自由站立式立管頂部及底部連接裝置試驗系統的研制與數值模型優化*
2018-05-04 12:51:16譚瑞龍段夢蘭汪志明雍倩文
中國海上油氣 2018年2期
譚瑞龍 段夢蘭 汪志明 何 寧 雍倩文
(1. 中國石油大學(北京)石油工程學院 北京 102249;2. 中國石油大學(北京)海洋工程研究院 北京 102249; 3. 海洋石油工程股份有限公司 天津 300451)
立管系統是海上油氣田開發的重要組成部分,是連接水下和水面部分的重要通道,在深水油氣田開發中起著重要作用[1]。隨著油氣勘探開發逐漸由淺水走向深水,立管系統面臨的技術挑戰和所需成本均迅速增加[2]。自由站立式立管作為深水油氣開發中的一種先進立管形式,得到了越來越多的關注[3]。自由站立式立管(FSHR)通常又稱為混合立管或塔式立管,其主要包含空氣罐、連接頂部連接裝置和空氣罐的鋼鏈、頂部連接裝置、連接浮式生產儲油卸油裝置(FPSO)和頂部連接裝置的柔性跨接管、立管主體、底部連接裝置、立管基礎及連接PLET和立管底部連接裝置的剛性跨接管。自由站立式立管作為一種有效的立管系統,在墨西哥灣、西非海域以及巴西海域等深水和超深水油田開發項目中得到了大量應用[4-5]。
對于立管系統,國內外學者進行了大量的研究,涉及了立管系統的靜態和動態響應、內外流的影響以及管土的相互作用[6-9]。何寧 等[10]建立了深水鋼懸鏈線立管三維有限元分析模型,對深水鋼懸鏈線立管系統在波浪、海流和浮體運動等載荷單獨作用和共同作用下的響應特征進行了分析;吳學敏 等[11]開展了深水頂張式立管參數振動與渦激振動耦合振動分析方法研究,提出了深水頂張式立管參數振動與渦激振動耦合的振動模型。
目前,針對自由站立式立管的研究大多集中在整體強度分析及疲勞分析,研究對象局限于自由站立式立管整體,分析方法都采用理論與有限元軟件數值模擬計算。例如,康莊 等[12-14]應用有限元計算探討了自由站立式立管總體設計、總體強度、敏感性參數、總體運動疲勞問題;CHEN Haifei等[15]采用有限元程序對典型混合立管進行了參數分析,研究了在海流的作用下浮箱的直徑、長度、潛水深度及柔性管的長度等參數對立管靜力平衡位形的影響。
