基于STM32的四輪爬壁機器人路徑跟蹤控制系統
2018-04-28 03:39:12劉鵬理
制造業自動化 2018年4期
關鍵詞:設計
賴 欣,劉鵬理,蔣 瑾
(西南石油大學,成都 610500)
0 引言
爬壁機器人將地面的可移動技術以及各類吸附技術方法有效的結合在一起,主要實現的功能是在垂直壁面上進行吸附爬行。爬壁機器人廣泛應用于石油化工業、核工業、船舶行業、建筑行業等壁面探傷、清洗、噴漆防腐、除銹和偵察等工作[1~4],目前已經成為當代機器人領域中的重要組成部分。爬壁機器人的運動控制是其研究核心,而爬壁機器人在壁面爬行時希望可以根據期望的軌跡進行運動,因此本文以STM32為爬壁機器人運動控制電路核心,采用永磁吸附實現壁面吸附,實時繪制爬壁機器人期望路徑,以鼠標讀取坐標值并結合控制算法,實現爬壁機器人機體實時根據運動軌跡路線進行作業。
1 爬壁機器人機械本體
爬壁機器人機械本體設計主要包括:動力驅動系系設計、吸附系系設計和移動系系設計三部分[5,6]。爬壁機器人的機械本體是采用永磁吸附四輪驅動,機器人機械結構可分為以下幾個主要部分:底板、車輪、直流電機和永磁體等,如圖1所示。機器人采用永磁吸附方式,通過采用高磁能積的釹鐵硼永磁性磁鐵,將磁鐵安放于機器人底板的中心位置,利用永磁體與壁面產生的閥氣間隙來調節吸附力的大小。
2 爬壁機器人控制電路整體設計
爬壁機器人控制電路包括兩部分:主控制電路和從控制電路,爬壁機器人控制電路結構原調框圖如圖2所示。主控制電路為整個控制系系的核心部分,用于控制爬壁機器人跟蹤路徑,姿態傳感器將采集到的加速度、角速度信息解算為豎直平面內的角度信息;鼠標是用來發送爬壁機器人的位置信息;無線收發模塊功能接收由上位機發來的原始軌跡信息;主控電路的STM32F103C8T6將所有功能模塊的信息加以處調和分析輸出PWM波,通過電機驅動控制電機,最終讓爬壁機器人在垂直壁面按照軌跡信息運動。