排隊檢測在邢衡高速(衡水段)的應用
2018-04-24 06:12:28
中國公路 2018年7期
石家莊泛安科技開發有限公司 狄亞璞
河北省邢衡高速公路分為邢臺段和衡水段,其中衡水段環繞衡水市連接大廣高速公路,全長72.2公里,雙向四車道設計,促成了衡水繞城高速公路的形成。本文結合高速公路全程信息化綜合管理平臺系統在邢衡高速公路(衡水段)的實施,介紹排隊檢測功能在該項目中的應用。
排隊檢測簡介
現有的交通控制手段大多利用微波車檢器、卡口、紅外激光雷達或高頻雷達等方式來實現對車輛的檢測功能,而邢衡高速公路實現了基于視頻分析的車輛排隊檢測功能。與既有方法相比,基于視頻分析的智能交通監控系統具有以下優點:監控范圍大、投資少、費用低、攝像頭便于安裝調試、獲得交通信息多。對于高速公路車輛排隊長度的檢測,可通過車輛排隊長度和頻率信息,調整高速公路收費入口數量以及對路段事故做出及時反應,以減少擁堵。排隊檢測主要分為兩步,即車輛有無排隊情況的判斷和隊列長度計算。
日間場景下的車輛排隊檢測
在日間光線充足的情況下,通過攝像頭,路段上車輛的外部輪廓信息和運動信息比較容易獲得。對于攝像頭獲取的圖像,有多種方法可進行車輛的排隊檢測,在這里我們采用移動檢測窗法對車輛進行排隊檢測,其中主要包括形態學邊緣車輛存在檢測以及幀間差分法運動檢測兩部分。
一般來說常用對車輛運動檢測的辦法有以下三種:(1)利用圖像序列中的像素強度數據的時域變化和相關性來確定各自像素位置的“運動”的光流法,即研究圖像灰度在時間上的變化與景象中物體結構及其運動的關系。光流計算方法大致可分為三類:基于匹配的方法、頻域的方法和梯度的方法。光流法通常存在計算復雜度高以及計算精度欠缺的問題。(2)基于背景的差分法是采用圖像序列中的當前幀和背景參考模型比較來檢測運動物體的一種方法,但是由于場景的復雜性、不可預知性及各種環境干擾和噪聲的存在,如光照的突然變化、實際背景圖像中有些物體的波動、攝像機的抖動、運動物體進出場景對原場景的影響等,使得背景的建模和模擬變得比較困難。(3)幀間差分法是一種通過對視頻圖像序列中相鄰兩幀作差分運算來獲得運動目標輪廓的方法,它可以很好地適用于存在多個運動目標和攝像機移動的情況。幀間差分法算法實現簡單,程序設計復雜度低,對光線等場景變化不太敏感,能夠適應各種動態環境,穩定性較好。
車輛邊緣檢測是判斷車輛存在與否的重要依據,車輛的邊緣檢測方法有很多,有基于統計學方法的也有基于梯度或其他指標的,車輛邊緣檢測現在主要存在的問題是對圖像中的噪聲的處理以及對一些圖像中細小的邊緣的檢測。
車輛排隊檢測通常采用移動檢測窗的算法進行實現。原理是利用一個在攝像機圖像里長度為一輛車長度的動態檢測窗,從排隊車輛的隊頭向隊尾逐步移動,又由于近大遠小的透視原理,所以動態檢測窗的大小會根據車輛距離攝像機的距離變化,距離攝像機越遠的地方檢測窗的大小越小。
夜晚場景車輛排隊檢測
在夜晚場景下,環境光線變得微弱,考慮到夜晚行車的車輛都會打開車燈,因此選擇車燈作為特征量對車輛進行檢測。對于車燈作為特征量的夜晚車輛檢測的準確性,過濾掉干擾光源是十分重要的。干擾光源包括路燈、路面反光及路標反光等。
夜晚場景下的車輛排隊檢測與日間場景的檢測方法類似,夜晚場景下的排隊檢測采用的也是移動檢測窗的排隊檢測方法。移動檢測窗法的原理是從隊首開始,在當前的檢測窗內,若連續幾幀都能通過車燈的檢測判斷檢測窗內有車存在,則確定當前檢測窗內有車輛在排隊,移動檢測窗向隊尾方向移動一個車輛長度位置,排隊隊列變長;當出現連續幾幀檢測窗內都不出現車輛的情況,檢測窗停止移動,排隊檢測結束。
