球頭接觸副對柱式負荷傳感器方位誤差的影響研究*
2018-05-02 03:42:03陳俊翔楊曉翔姚進輝
機電工程 2018年4期
陳俊翔,梁 偉,,楊曉翔,3*,姚進輝
(1.福州大學 機械工程及自動化學院,福建 福州 350116;2.福建省計量科學研究院,福建 福州350003;3.泉州師范學院,福建 泉州 362000)
0 引 言
應變式負荷傳感器由球頭接觸副、傳感器主體、底座組成,而傳感器主體又包含了彈性體、應變片及惠斯通電橋。柱式負荷傳感器具有:結構簡單緊湊、便于安裝;彈性元件剛度大、固有頻率高、動態響應快;良好的抗沖擊和抗側載能力等優點[1]。
柱式負荷傳感器上的負載必須盡可能作用在彈性體軸心方向上。附加彎矩和側向力等寄生分量都是測量結果的干擾因素,當其超過允許極限時,將直接損壞傳感器。對于非固定安裝使用的柱式負荷傳感器,使用時安裝位置存在隨意性,寄生分量將造成傳感器在不同方位上的示值發生改變,從而產生方位誤差,影響被測對象的測量結果[2]。因此,控制好傳感器寄生分量對于改善傳感器方位誤差、提高負荷測量結果的準確度具有重要意義。
方位誤差作為負荷傳感器等級評判的一個重要指標,目前對此展開的研究十分廣泛。Bray A等人[3]提出傳感器結構的不對稱性和力標準機材料的不均勻性是引起方位誤差的根本原因。Peters M等人[4-5]通過大量的比對試驗發現,附加彎矩及力的非軸向分量是產生方位誤差的直接原因。Nile S[6-7]發現補償平臺的彎曲剛度不足會導致方位誤差的產生。因此,研究人員又提出了許多減小方位誤差的措施。Andrae J等人[8]提出改善傳感器結構的對稱性有利于減小方位誤差;Kang D I等人[9]提出通過彎矩補償可有效抑制由平行度引起的方位誤差。
球頭接觸副作為傳感器的重要組成部分,主要起到將被測力值傳導至彈性體的作用。依賴其球面結構,可以通過球面滾動有效改善因被測載荷作用方向傾斜對測量結果造成的影響,對傳感器的整體性能表現有重要的作用。
本文以300 kN柱式負荷傳感器為研究對象,在其常用球面尺寸范圍內選定球頭接觸副的接觸類型、接觸副球面尺寸,并對被測傳感器進行理論計算、有限元仿真分析,結合負荷特性試驗探究球頭接觸副對柱式負荷傳感器方位誤差的影響,總結出球頭接觸副球面尺寸變化對傳感器方位誤差的影響規律。
1 傳感器理論計算
1.1 被測傳感器工作原理
本文選用某廠商LC-3 300kN 0.3級柱式負荷傳感器為研究對象,其應變片貼片方式如圖1(a)所示,其中應變片1、4測量縱向應變,應變片2、3測量橫向應變;橋式電路如圖1(b)所示,R1、R2、R3、R4表示應變片阻值,電橋輸出電壓為[10]:
(1)
式中:Ui,Uo—電橋輸入、輸出電壓,V;K—應變片靈敏系數;ε1,ε2,ε3,ε4—應變片應變。
在傳感器加工過程中,應變片手工粘貼位置必然存在偏差,難以保證應變片1、4或應變片2、3處在彈性體橫截面的同一直徑上,應變片粘貼方位偏移如圖1(c)所示,定義應變片4偏移角度為α,應變片3偏移角度為β。