頂部和底部連接裝置是自由站立式立管系統中的關鍵連接部件和主要受力部件,其結構形式和受力狀態均較為復雜。由于所受載荷的復雜性和不確定性,理論分析方法只能在一定程度上預測頂部和底部結構的力學行為,數值模擬的計算結果受計算模型的選擇影響較大,無法驗證數值模擬結果的正確性,因此相應的試驗技術成為該領域研究的必要手段。針對上述問題,本文自主研制出了一套能夠真實模擬頂部和底部連接裝置所受載荷和運動,進而實現對頂部和底部連接裝置相關功能和性能指標檢驗的自由站立式立管原理樣機試驗裝置,并通過該裝置對自由站立式立管頂部及底部裝置數值計算模型進行了修正與驗證,為以后大量的計算分析提供了準確可靠的方法,對于保障自由站立式立管系統的作業安全具有重要意義。
1 模型試驗的相似關系
1.1 模型試驗相似準則
相似理論是模型試驗設計方法的理論基礎,是定量試驗中保證結果準確性的關鍵[16]。自由站立式立管系統相似關系具體推導過程為:首先建立自由站立式立管系統模型,從而確定自由站立式立管系統模型試驗物理量,確定試驗系統因變量與導出量,進而研究各物理量之間的內在聯系;然后確定自由站立式立管模型系統相似準則;最后形成自由站立式立管模型試驗理論體系。
自由站立式立管系統中力控制方程為
F=f(l,v,ρ,μ,g)
(1)
式(1)中:l為長度;v為速度;ρ為密度;μ為黏度;g為重力加速度。
在本次試驗過程中模型系統和原型系統之間各參數滿足如下關系:
(2)
(3)
式(2)、(3)中下標m及p分別表示模型系統和原型系統,則有
(4)
(5)
1.2 模型試驗相似比確定
在比例尺選擇上,模型試驗的縮尺比在1∶1~1∶70之間都是允許的,自由站立式立管系統關鍵設備試驗要求縮尺比不小于1∶10。考慮到小尺寸試件的結構、受力和制作均與原型實際結構不同,特別是大尺寸試件和小尺寸試件焊接殘余應力差別較大,會使試驗數據準確性較差,為縮小這種差別,盡可能設計出與實際結構相當的試件。