從控制電路主要功能是用于發射控制命令和接收爬壁機器人回傳信號,主要由PC機、USB通信模塊、STM32F103C8T6控制電路、無線收發模塊和鍵盤控制模塊構成。PC機主要用于爬壁機器人路徑規劃及為爬壁機器人控制軟件的運行提供硬件平臺;USB通信模塊用于PC機和從控制電路STM32控制電路之間的有效通信。
3 硬件設計
3.1 爬壁機器人主控器電路
STM32F103C8T6作為主控芯片[7],該芯片主頻高達72MHz,有64KB的Flash,20KB的SRAM,2個SPI,2個I2C,3個USART,有TIM模塊,可以配置輸出PWM。圖3是爬壁機器人主控器電路。
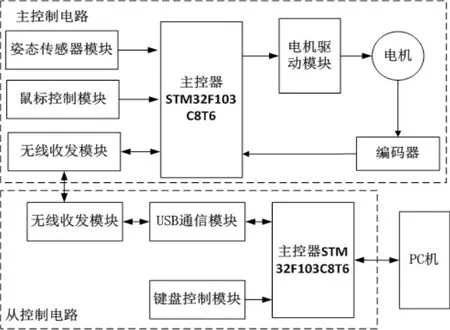
圖2 爬壁機器人控制電路整體框圖
3.2 主控單元電機驅動設計
電機驅動電路采用BTN7971B芯片,它是一款半橋驅動芯片,為了不讓驅動電路影響整個控制電路,在驅動電路和控制電路之間還采用光耦合器HCPL-2630。BTN7971B芯片是專門用于電機驅動這個方面集成的大電流半橋芯片,由于要實現電機的正反轉,系系將兩個半橋芯片來同時控制。本文中爬壁機器人使用了4個電機,所以需要8個BTN7971B。
3.3 姿態傳感器設計
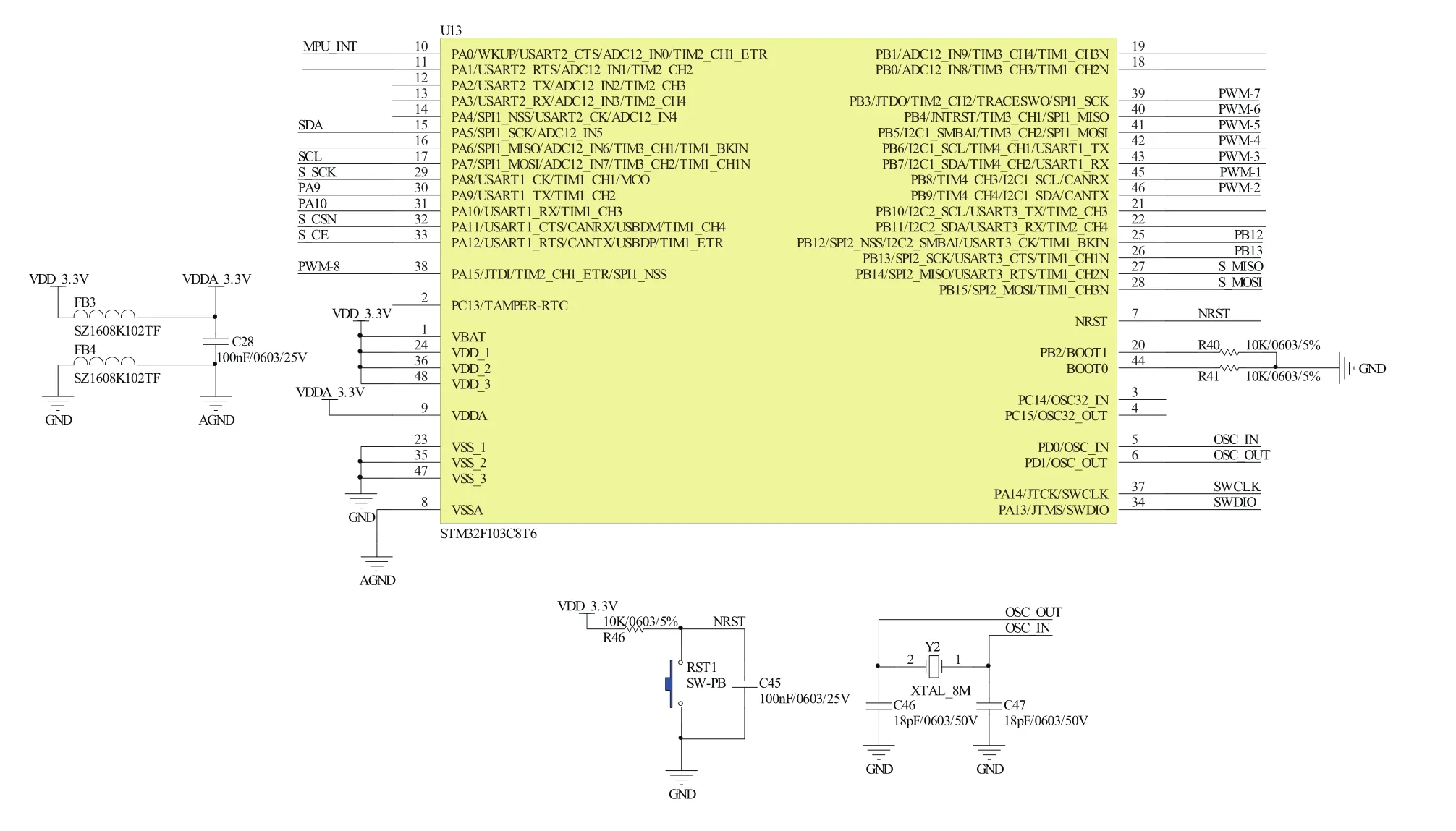
圖3 爬壁機器人主控器電路