排隊長度計算
如果想要通過攝像機計算車輛隊列的實際長度,就需要建立三維空間坐標和二維圖像坐標之間的關系,其中的關鍵是建立攝像機的透視模型,通過實際測量,標定攝像機的內外參數,從而確定攝像機從三維空間坐標到圖像中二維坐標的關系。
攝像機的標定方法有很多種,利用兩條平行的車道線和車道的寬度對攝像機進行標定,這種方法不需要已知攝像機高度傾斜角等信息,且可以僅通過兩條平行的車道線與實際測量的車道寬度的信息,就可以準確標定出所需攝像機的參數。這個標定方法簡單實用,操作方便,且具有很高的準確性。
在對攝像機進行標定后,就建立了三維空間坐標到圖像中二維坐標的關系,通過相應的計算公式,就可以通過二維圖像里面排隊車輛的長度推算出現實世界中的車輛隊列長度。
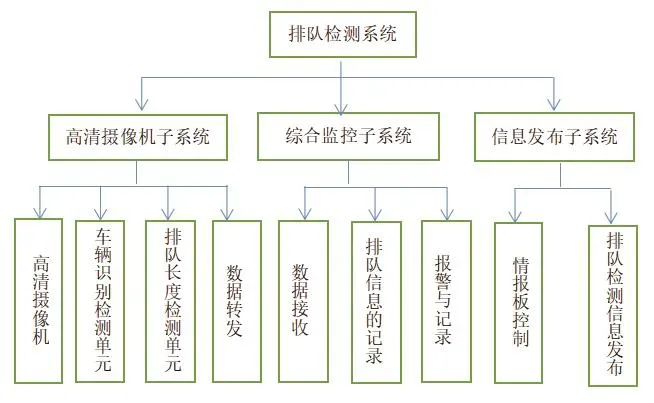
圖1 系統構成圖
系統實現和應用
系統實現排隊檢測的流程主要如下:通過兩條平行的車道線和車道的寬度標定路段上的攝像機,建立三維空間坐標和二維圖像坐標之間的關系;判斷外部光照強度,若光照強度達到日間標準,則啟用日間車輛排隊檢測算法;否則,采用夜間車輛排隊檢測算法;通過移動檢測窗對高清攝像機圖像進行檢測,如出現排隊情況,則計算隊列長度;將排隊信息上傳至綜合監控平臺,監控平臺通過可變情報板對排隊情況進行發布或者通過語音提醒的方式進行排隊事件提醒;將每次排隊的信息,如地點、時間、排隊長度等記錄進排隊檢測信息查詢表,并進行數據分析。
系統實際應用
通過排隊檢測技術在邢衡高速衡水段項目的實施,經過測試能夠達到預期效果。以下是系統應用能達到的實際效果:檢測車輛有無排隊的情況;計算排隊車輛隊列的長度;接收排隊檢測的各類報警;能夠進行語音事件提醒,并能夠對事件進行確認處置,包括確認誤報、解除事件等;進行排隊事件的記錄與查看。
系統可靠性需求
為了使系統對于排隊檢測中有無車輛排隊情況的判斷、車輛隊列長度的計算,以及對車輛排隊事件的記錄與查詢等功能更加準確與可靠,需要保證做到以下幾點:攝像機的精確標定。對于車輛排隊長度的計算十分重要,如果攝像機標定不準,從二維圖像坐標到三維世界坐標的轉換就會出現一定的誤差,導致最后的隊列長度計算出現極大的偏差;系統時間同步。由于系統需要對排隊事件進行記錄,方便統計、分析和查詢,因此整個系統的時間同步性十分重要,對系統針對排隊情況的統計分析的準確性有很大影響;系統通訊。攝像頭視頻圖像的數據傳輸必須依靠網絡,所以網絡的暢通穩定可靠是保證系統正常運轉必不可少的條件。
結語
邢衡高速公路全程信息化綜合管理平臺引入了排隊檢測系統,通過排隊檢測功能,平臺系統可以通過攝像頭的視頻圖像,檢測當前有無車輛排隊并且可以通過標定好的攝像頭計算當前車輛排隊的長度。系統還可以做到對排隊進行語音提醒,同時系統會記錄排隊事件的信息,并對排隊的信息進行數據分析,便于邢衡高速公路的管理單位提升高速公路管理水平,為邢衡高速公路的全程信息化綜合管理打下了堅實的基礎。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發展導向(2021年20期)2021-11-20 05:43:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
海峽科技與產業(2016年3期)2016-05-17 04:32:12
小說月刊(2014年4期)2014-04-23 08:52:20