該試驗所使用的六自由度振動平臺的高度為2.2 m,平臺動態加載周期為1~5 s,平臺加載能力見表1。原尺寸頂部結構高度約為11 m,考慮縮比之后為頂部邊界加載預留空間以及該六自由度振動平臺的加載能力,本試驗裝置采用1∶7的幾何縮尺比,縮比之后靜態及動態的加載參數均不超過六自由度振動平臺的加載能力,滿足靜態及動態試驗要求。
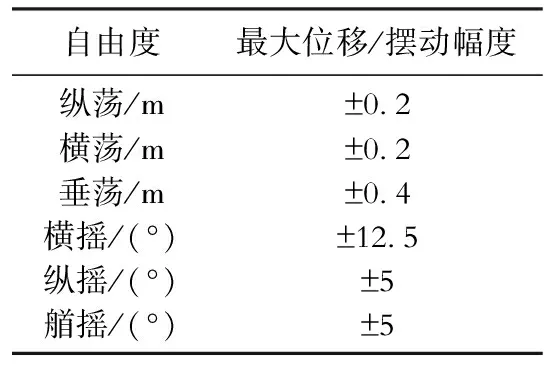
表1 六自由度振動平臺加載能力
頂部連接裝置樣機主體尺寸可控制在1.1 m×0.7 m×1.575 m的范圍內,底部連接裝置樣機主體尺寸可控制在0.76 m×0.28 m×0.65 m的范圍內,頂部連接裝置樣機質量縮比后為113.4 kg,底部連接裝置樣機質量縮比后為35.9 kg。按照相似準則,得到原型與原理樣機的相似比見表2。
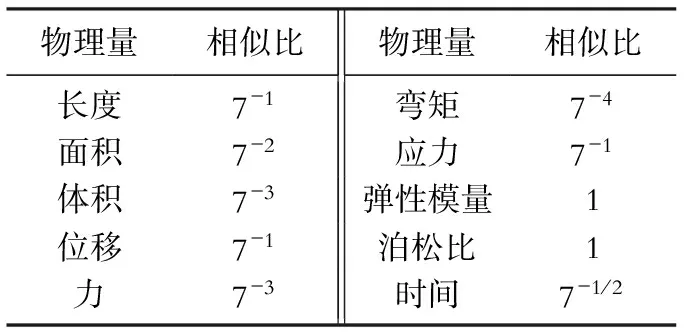
表2 模型試驗各物理量的相似比
2 模型試驗裝置的研制
2.1 總體設計
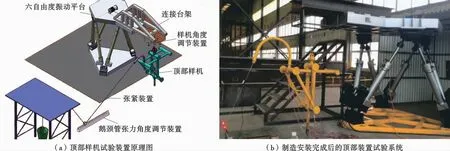
圖1 自由站立式立管頂部連接裝置原理樣機試驗裝置
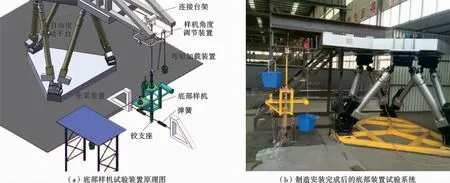
圖2 自由站立式立管底部連接裝置原理樣機試驗裝置
自由站立式立管頂部和底部連接裝置原理樣機試驗裝置分別如圖1、2所示,該套裝置包括加載裝置、原理樣機角度調節裝置、鵝頸管張力角度調節裝置、恒張力裝置、彎矩加載裝置及邊界固定裝置。其中,加載裝置包括六自由度振動平臺、伺服電機、減速機、輥筒及控制裝置,加載裝置通過鋼絲繩與原理樣機相連接;原理樣機角度調節裝置包括手搖絞盤和調節架;鵝頸管張力角度調節裝置包括滑輪與導軌;恒張力裝置包括立架、滑輪與配重桶;彎矩加載裝置包括2個配重桶和連接架;邊界固定裝置由2個三角架及水平放置的2根彈簧組成。
