電梯頂部空間測試儀的研究
2018-05-15 11:32:21張安國嵇守航
中國特種設備安全 2018年4期
張安國 嵇守航
(大連市特種設備檢測研究院 大連 116013)
1 前言
電梯頂部空間用于保護電梯轎廂頂部人員以及電梯頂部的各種機械,所以電梯頂部的安全空間必須達到國家標準,滿足電梯安全技術規范TSG T7001(以下簡稱規則)的要求。轎廂頂部的安全空間是指對重完全壓縮對重緩沖器時,轎廂頂部的相關安全尺寸需要滿足規則附件A中3.2項的尺寸。很多建筑是完全參照標準樓層來設計,不過在后期的建造過程中,由于樓房建造偏差和后期對建筑進行修飾的需要,開發商訂購超高的轎廂,導致電梯頂部的安全尺寸比國家規定的尺寸小,這樣就必須采取有效的方法增加轎頂安全空間,這樣直接導致對重的緩沖距離必須限制在一個很小的安全范圍內。由于新的鋼絲繩伸長相對較快,使得轎廂撞弓在撞擊上極限開關前,對重已經壓到緩沖器上,這樣的設計無法符合國家標準和規則的要求。電梯維保單位有時會利用裁剪曳引鋼絲繩長度的方法增加對重緩沖距離,這種做法會使對重緩沖距離保持在較大值,但是電梯頂部安全空間會受到影響而變小。電梯檢驗人員通常會測量對重緩沖距離來判斷上極限開關是否會在對重撞擊對重緩沖器前起作用,而忽視了對重緩沖距離對電梯頂部安全空間的影響。由此可見,電梯頂部空間是十分重要又極容易被忽視的關鍵點。
關于頂部空間的測量,規則中給出一個測量方法,但是此計算方法并不明確。作者通過查閱相關文獻,得出計算方法為測量轎廂在上端站平層位置時的相應數據,對于蓄能型對重緩沖器,將測量結果減去緩沖器可壓縮行程90%與對重緩沖距離的和;對于耗能性對重緩沖器,將測量結果減去緩沖器可壓縮行程與對重緩沖距離的和,然后根據計算結果確認是否滿足要求。[1]
在對電梯頂部空間進行測量時,需要至少兩名專業人員配合,且有一名人員需要經過開層門上轎頂等一系列煩瑣且存在一定安全隱患的操作步驟進入電梯井道。測量時操作人員處于頂部的較小密閉空間內,由于電梯自身故障等原因困人事故時有發生。除此之外,電梯井道內設備、部件等排列錯綜復雜,在狹小空間內操作人員稍有疏忽便會受到傷害。因此,需要研究一種新的檢測方法,在提高檢測效率的同時保障檢驗人員的自身安全,這樣也可以讓檢驗人員更加便捷、準確地測出轎頂空間的尺寸,以確保電梯的安全運行。
本文提出的測量方法可實現人機分離操作,人員只需在井道外便可進行測量,保證了相關人員的安全。并利用編程軟件直接得出計算處理后的數據實現了便捷操作,免去了煩瑣復雜的計算。目前國內對于頂部空間測量主要方法還是人工測量和計算,安全性和便捷性都較難保證。
2 系統設計
2.1 激光測距的原理
激光測距因為其自身的特點,有著很多無與倫比的優勢:方向精確、抗干擾能力強、量程遠、大氣傳輸性好、測量速度快、測量精度高、隱蔽性好、對雨霧有一定的穿透力。
激光測距主要有兩種方法:脈沖測距和連續波相位測距。本文設計的系統則使用脈沖測距來實現電梯頂部空間各尺寸的測量。
激光脈沖測距利用光的直射性,對所測物體發射一條光脈沖,測量到物體所用時間,算出目標距離。將發射端和物體之間的距離設為D,往返所需時間為t,而光的速度為c,(c≈3×108m/s,忽略光速c在空氣中受到的影響)。根據物理學公式,式(1)成立:

使用激光脈沖測距,檢測時長按照物體所接收到的脈沖數目進行分析。具體原理如圖1所示。
設定激光振蕩頻率為f,在一段時間t內有N個時鐘脈沖進入計數器,可得:

在式(2)中,L=c/2f,L越小,則代表精度越高。[2]
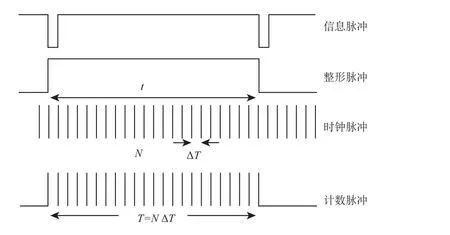
圖1 激光脈沖測距原理波形圖
2.2 ARM11開發板簡介
本課題研究的測試儀選用的是飛凌公司生產的OK6410開發板(見圖2),它是基于SAMSUNG S3C6410主處理器。該開發板運用的是“核心板與開發板”相結合的結構,而核心板和底板之間則采用品質優異的進口連接器,引腳個數為320個,這樣也方便使用者可以對開發板進行二次開發,對其進行多形式的擴展,應用更廣泛。
OK6410的軟件支持多種系統,并開放源代碼,使用者可以根據自己需要對其進行更改。而且,開發板也可連接與之相配套的WIFI模塊、藍牙模塊等。

