提升機輸送帶糾偏方法思考
2018-04-30 04:17:04徐劍雄曹其紅
科學與技術 2018年9期
徐劍雄 曹其紅
摘要:就提升機輸送帶在輸送過程中跑偏的機理進行研究,設計出輸送帶運動糾偏的機械裝置和控制系統,其控制算法采用模糊控制。
關鍵詞:模糊控制;提升機;輸送帶;糾偏
1 引言
帶式提升機在農村農業生產中的應用十分廣泛,其主要功能是被用于物料的運輸,其功能主要是依靠輸送帶的料斗運動來完成。因此要提高帶式提升機工作的穩定性和效率,就必須保證輸送帶的平穩性。實際上由于輸送帶具備粘彈性的特征,再加之料斗裝料屬于脈動過程,導致帶式提升機在實際工作時,輸送帶往往出現偏離、抖動等不利于保持平穩性的情況。
2 結構分析
帶式提升機在不同生產中的應用所采取的安裝方式存在差異,復合肥生產中通常采用垂直安裝方式,通過電動機來提供動力,實現帶式提升機的輸送功能。帶式提升機上下輥軸之間的距離為8000mm,發動機工作后為輸送帶提供動能,然后利用料斗來完成對物料的提升工作。料斗參數為:長100mm,寬200mm,深200mm,在帶上間距為200mm,帶速1.65m/s,設計輸送能力9t/h。
帶式提升機在復合肥生產中應用時,由于復合肥物料本身具有吸水性的特點,導致粘結、料斗裝載不均勻等不良情況發生,進而阻礙傳送帶的運輸工作,使輸送帶在工作時出現跑偏問題。
3 力學研究以及分析
輸送帶在工作時具有一定的動力,容易產生較為明顯的粘彈性特征,對應的應力應變具備蠕變、熱粘、非線性等一系列明顯特點。本文所研究的帶式提升機,在工作中受到結構、機械加工及負荷變化等一系列因素的影響,導致輸送帶產生抖動的情況,影響帶式提升機的正常工作。理想狀態下,料斗所裝運的物料是均勻的,輸送帶產生均勻拉應力S,此時屬于正常工作情況,不會出現輸送帶跑偏的問題。但是,由于受到物料不均勻以及其他一系列因素的影響,導致拉應力不會像正常情況下均勻分布,就會產生力矩M,讓輸送帶額外承受一個沿帶寬方向的力,若該力的取值較大,甚至大于帶寬方向的摩擦力時,輸送帶將無法保持正常的工作狀態,而是會出現一個偏離,導致輸送帶跑偏的不良情況出現。
4 控制原理以及結構設計
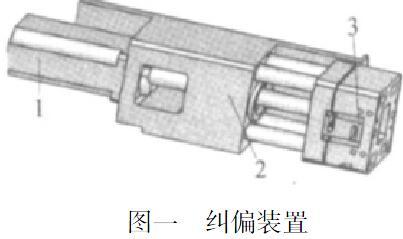
為有效解決輸送帶的跑偏問題,基于上述分析可以發現,只要給輸送帶額外增加一個與M反向的力矩就可以抵消M,讓輸送帶保持正常工作,可通過調整運動輥的軸向距離的偏移量來實現。具體操作是步進電機通過電能產生運動,能夠促使絲桿螺母產生相應的副運動,就可以帶動輥軸產生相應的運動,達到改變偏移量的重要目的。復合肥提升機的帶輪張緊糾偏機構位于提升機的下部,上部為驅動主動輪,通過對下部從動輥軸位置的調整,實現輸送帶的張弛以及運行過程中的糾偏。從動輥張緊糾偏機構采用驅動絲桿螺母副通過力傳感器實現其從動輥支撐的位置調整。
如圖1所示。驅動部件采用步進電機,傳動部件為滑動絲桿螺母副,利用滑動絲桿螺母副自鎖功能保證調整位置的可靠性。從動輥支撐與驅動部件間安裝的力傳感器用于檢測活動帶的張力,通過檢測2個從動輥支撐上活動帶張力的平衡狀況,實現對輸送帶偏擺狀態的監測。張緊糾偏機構在運行過程中由控制系統實現從動輥狀態的自動調整,亦可采用點動方式實現手動控制。
4.1 參數
元器件的基本參數如下:糾偏機構驅動選用步進電機86BYG250FB,其保持轉矩為6Nm;絲桿的外徑40mm、導程為6mm;以運動速度24mm/s計,2個糾偏裝置采用LC0501測力傳感器分別安裝在從動輥的兩側,可承受負載為1000N。
4.2 控制算法