2.2 試驗加載系統
2.2.1運動加載系統
試驗所用六自由度振動平臺如圖3所示,通過該平臺可加載試驗過程中頂部及底部連接裝置的位移載荷。根據所提供的頂部浮筒及底部立管在海水中的響應情況,將各個自由度內的運動情況輸入到振動臺,即可模擬浮筒和立管的運動。

圖3 六自由度振動平臺
2.2.2力加載系統
模型試驗自主設計了恒張力加載系統(圖4),保證在六自由度振動平臺運動過程中加載到樣機上的張力恒定。加載系統由同步伺服電機、運動控制器、伺服驅動器、行星減速機及輥筒組成。該系統通過控制同步伺服電機轉速控制張力大小,可加載張力大,產生載荷穩定可靠,控制精度高。
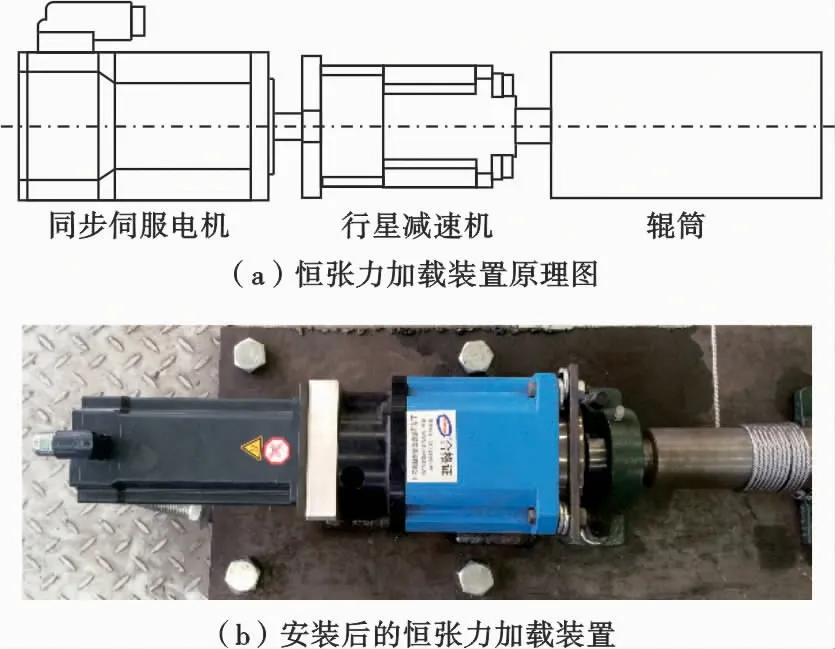
圖4 恒張力加載裝置
2.3 輔助調節系統
原理樣機角度調節裝置如圖5所示,該裝置由手搖絞盤、調節架和鋼架組成,通過手搖絞盤的旋轉調節鋼架與調節架的距離,從而調節樣機的角度。該裝置可實現調節角度的連續變化,控制精度高。
鵝頸管張力角度調節裝置如圖6所示,通過滑輪在導軌上的不同位置實現鋼絲繩的角度調節,從而實現張力角度的調節。
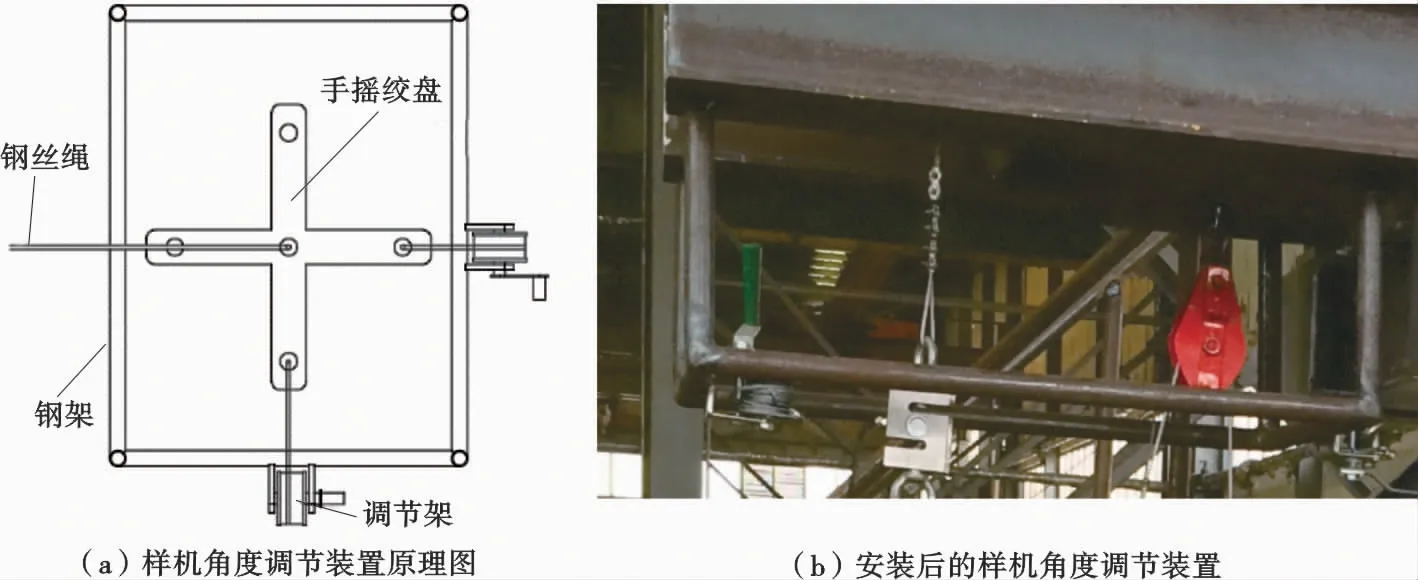
圖5 原理樣機角度調節裝置
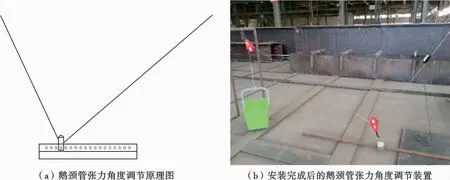
圖6 鵝頸管張力角度調節裝置
3 試驗系統應用與數值計算驗證
3.1 自由站立式立管頂部及底部連接裝置試驗參數
采用所研制的試驗裝置對自由站立式立管頂部及底部連接裝置開展運動響應試驗,試驗的關鍵點在于如何獲取試驗所需的自由站立式立管頂部及底部連接裝置的關鍵受力情況。考慮自由站立式立管總體偏轉角度、跨接管在頂部連接裝置和FPSO側的懸掛角度以及環境載荷,選擇從遠向、近向、左橫向和右橫向等4個方向角入射時不同工況組合共88種,通過OCAFLEX數值模擬計算88種工況,分析頂部及底部連接裝置的關鍵受力情況,將88中工況中頂部及底部連接裝置的最危險工況作為試驗工況,從而得到試驗所需的自由站立式立管頂部及底部連接裝置的關鍵受力情況如圖7所示,具體工況的參數值見表3。