圖1 被測傳感器主要結構示意圖
傾載作用下傳感器受力示意圖如圖2所示。

圖2 傾載作用下傳感器受力示意圖
如圖2(a)所示,由于傳感器自身結構缺陷、測量基準面傾斜亦或是被測載荷存在一定的傾角等原因,將導致被測載荷與傳感器軸線之間存在不應有的夾角,使被測載荷集中作用在彈性體上某一點。此時彈性體受力情況如圖2(b)所示,將彈性體近似為實心圓柱體,被測傾載F簡化為與彈性體軸線重合的豎直載荷Fn、橫向載荷Ft及附加彎矩Mz。
本文主要研究球頭接觸副對傳感器所受附加彎矩Mz的影響,其對傳感器所受橫向載荷Ft無改善作用,且當傳感器受小角度傾載作用時,橫向載荷Ft數值較小,故僅考慮在附加彎矩Mz及豎直載荷Fn的作用下,傳感器各應變片產生的應變:
(2)
(3)
(4)
(5)
Fn=Fcosθ
(6)
S=πr2
(7)
Mz=Fecosθ
(8)
(9)
式中:F—被測傾載,kN;Fn—與彈性體軸線重合的豎直載荷,kN;S—彈性體橫截面積,mm2;Mz—傳感器所受附加彎矩,N·m;x1,x2,x3,x4—應變片粘貼處x軸坐標,mm;Iz—彈性體橫截面對z軸的慣性矩,mm4;E—彈性體材料楊氏模量,GPa;μ—彈性體材料泊松比;r—彈性體橫截面半徑,mm;θ—被測載荷與傳感器軸線夾角,°;e—被測載荷作用點偏心距,mm。
1.2 傳感器方位誤差計算
本研究參照《GB 13634-2008-T單軸試驗機檢驗用標準測力儀的校準》[11],對傳感器方位誤差進行計算:
(10)
(11)

將各方位下的x1、x2、x3、x4代入式(2~5),并聯立式(1~11)可得:



(12)
由式(12)可知:傳感器方位誤差b受被測載荷作用點偏心距e、彈性體材料泊松比μ、彈性體橫截面半徑r、應變片偏移角度α、β等因素的影響。當傳感器出廠后,μ、r、α、β成為定值。此時,結合式(8,12)可知:在同一被測傾載F作用下,傳感器方位誤差隨著被測載荷作用點偏心距e的減小而減小,即隨著傳感器所受附加彎矩Mz的減小而減小。
1.3 球頭接觸副工作原理
球頭接觸副主要分為球面-球面接觸副及球面-平面接觸副兩種類型。球面-球面接觸副多見于輪輻式稱重傳感器;柱式負荷傳感器常將彈性體頂端加工為球狀結構,配合平面壓頭作為球面-平面接觸副進行使用。本文選用柱式負荷傳感器為研究對象,主要討論球面-平面接觸副對其方位誤差的影響。
在被測載荷存在傾角的情況下,球頭接觸副能依賴其球面結構,通過球面滾動有效調節被測載荷作用區域,使其盡可能貼近彈性體軸線,減小傳感器所受附加彎矩。裝配球面-平面球頭接觸副的情況如圖3所示。
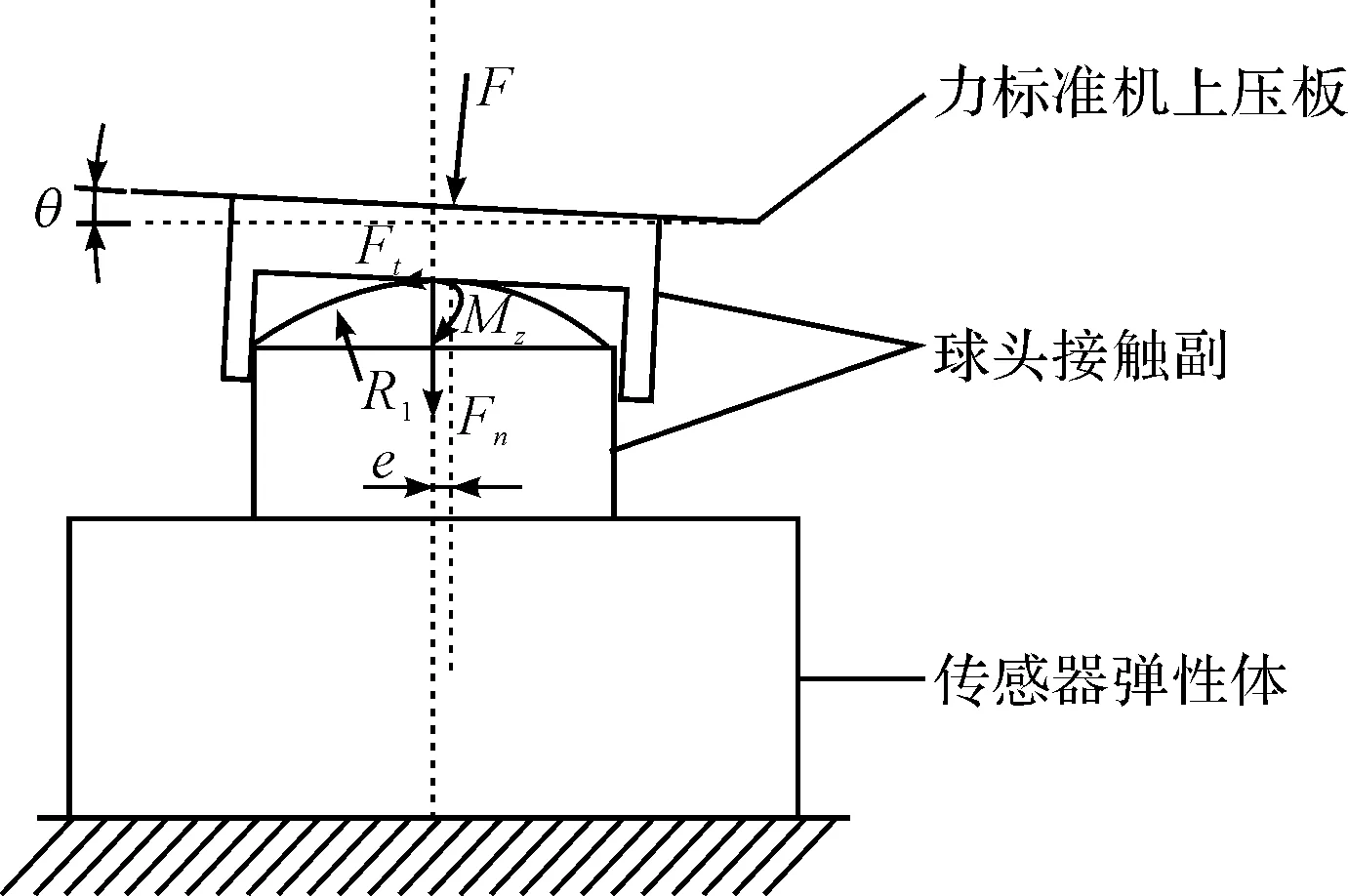
圖3 球面-平面球頭接觸副作用效果圖
施加傾載F時,力標準機上壓板將與接觸副壓頭上一點先接觸,由于接觸副球頭與壓頭間的相對滾動,使得被測載荷作用點貼近彈性體軸線,此時傾載F簡化為橫向載荷Ft、與彈性體軸線重合的豎直載荷Fn及附加彎矩Mz作用于傳感器上:
e=R1sinθ
(13)
式中:R1—接觸副球頭球徑,mm。
聯立公式(8,12,13)可得:
(14)

μ[1.5-sin(30°+β)-cosβ]}×100%
(15)
由此可以看出:在同一被測傾載F作用下,即θ不變的情況下,傳感器所受附加彎矩Mz隨著球頭球徑R1的減小而減小,方位誤差b也將隨之減小。裝配同一球頭接觸副時,即R1不變的情況下,傳感器所受附加彎矩Mz隨著被測載荷傾角θ的減小而減小,方位誤差b也將隨之減小。
1.4 球頭接觸副尺寸及材料參數確定
球頭接觸副的材料多選用40CrNiMo、0Cr17Ni4Cu4Nb等優質鋼材,考慮到其滾動體的外形特征及大負載工作條件,本研究決定選取優質軸承鋼GCr15SiMn作為球頭接觸副加工材料。
GCr15SiMn適用于加工球徑大于50 mm的滾動體。其部分材料屬性如表1所示[12]。