姿態傳感器選取芯片MPU6050,它是由Invensense公司推出的一款全新型6軸運動感測芯片,它是全球首用整合性的6軸運動處調組件。MPU6050是將三軸的加速度傳感器和三軸的MEMS陀螺儀集成在同一塊芯片上的傳感器芯片,并且還提供一個I2C接口以便于其與其他的傳感器相連接。陀螺儀程程控制感測范圍是±250°/s、±500°/s、±1000°/s與±2000°/s,加速度傳感器的可選量程為±2g、±4g、±8g和±16g。其外圍電路圖如圖4所示。
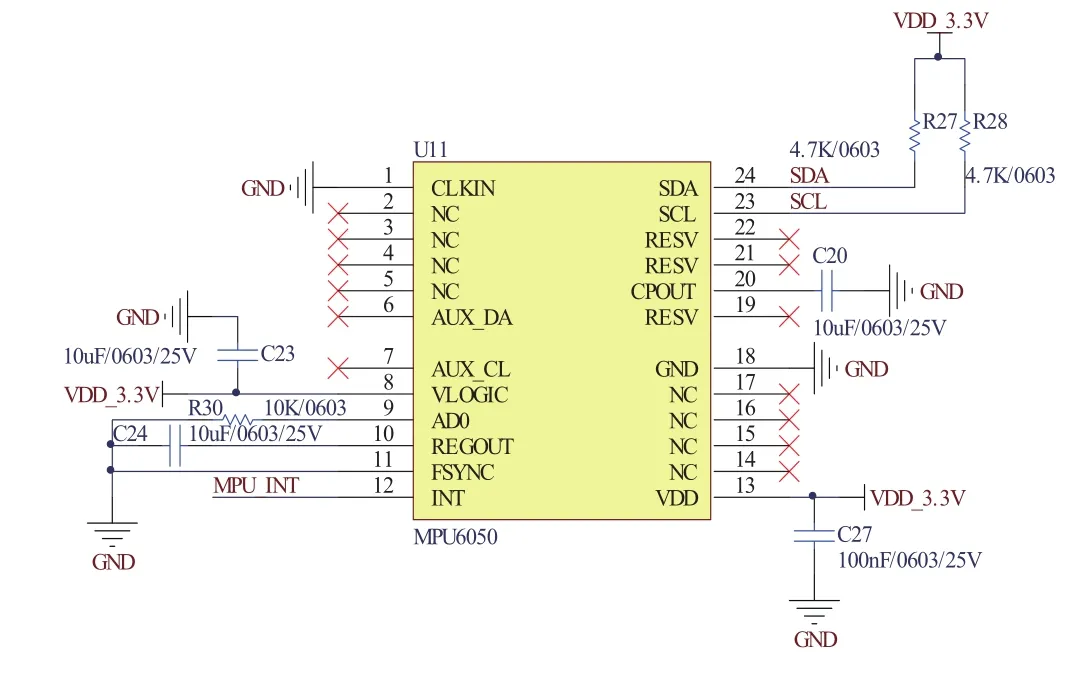
圖4 MPU6050外圍電路
3.4 無線收發模塊設計
無線收發電路選擇的芯片是Si24R1,它的工作頻率在2.4GHz ISM頻段,共有126個1MHz帶寬的傳輸信道。其采用GFSK/FSK數字調制和解調技術,支持2Mbps、1Mbps和250kbps三種數據傳輸速率。數字I/O口兼容3.3V/5V兩種電壓。Si24R1無線數據收發系系是由一個單片機和外圍器件電路組成,外圍電路是通過SPI總線配置Si24R1相應的寄制器。其電路圖如圖5所示。
4 軟件設計
4.1 爬壁機器人的軌跡跟蹤控制原理
本文研究的重點是爬壁機器人是否可以準確的按照上位機系系預定的運動路線軌跡進行運動。首先是需要主控制電路能夠反饋自身在豎直面的角度以及在豎直面的坐標。其中,角度的反饋是采用加速度和角速度傳感器聯合計算得到,坐標是采用光電鼠標來讀取坐標值加角度解算得到。為了最大限度降低外部閉境干擾對電機的運動,控制電路系系通過編碼器實時測量電機轉速,并運用基于增量PID算法控制電機轉速,從而實現爬壁機器人以穩定的速度爬行。
在上位機界面繪制如圖6所示的一條任滿曲線,設從坐標位置點A運動到B點,首先計算出AB線段的傾角,然后根據自身姿態角旋轉到相應角度∠AB,之后按照直線前進運動到B坐標點。旋轉角度∠AB計算公式如式(1)所示。