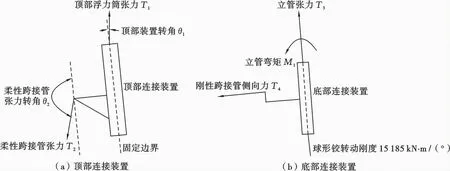
圖7 自由站立式立管頂部及底部連接裝置的關鍵受力情況
參數數值T1/kN10 83θ1/(°)3 06T2/kN0 65θ2/(°)159T3/kN5 2872T4/kN0 1990M1/(kN·m)0 0179
3.2 數值計算模型
自由站立式立管頂部連接裝置有限元計算模型如圖8所示。修正前模型主體框架采用四面體實體單元SOLID285,鵝頸管簡化為剛體梁單元MPC184;修正后的計算模型主體框架采用梁單元BEAM188,框架兩端端部采用殼單元SHELL281。修正后模型增加AB立管段防止邊界效應,將CD鵝頸管段由優化前的剛體單元改為梁單元參與計算。修正后的模型網格數量較修正前少,計算資源占用少。
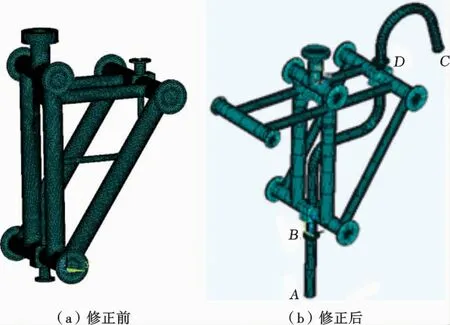
圖8 自由站立式立管頂部連接裝置的有限元模型
圖9為自由站立式立管底部連接裝置有限元計算模型,修正前模型框架采用BEAM188,修正后的計算模型主體框架采用梁單元BEAM188,框架兩端端部采用殼單元SHELL281。修正后模型增加FG立管段防止邊界效應;修正前E點的應力接頭存在過度簡化,修正后采用過渡接頭更加符合實際結構;修正后H點邊界條件由固定邊界改為固定扭轉剛度的球形接頭。修正后的模型各部件功能更完整,更加接近真實結構。
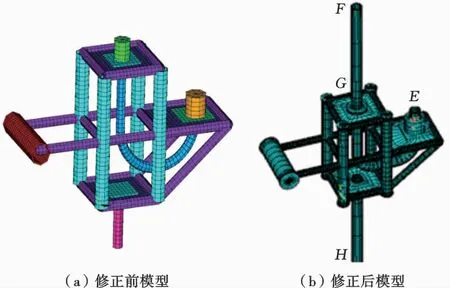
圖9 自由站立式立管底部連接裝置的有限元模型
3.3 試驗與數值計算結果對比分析