表1 GCr15SiMn材料屬性
參考市場主流300 kN柱式負荷傳感器的球頭接觸副球面尺寸可知:其球頭球徑R1多分布于100 mm~400 mm區間內,為了盡可能完整地覆蓋該尺寸區間,決定對R1=150 mm、200 mm、250 mm、300 mm、350 mm的5組球面-平面球頭接觸副開展研究。
2 有限元仿真分析
2.1 有限元模型的建立
為了研究球頭接觸副球面尺寸變化對傳感器所受附加彎矩的影響規律,本研究在ABAQUS中建立傳感器有限元模型進行仿真分析。
被測傳感器彈性體材料為40CrNiMo,其部分材料屬性如表2所示。

表2 40CrNiMo材料屬性
建立的有限元網格模型如圖4所示。

圖4 傳感器有限元網格模型
圖4中,力標準機上壓板設置為剛體,由S1代替;接觸副壓頭與接觸副球頭由S2、S3代替,傳感器彈性體由S4代替。S2、S3選用主從接觸算法,將表面加工硬度較大的S2內表面設為接觸主面,表面加工硬度較小的S3外表面設為接觸從面。根據主從面網格劃分規律,對從面的網格劃分較之主面更為細密[13]。
模型各部件主要幾何參數如表3所示。
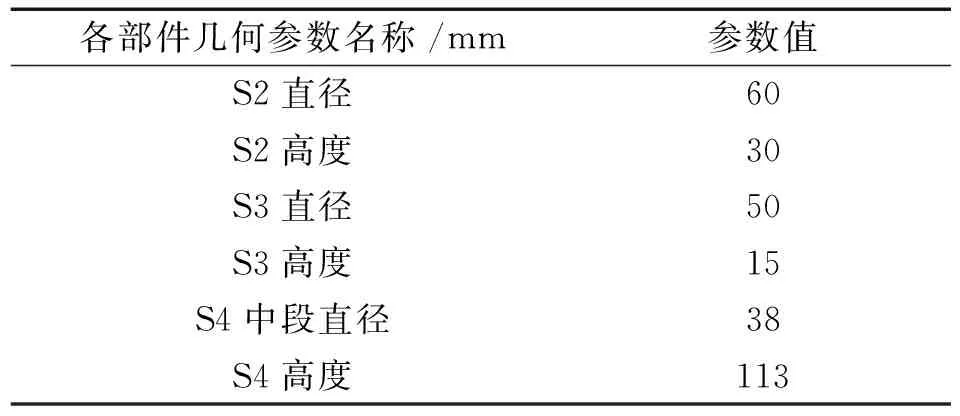
表3 模型各部件主要幾何參數
本研究采用C3D8R八節點三維實體單元進行模型網格劃分,共劃分87 840個單元,96 167個結點。為了模擬被測載荷相對彈性體軸線存在傾角θ的情況,在S2、S3、S4裝配后將其繞z軸旋轉θ,S1下表面相對xz面平行且與S2上表面邊線上一點接觸。
根據柱式負荷傳感器在力標準機上的實際加載情況進行模型邊界條件的設置[14]:S4下表面定義全約束(U1=U2=U3=0);S1上表面圓心處的參考點RP-1約束除Y方向以外的2個自由度(U1=U3=0);S1上表面施加合力為300 kN且垂直加載面的均布載荷。在傾角θ設為0.5°及1°的情況下分別裝配5組球頭接觸副進行仿真分析。
2.2 有限元解與理論解的比較及分析
為了便于提取仿真分析結果,筆者于S4上定義過軸線且法線垂直于Z軸的截面,輸出并比較不同傾載下、裝配不同尺寸球頭接觸副時該截面所受彎矩,以此衡量傳感器方位誤差的大小。
裝配不同球面尺寸的球頭接觸副時,在300 kN 0.5°及300 kN 1°傾斜載荷作用下傳感器所受附加彎矩的變化曲線如圖5所示。圖中顯示,有限元解數值變化規律與理論解數值變化規律相符:在同一傾載F作用下,傳感器所受附加彎矩Mz的大小隨著球頭球徑R1的減小而減小,因此傳感器方位誤差b也隨之減小;裝配同一球頭接觸副時,傳感器所受附加彎矩Mz的大小隨著被測載荷傾角θ的減小而減小,因此傳感器方位誤差b也隨之減小。
理論解與有限元解之間存在誤差的原因在于:理論求解時,球頭接觸副視為理想運動狀態,發生無變形相對滾動,接觸副球面尺寸不變化;有限元仿真時,球頭接觸副在相對滾動的過程中受壓變形,接觸副球頭球徑R1動態變化并增大,導致被測載荷作用點偏心距e增大,則傳感器所受附加彎矩Mz增大,因此有限元解大于理論解,但更接近于真實情況。
球頭球徑R1對傳感器所受附加彎矩Mz的影響規律如圖5所示。
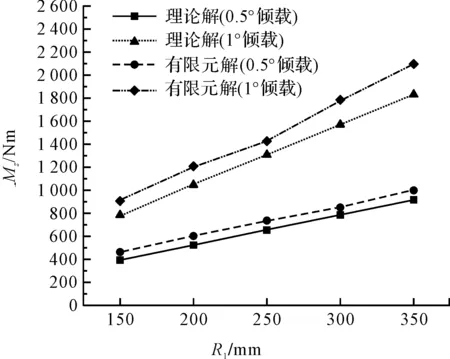
圖5 球頭球徑R1對傳感器所受附加彎矩Mz的影響規律
3 實驗驗證
3.1 傳感器方位誤差測量要求
為檢驗球頭接觸副減小傳感器方位誤差的作用,并驗證理論解及有限元數值解規律的準確性。現筆者根據《GB 13634-2008-T 單軸試驗機檢驗用標準測力儀的校準》[11],采用300 kN疊加式力標準機對被測傳感器進行負荷特性測量。
參照該標準,本研究對傳感器預加3次額定試驗力,在額定試驗力保持30 s。開始測試時,均勻選擇10個檢測點,按試驗力遞增順序逐點進行檢測。在每級試驗力加載完畢后,保持30 s,記錄讀數值,直到額定試驗力,然后卸除試驗力,在該角度方位重復測量一次。隨后,將傳感器繞其主軸線依次轉到120°、240°方位,在新的角度方位上預加額定試驗力一次并保持30 s,按試驗力遞增再遞減檢測一遍。利用公式(10~11)求得傳感器方位誤差。
3.2 未裝配球頭接觸時方位誤差測量值
本研究在未裝配球頭接觸副的情況下,分別施加傾角θ為0°、0.5°、1°的300 kN實驗力級對傳感器方位誤差進行測量。為了實現施加傾載的測試條件,本研究通過銷軸在實驗基準臺上裝配傾角為θ的斜臺,再將被測傳感器對中裝配于斜臺之上,模擬被測載荷傾斜的情況。
被測傳感器方位誤差b如表4所示。

