的Freeman鏈碼,計算得到圖像輪廓的鏈碼差序列Diff;根據鏈碼差序列,查找出具有連續波動性的角點結構并標記,得到連續波動角點的分布圖。由于復雜背景下絕緣子邊緣出角點出現頻繁,可適當更改比較的閾值,從而限制角度與波動結構長度,以減少復雜背景無序角點的干擾。
③定義查找窗口,設置為絕緣子面積的1~1.5倍,之后通過遍歷連續波動角點分布圖中的連續波動點。根據角點位置對不同的查找窗口投票,查找連續波動性角點最多(票數最高)的窗口位置。
在窗口中,由于連續波動點大多出現在絕緣子周圍,所以絕緣子所在窗口得到的票數最高。
3 刀閘狀態檢測及位置修正
對得到的圖像進行圖像分割,將圖像轉換至Lab空間[10]。利用圖像在Lab色彩空間中的像素數值l(亮度)、a(從紅色到綠色)、b(從黃色到藍色)、坐標(x,y)的五維信息,對圖片進行像素級的聚類,將圖片分割成不同區域。每個區域采用不同的標簽(label)標明。
對于刀閘不同狀態的分割結果,本文使用的分割算法[8]保持了分割圖中原區域的連通性,這將有助于對刀閘開關狀態的定義與定位。
根據背景的最大連通區域的情況,可以定義圖像中刀閘的開關狀態。當刀閘斷開時,絕緣子以上背景最大連通性區域處寬度與圖片寬度相差較小;當刀閘連接時,絕緣子以上背景最大連通性區域處寬度與圖片寬度較大。
使用背景最大連通性區域處寬度與圖片寬度的差值為判別依據,設置適當的閾值可以簡單、有效地區分刀閘開關的兩種狀態。設閾值為圖片寬度的20%。定義D為差值,則刀閘開關狀態判別公式為:
2.企業與職業經理人的信息不對稱。職業經理人的能力是私人信息,外部很難獲得,所以企業在面試職業經理人或者通過獵頭公司獲得他們信息時,就存在信息不對稱的現象,有時甚至出現獵頭公司幫助職業經理人掩飾不符合企業要求的信息內容。這就使得企業在對人員篩選時,面臨著較大的困難,所以只好通過考察職業經理人的學歷、個人財富、職業背景等來減少風險。但是,這些方式不能從根本上解決企業對職業經理人真實信息的需求。
D=W-w
(8)
式中:W為圖片的寬度;w為背景中最大連通性區域的寬度。當D≤0.2W,刀閘處于斷開狀態;當D>0.2W,刀閘處于連接狀態。
由于絕緣子定位算法中窗口定義的大小可能大于刀閘的實際區域,可以在查找窗口(即2中定位窗口)中修正絕緣子的實際位置。查找窗口內部波動點,對其位置所屬區域投票。得票數最多的區域,表明其邊緣占有最多的波動點結構,則此區域為絕緣子區域。
使用波動點結構統計得到絕緣子的定位框后,繼續通過波動點投票修正絕緣子的定位框,位置信息更加精確。
4 試驗結果與分析
為驗證本文提出的利用絕緣子波動點定位絕緣子,根據背景連通性判斷刀閘的開關狀態方法的有效性,將其應用于各種背景復雜的垂直伸縮式刀閘圖像的狀態判斷。本試驗在CPU為Intel Core i5、內存為4 GB的計算機上進行。
圖3顯示了各個刀閘狀態判斷結果。圖3中,下部的基線,是絕緣子修正位置后得到的絕緣子區域上限,目的是確定圖片的判斷區域。上部的黑色區域,則是圖片經過分割后的判斷域中,通過算法自動查找到的最大連通域。根據上述定義的垂直伸縮式刀閘的開關狀態,對最大連通域進行判斷,得到了刀閘的開(連接)、關(斷開)狀態的識別結果。
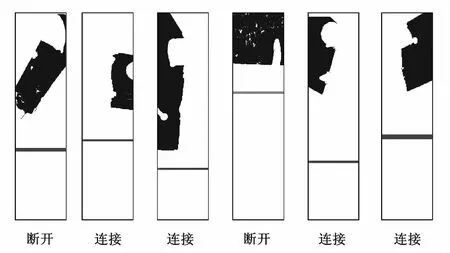
圖3 各個刀閘狀態判斷結果 Fig.3 Judgement of the state of each disconnector
在復雜環境下,以上分析結果驗證了本文提出的算法可以正確定位刀閘中絕緣子的位置以及正確判斷刀閘的開關狀態。
5 結束語
本文提出了一種針對垂直伸縮式刀閘開關狀態的識別方法。該方法實現了復雜背景下絕緣子的自動定位,可用于其他含絕緣子物體的輔助定位。根據圖像分割后刀閘不同狀態下背景連通性的不同,該算法能夠區分刀閘的開關狀態。
參考文獻:
[1] 王德才,曾瑾文.變電站6 kV刀閘狀態監控研究分析[J].自動化應用,2011(9):40.
[2] 周立輝,張永生,孫勇,等.智能變電站巡檢機器人研制及應用[J].電力系統自動化,2011,35(19):85-88.
[3] 張國燦,蘇東青,葉玉云.紅外成像技術在電力設備狀態檢測中的應用[J].電工技術,2012(12):48-49.
[4] 侯一民,邸建銘.改進的尺度不變特征轉換精確圖像匹配在電力設備目標定位中的應用[J].中國電機工程學報,2012,32(19):134-139.
[5] WANG H Y,PAN D L,XIA D S.A fast algorithm for two-dimensional adaptive threshold algorithm[J].Journal of Image & Graphics,2005,33(9):968-971.
[6] 余博,郭雷,趙天云,等.Freeman鏈碼描述的曲線匹配方法[J].計算機工程與應用,2012,48(4):5-8.
[7] 譚建豪,章兢.基于鏈碼差的邊界凸凹性判別[J].科學技術與工程,2007,7(5):769-772.
[8] FELZENSZWALB P F,HUTTENLOCHER D P.Efficient graph-based image segmentation[J].International Journal of Computer Vision,2004,59(2):167-181.
[9] DONALD H,PAULIN M,WARREN R.計算機圖形學[M].蔡士杰,楊若瑜,譯.北京: 電子工業出版社,2014.
[10]龐曉敏,閔子建,闞江明.基于HSI和LAB顏色空間的彩色圖像分割[J].廣西大學學報(自然科學版),2011,36(6):976-980.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