開展自由站立式立管頂部和底部連接裝置靜態及動態試驗與數值計算,分別在頂部連接裝置及底部連接裝置布置7個測點(圖10,引線指示處為測點)測其應變,每組試驗進行3次取平均值,最終得到自由站立式立管頂部和底部連接裝置的靜態試驗與數值計算結果對比,見表4、5。從表4、5可以看出,該試驗裝置在進行自由站立式立管頂部及底部連接裝置靜態試驗時結果穩定性較好,表明可以通過該裝置測得關鍵位置應力,從而為優化自由站立式立管系統頂部及底部關鍵設備提供參考。通過靜態試驗結果與數值計算結果對比可知,修正后的數值模型計算結果與試驗結果誤差不超過6.82%,表明修正后的數值模型能夠較準確地反映頂部與底部靜態響應。
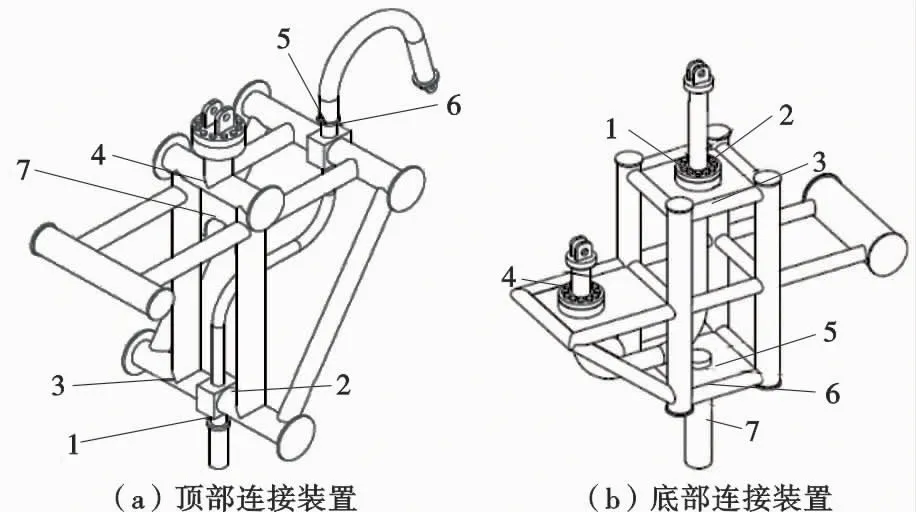
圖10 自由站立式立管頂部及底部連接裝置測點分布
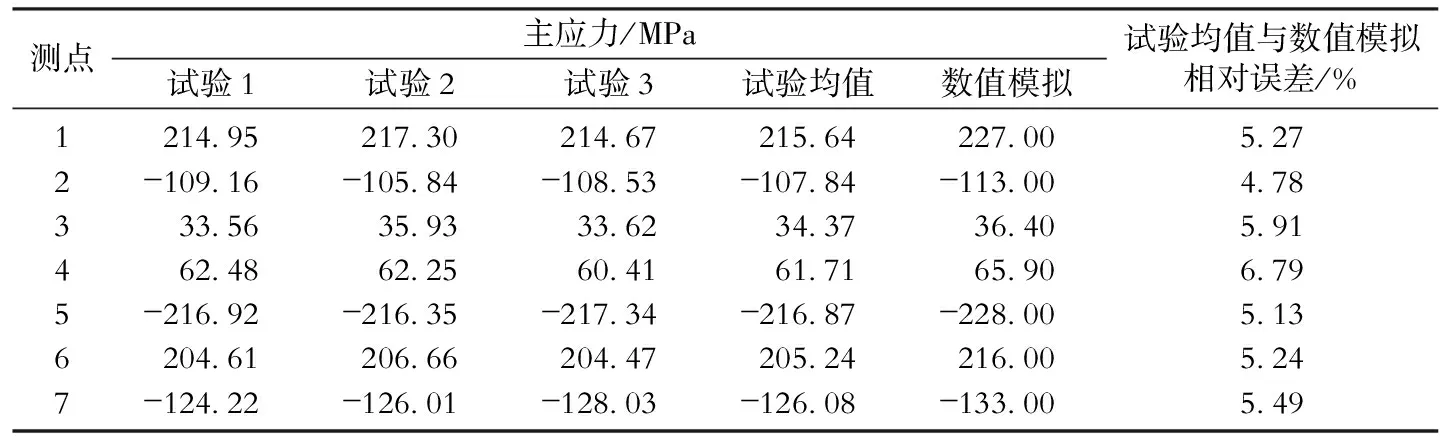
測點主應力/MPa試驗1試驗2試驗3試驗均值數值模擬試驗均值與數值模擬相對誤差/%1214 95217 30214 67215 64227 005 272-109 16-105 84-108 53-107 84-113 004 78333 5635 9333 6234 3736 405 91462 4862 2560 4161 7165 906 795-216 92-216 35-217 34-216 87-228 005 136204 61206 66204 47205 24216 005 247-124 22-126 01-128 03-126 08-133 005 49
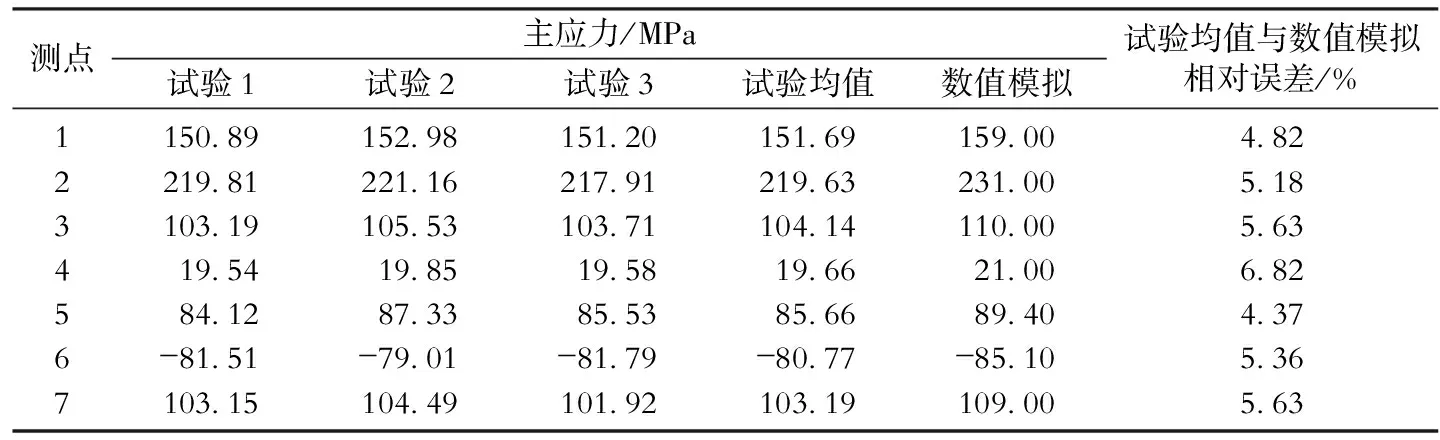
表5 自由站立式立管底部連接裝置靜態試驗與數值計算結果

圖11 自由站立式立管頂部連接裝置不同測點主應力隨時間變化
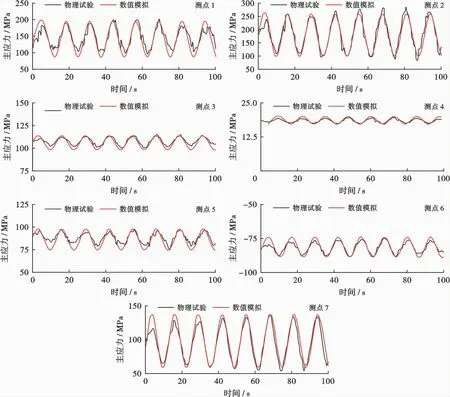
圖12 自由站立式立管底部連接裝置不同測點主應力隨時間變化
自由站立式立管頂部和底部連接裝置不同測點動態試驗結果與數值計算結果分別如圖11、12所示。從圖11、12可以看出,該試驗裝置在進行自由站立式立管頂部及底部連接裝置的動態試驗時所得結果充分反映了關鍵點應力在外力作用下的變化,為自由站立式立管關鍵設備的動態強度及疲勞強度的驗證及優化提供了計算方法與依據。通過動態試驗與數值計算結果對比可知,試驗結果與數值計算結果吻合較好,表明修正后的數值模型能夠較準確地反映出自由站立式立管頂部及底部連接裝置動態響應。