表4 被測傳感器方位誤差b(未裝配球頭接觸副)
3.3 裝配球頭接觸副時方位誤差測量值
本研究在被測傳感器上裝配上述5組球面-平面球頭接觸副重復傳感器方位誤差的測量。實驗同樣分3次開展,分別施加傾角θ為0°、0.5°、1°的300 kN實驗力級,測量結果如表5所示。

表5 被測傳感器方位誤差b/%(裝配球頭接觸副)
3.4 測量結果的比較與分析
比較表(4,5)可知,傳感器在裝配球頭接觸副的情況下,其方位誤差測量值小于未裝配球頭接觸副時的測量值。通過計算可得,當θ=0°時,傳感器方位誤差減小了7.776%~52.220%;當θ=0.5°時,傳感器方位誤差減小了35.459%~72.260%;當θ=1°時,傳感器方位誤差減小了61.846%~81.936%。
不同傾載作用下,傳感器裝配5組球面-平面球頭接觸副時方位誤差測量值如圖6所示。

圖6 方位誤差測量結果
由此可知,在同一被測傾載F作用下,隨著接觸副球頭球徑R1的減小,傳感器方位誤差b也隨之減小。裝配同尺寸球頭接觸副即R1相等時,隨著被測載荷傾角θ的減小,傳感器方位誤差b也隨之減小。
不同傾載作用下,傳感器裝配5組球面-平面球頭接觸副時方位誤差測量值的減小比例(相較于未裝配球頭接觸副時的測量值)如圖7所示。