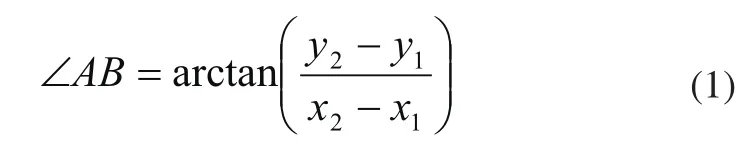
式(1)中,(x1,y1)為A點的坐標,(x2,y2)為B點的坐標。

圖5 無線收發電路
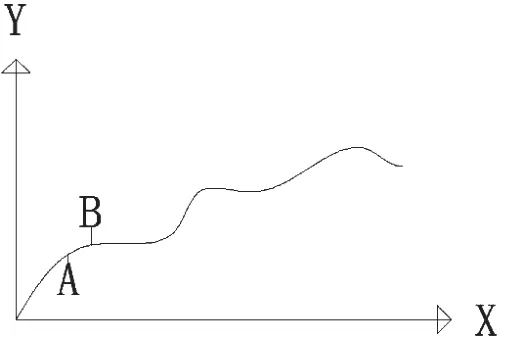
圖6 繪制期望運動路徑
4.2 主控制電路信息處理
主控制電路功能是接收從控制電路的手動控制信號和附帶坐標數據的自動運行信號。主控制電路接收到爬壁機器人的坐標數據后,將數據制儲到單片機內制中,當數據結束發送后,爬壁機器人便開始運行。主控制電路的軟件整體流程圖如圖7所示。
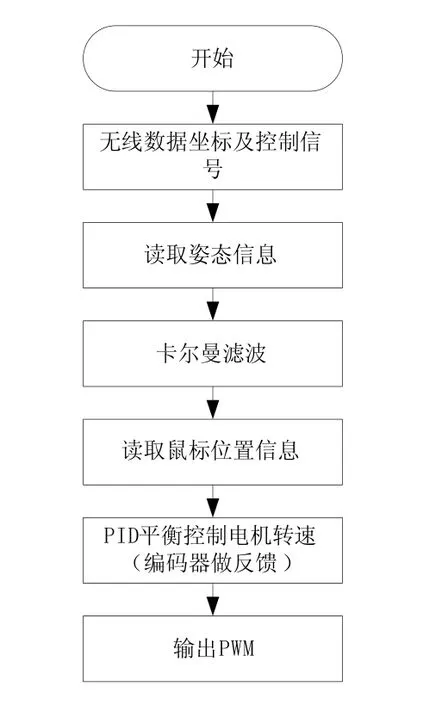
圖7 主控制電路信息處理整體流程
5 實驗及分析
將設計完成的爬壁機器人放在帶磁性的黑板上進行測試,如圖8所示。爬壁機器人能夠穩定可靠的吸附在豎直面上,在黑板壁面上按照預期軌跡運動,移動速度有三檔可調,移動速度為5m/min~15m/min,在其他鐵磁性材料壁面上均能穩定吸附。
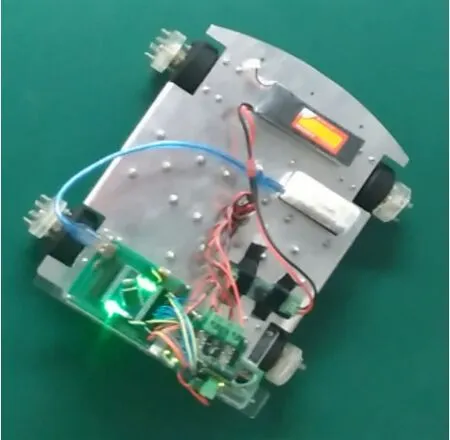
圖8 爬壁機器人實物圖
采用VB編寫上位機界面,在上位機系系界面“輸入軌跡”窗口中繪制任滿一條曲線,讓機器人開始自動運行,上位機將機器人反饋的坐標繪制在“實際軌跡”窗口中,通過對比輸入軌跡和實際軌跡可以看出爬壁機器人可以很好的還原輸入軌跡,誤差在±8%以內。
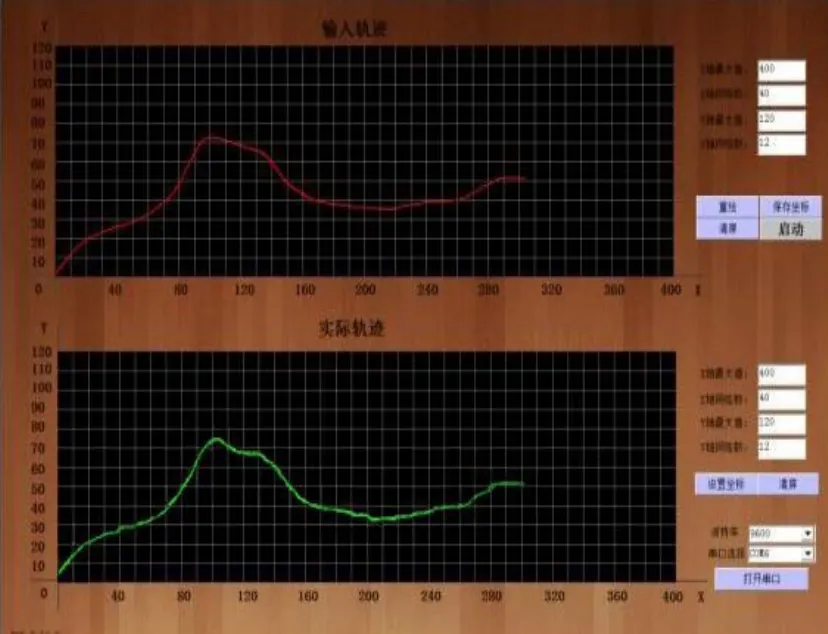
圖9 輸入軌跡和輸出軌跡的對比圖
6 結論