在頂部連接裝置樣機7個測點中,測點1、5、6主應力較大,可以適當增加管徑和壁厚或減小鵝頸管曲率半徑來降低該點應力;測點3、4主應力較小,可以適當減小管徑和壁厚來減小頂部連接結構自重,實現最優化設計。在動態試驗中,頂部連接裝置樣機測點1的應力隨時間變化非常大,在疲勞強度的設計與校核中應當重點考慮。在底部連接裝置樣機7個測點中,測點2主應力較大,可以適當增加管徑和壁厚來實現降低應力;測點4的主應力較小,可以適當減小管徑或壁厚來減小自重,實現最優化設計;在動態試驗中,測點1、2、7的應力隨時間變化非常大,在疲勞強度的設計與校核中應當重點考慮。
4 結論
1) 以相似理論為基礎,研制出了適用于自由站立式立管頂部及底部連接裝置原理樣機試驗裝置,利用六自由度振動平臺可以真實模擬實際工況下結構的運動,利用自主設計的恒張力裝置能夠真實模擬結構的受力。
2) 使用該試驗裝置對自由站立式立管頂部及底部連接裝置進行了靜態及動態試驗,所得靜態及動態結果穩定性較好,表明可以通過該裝置測得關鍵位置的主應力,進而優化自由站立式立管系統頂部及底部關鍵設備。
3) 使用試驗結果驗證后的數值模型能夠很好地反映自由站立式立管頂部及底部連接裝置靜態及動態響應,可以為自由站立式立管關鍵設備的動態強度及疲勞強度的驗證及優化提供可靠的計算方法和依據。
試驗結果與數值計算結果對比分析表明,對于頂部連接裝置,可通過增加與立管連接處的管徑和壁厚或減小鵝頸管曲率,減小主框架管徑和壁厚,實現最優化設計;對于底部連接裝置,可通過增加與立管連接處的管徑和壁厚,減小與跨接管連接處管徑或壁厚,實現最優化設計。
[1] 張長智,王桂林,段夢蘭,等.深水開發中的幾種新型混合生產立管系統[J].石油礦場機械,2010,39(9):20-25.