基于上文分析,研究顯示如果要達到解決輸送帶跑偏問題的目的,調整主從動輥的軸間距離能夠有效地保證輸送帶按正常軌道運行。本文假設螺桿所增加的軸向支撐力為DN,電機輸入脈沖數量為n,基于應力應變的基本分析及原理能夠得到如下公式:DN=Kn,其中K為系數,與螺桿的螺距、步進電機的系數、彈性模量以及輸送帶受力面積有關,而輸送帶為粘彈性體,其應力應變滿足。利用步進電機來調整軸向支撐力DN,能夠使實際的摩擦力發生變化,有效地解決輸送帶跑偏的問題。整個過程的分析需要構建復雜精細的數學模型,才能將眾多影響因素一并考慮在內,在實際操作時具有較大的困難,因而可利用模糊控制來進行控制算法設計。
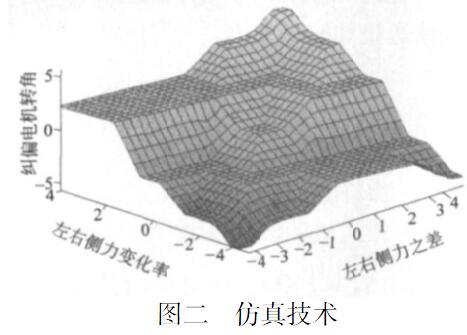
4.3 為了驗證模糊控制規則的正確性
本文基于MATLAB工具來進行仿真模擬,分析模糊控制規則是否有效,得到仿真模擬圖如圖2所示。由圖可知,模糊規則具有較高的合理性和可行性。
測力傳感器LC0501具有良好的線性,基本電壓輸出為0-5V,但其承載的荷載是有限的,通常情況下為1000N,若加大荷載將導致測力傳感器無法正常工作。由于測力傳感器測定的信號較小,必須采用LM324這樣的放大器來對測定信號進行有效的放大處理。此外在經過放大處理后的信號均是模擬信號,必要步驟是通過ADC0809(A/D轉換器)來實現將這些信號轉換為數字信號的過程。在完成模擬信號與數字信號之間的轉換后,采用單片機AT89S51進行處理,在完成對數字信號的處理工作后,就可基于模糊控制算法來得到脈沖控制信號,進而實現對步進電機的控制,達到解決輸送帶偏離問題的目的。
5 提高提升機輸送使用壽命的策略
5.1 對提升機接料板進行合理設改造
提升機接料板初始狀態為傳統的“一”字形,通過將該形態改為“槽”字形來實現對形態的改造,并在材質方面也做出了相應改變,用10mm耐磨鋼板替換普通鋼板。為避免出現磨通返料的不良情況出現,在具體改造時可以在背面增加40*50*20mm的背包,將能有效解決該問題。若出現接料板磨通返料情況,通過增加該背包,能夠避免再次磨通返料的情況出現,在背包形成料層。此外還對安裝方式進了改進,傳統方式是由單一螺絲來進行相互連接,本次改進對側面和工作面進行了區分,側面仍采用螺絲連接,但是工作面則基于焊接齊用來進行連接。由此有利于增加接料板的牢固性,提高安裝位置的傾斜程度,由最初的30度上升到45度,并且位移向后了50mm。通過上述改進,有利于降低物料與接料板二者之間的角度,即降低了二者之間的摩擦力,同時加大了接料板間距,能夠很好地避免出現接料板卡的情況出現。
5.2 更換螺絲墊片型號
連接螺絲帶抓墊片由原來的1mm的沖壓鐵皮帶抓墊片更換成了鑄鐵型帶抓墊片,通過上述操作能夠有效提高帶抓墊片強度,由此為輸送帶提供一定的保護功能,使用沖壓鐵皮或鑄鐵型帶抓墊片來替換。
6 結語
通過對本文的帶式提升機進行現實應用,發現并未出現輸送帶跑偏的不良情況,說明本文所提出的方法完全是有效、合理的,具有較強的現實意義。但是由于其他系列因素的外在影響,輸送帶在實際運行中仍會出現抖動和左右運動,但是這種跑偏是可以恢復的,不會對帶式提升機的正常工作產生較大影響,后續研究可深入分析如何避免這種情況。
參考文獻
[1]宋偉剛.通用帶式輸送機設計.北京:機械工業出版社,2006
[2]周廣林,陳健,羅鳳利等.輸送帶的粘彈力學特性.煤礦機械,2001(12)
作者簡介:徐劍雄(1989年12月),男,漢族,籍貫:江蘇省揚州市,大學本科,助理工程師,研究方向:機械工程-輸送設備
曹其紅(1986年09月),女,漢族,籍貫:江蘇省泰興市,大學專科,助理工程師,研究方向:機械工程-輸送設備
(作者單位:江蘇豐尚智能科技有限公司)