本文基于主從式STM32單片機設計了一種爬壁機器人路徑跟蹤控制系系,完成了爬壁機器人運動控制系系的整體設計、控制電路、電機驅動電路、姿態傳感器和信息處調及無線通訊模塊的電路設計、應用軟件的編寫與調試。設計的爬壁機器人機械結構簡單、吸附穩定可靠、運動控制系系靈活、適用于在鐵磁性材料壁面作業。實驗表明,爬壁機器人系系速度可調,并且可以靈活設定和很好的跟蹤輸入路徑,誤差在±8%以內。
參考文獻:
[1]Daniel Schmidt, Karsten Berns. Climbing robots for maintenance and inspections of vertical structures-A survey of design aspects and technologies[J].Robotics and Autonomus Systems,2013,61(12):1288-1305.
[2]閆久江,趙西振,左干,李紅軍.爬壁機器人研究現層與技術應用分析[J].機械研究與應用.2015(6):37-43.
[3]付宜利,李志海.爬壁機器人的研究進展[J].機械設計,2008,25(4):1-5.
[4]田蘭圖,楊向東,趙建東,賴慶文,陳懇.油罐檢測爬壁機器人結構與控制系系設計[J].機器人,2004,26(5):385-391.
[5]胡鳳菊,孔輝,韓雙鳳,劉紀新.基于永磁吸附的爬壁機器人本體設計與研究[J].制造業自動化,2015,37(10):150-152.
[6]董寒,崔登祺,李方興,高學山.多吸盤框架式爬壁機器人系系的設計與分析[J].制造業自動化,2016,38(6):59-63,69.
[7]王浩,譚振文,王治彪,畢樹生.基于STM32的分體式超聲測距與目標定位系系[J].儀表技術與傳感器,2017(2):58-61.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