圖7 傳感器方位誤差減小比例
由此可知,在同一被測傾載F作用下,隨著接觸副球頭球徑R1的減小,傳感器方位誤差減小比例k增大,球頭接觸副減小傳感器方位誤差b的效果愈發顯著;裝配同尺寸球頭接觸副即R1相等時,隨著被測載荷傾角θ的增大,傳感器方位誤差減小比例k增大,球頭接觸副減小傳感器方位誤差b的效果愈發顯著。
通過實驗測量結果可知,球面-平面球頭接觸副能顯著減小柱式負荷傳感器的方位誤差。在同一被測傾載F作用下,當球頭球徑R1越小時,傳感器方位誤差b越小。裝配同尺寸球頭接觸副即R1相等時,隨著被測載荷傾角θ的減小,傳感器方位誤差b也隨之減小。球頭球徑R1對傳感器方位誤差b的影響規律驗證了理論解及有限元仿真結果。
4 結束語
本研究采用理論公式推導、有限元仿真分析及傳感器負荷特性試驗等方法,得到了球面-平面球頭接觸副對柱式負荷傳感器方位誤差的影響規律:
(1)當被測載荷相對傳感器軸線存在傾角時,得益于球頭接觸副之間的球面滾動調節作用,使得載荷作用區域能更好地貼近于傳感器軸線,有效抑制了附加彎矩的產生。相較于未裝配球頭接觸副的情況,球面-平面球頭接觸副能有效減小柱式負荷傳感器的方位誤差,保證傳感器具有良好的負荷特性;
(2)對于球面-平面球頭接觸副,在同一被測傾載F作用下,隨著球頭球徑R1的減小,其對傳感器所受附加彎矩Mz的抑制效果愈發明顯,對傳感器方位誤差b的改善效果愈發顯著;
(3)裝配同尺寸球頭接觸副即R1相等時,隨著被測載荷傾角θ的減小,傳感器所受附加彎矩Mz及其方位誤差b也隨之減小。
此外,為了進一步分析球面-平面球頭接觸副對傳感器方位誤差等負荷特性的影響,接下來本文將對接觸副球面硬度等因素開展進一步的實驗和分析。
參考文獻(References):
[1] 林鴻志,吳建偉,楊 莉,等.柱式傳感器傾斜誤差問題初探[J].衡器,2016,45(1):36-38.
[2] 姚進輝.組合式負荷傳感器方位誤差的減小[J].中國計量,2013(3):74-76.
[3] BRAY A, BARBATO G, FRANCESCHINI F, et al. Rotational and end effects: a model for uncertainty evaluation in force measurements by means of dynamometers[J].Measurement,1996,17(4):279-286.
[4] PETERS M. Limits to the uncertainty achievable in force transfer[J].Measurement,1984,2(4):197-202.
[5] FERRERO C. The measurement of parasitic components in national force standard machines[J].Measurement,1990,8(2):66-76.
[6] NIEHE S. A new force measuring facility for the range of 10 mN to 10 N[C]. Proc of the XVII IMEKO World Congress, Dubrovnik: [s.n.],2003.
[7] NIEHE S. Force measuring facility from the range of 1 mN to 10 N[J].MetrologySocietyofIndia,2005,20(3):239-248.
[8] ANDRAE J, HONS C, SAWLA A. High precision force transducer with new method for online compensation of parasitic effects[J].Measurement,2003,33(2):173-178.
[9] KANG D I, HONG C S. Rotation effects of force transducers on the output of a build-up system[J].Measurement,1994,14(2):147-156.
[10] 潘 煉.傳感器原理及應用[M].北京:電子工業出版社,2012.
[11] GB 13634-2008-T.單軸試驗機檢驗用標準測力儀的校準[S].北京:中國計量出版社,2008.
[12] 鐘順思,王昌生.軸承鋼[M].北京:冶金工業出版社,2000.
[13] 陳開顏,宋筆鋒,喻天翔,等.滾珠式操縱軟軸中滾珠接觸應力分析[J].機械科學與技術,2016(2):171-175.
[14] 韋鐵平,楊曉翔,姚進輝,等.一種新的疊加系統旋轉效應的評估指標[J].福州大學學報,2015,43(6):796-801.