ZHANG Changzhi,WANG Guilin,DUAN Menglan,et al.Introduction to the novel hybrid risers in deepwater oil&gas development[J].Oil Field Equipment,2010,39(9):20-25.
[2] WANG J L,DUAN M L.A nonlinear model for deepwater steel lazy-wave riser configuration with ocean current and internal flow[J].Ocean Engineering,2015,94:155-162.
[3] CHEN Haifei,XU Sipeng,GUO Haiyan.Parametric study of global response behavior of deepwater free standing hybrid risers[J].Journal of Ship Mechanics,2011,15(9):996-1004.
[4] HATTON S A,HOWELLS H.Catenary and hybrid risers for deepwater locations worldwide -1 - catenary and hybrid risers for deepwater locations worldwide [C].Advances in Riser Technologies.Aberdeen,1996.
[5] ALLIOT V,LEGRAS L.Lessons learned from the evolution and development of multiple lines hybrid riser towers for deep water production applications[R].OTC 17683,2005.
[6] CHATJIGEORGIOU I K.On the effect of internal flow on vibrating catenary risers in three dimensions[J].Engineering Structures,2010,32(10):3313-3329.
[7] CHATJIGEORGIOU I K.Three dimensional nonlinear dynamics of submerged,extensible catenary pipes conveying fluid and subjected to end-imposed excitations[J].International Journal of Non-Linear Mechanics,2010,45(7):667-680.
[8] ATHISAKUL C,MONPRAPUSSORN T,CHUCHEEPSAKUL S,et al.A variational formulation for three-dimensional analysis of extensible Marine riser transporting fluid[J].Ocean Engineering,2011,38(4):609-620.
[9] ATHISAKUL C,PHANYASAHACHAR T,KLAYCHAM K,et al.Static equilibrium configurations and appropriate applied top tension of extensible marine riser with specified total arc-length using finite element method[J].Engineering Structures,2012,34(1):271-277.
[10] 何寧,王波,王輝,等.深水鋼懸鏈線立管三維動力分析[J].中國海上油氣,2010,22(2):129-133.
HE Ning,WANG Bo,WANG Hui,et al.Three-dimensional dynamic analysis of deepwater SCR[J].China Offshore Oil and Gas,2010,22(2):129-133.
[11] 吳學敏,黃維平,滕文剛.深水頂張式立管參數振動與渦激振動耦合振動分析方法研究[J].中國海上油氣,2014,26(4):100-105.
WU Xuemin,HUANG Weiping,TENG Wengang.Study on analysis method for coupled vibration of parameter excited vibration and vortex-induced vibration on deep water top-tensed riser[J].China Offshore Oil and Gas,2014,26(4):100-105.
[12] 康莊,李輝,孫麗萍,等.自由站立式立管總體強度及敏感性參數分析[J].船舶工程,2011,33(5):73-78.
KANG Zhuang,LI Hui,SUN Liping,et al.Global strength and sensitivity parameters analysis of free standing hybrid riser[J].Ship Engineering,2011,33(5):73-78.
[13] 康莊,李輝,孫麗萍,等.自由站立式立管總體設計與分析[J].船海工程,2011,40(5):154-159.
KANG Zhuang,LI Hui,SUN Liping,et al.General design and analysis of the free standing hybrid riser[J].Ship & Ocean Engineering,2011,40(5):154-159.
[14] 康莊,李輝,孫麗萍,等.自由站立式立管總體運動疲勞分析[J].海洋工程,2011,29(4):43-50.
KANG Zhuang,LI Hui,SUN Liping,et al.Free standing hybrid riser global motion fatigue analysis[J].The Ocean Engineering,2011,29(4):43-50.
[15] CHEN Haifei,XU Sipeng,GUO Haiyan.Nonlinear analysis of flexible and steel catenary risers with internal flow and seabed interaction effects[J].Journal of Marine Science and Application,2011(2):156-162.
[16] 賈杰,丁衛.力學實驗教程[M].北京:清華大學出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