圖2 OK6410開發板
2.3 整體設計思想
整個系統由放置于轎頂的下位機和井道外的上位機構成。下位機負責井道頂部的各部位數據的采集、存儲、傳輸以及最終的打印測試報告。上位機負責與下位機的通訊,向下位機發送測量和打印指令,以及對采集到的數據進行處理。下位機則采用SAMSUNGS3C6410作為主處理芯片的ARM1l開發板、藍牙模塊和激光測距模塊為開發的基礎。上位機采用自帶藍牙模塊的Android智能手機。系統的整個工作過程是:首先,在轎頂固定激光測距傳感器,以便由激光測距傳感器采集如圖3所示四個部位的數據信息。圖中H1代表轎廂導軌的進一步制導行程(轎廂在上端站平層時);H2代表井道頂的最低部件與曳引繩附件、導靴或滾輪、部件的最高部分或垂直滑動門的橫梁之間的間距;H3代表井道頂的最低部件與轎頂設備的最高部件之間的間距(不包括鋼絲繩附件、導靴等);H4代表轎頂可以站人的最高面積的水平面與位于轎廂投影部分井道頂最低部件的水平面之間的自由垂直距離。傳感器固定完成后將轎廂開至頂層端站平層位置,上位機通過藍牙與下位機取得連接。然后,上位機向下位機發送測量開始命令,激光測距模塊可直接輸出數字信號,經RS232串口以10位二進制編碼的形式存儲于開發板自帶的256Mb NAND FLASH中[3]。接著,上位機發送數據傳輸命令,下位機通過藍牙模塊將數據發送。上位機按照設定的程序對接收到的數據進行處理、判斷。最終,上位機向下位機發送打印命令,得到測量報告,測量完成。

圖3 電梯頂部空間示意圖
2.4 下位機設計
下位機是由四套激光測距模塊、ARM11開發板、電源模塊組成的系統,承擔現場頂部空間測量過程中的數據的實時收集,根據內部編程的設計,將數據打成數據包,利用藍牙模塊傳送到上位機,上位機發送打印指令由打印模塊負責打印測量報告。下位機框圖如圖4所示。

圖4 下位機框圖
2.5 各模塊選擇
1)激光測距模塊選用RealWave公司生產的RWRFA-5傳感器,各項參數見表1。其測量范圍為0.05~5m,滿足常見電梯頂部空間的測量要求。測量精度和分辨率均為1mm,符合規則中規定的測量數據精度。其次,傳感器可以發射640nm紅色可見激光,便于測量過程中對需要測量部位的定位。該傳感器支持RS232串口輸出數據,可實現與ARM11開發板便捷的連接。

表1 RWRFA-5傳感器的參數表
2)藍牙模塊采用BLE-CC41-A藍牙模塊,專為智能無線數據傳輸而打造。本模塊支持UART接口,可與ARM11開發板實現無縫對接,具有成本低、體積小、功耗低、收發靈敏性高等優點。藍牙4.0版本可以實現100m以上超長距離數據傳輸,即使在電梯井道的復雜環境中受多種因素干擾,亦可滿足本系統的數據傳輸要求。
3)打印機模塊選用EH48-B熱敏式點陣打印模塊。該模塊采用DC 5V供電,打印速率可達60mm/s,打頭壽命約為50km,可通過TTL串口與ARM11開發板連接,從而實現高速、便捷、持久輸出測試結果。[4]
2.6 上位機軟件設計
本課題利用C語言編寫應用于智能手機Android系統下的顯示、計算軟件,實現對下位機發送測量、打印等相關指令,顯示測量結果的功能,程序框圖如圖5所示。

圖5 C語言程序框圖
3 系統技術性能及指標
1)系統測量范圍0.05m至5m。
2)測量精度±1mm。
3)智能手機遙控距離≤20m,數據接收距離≤100m。
4)綜合測量誤差≤1%。
4 儀器的使用及測量結果
使用儀器時,檢驗人員先進入轎頂,對實際情況進行初步判斷,將四個傳感器通過傳感器固定夾垂直安裝在轎頂H1、H2、H3與H4處,然后檢驗人員離開轎頂,通過上位機發送指令,進行測量和數據打印等操作。
本儀器對多個品牌的不同額定速度的電梯頂部空間進行測量(部分測量結果見表2),同時按照規則中要求的測量方法進行測量和計算,比較兩者的計算結果,差距在2mm以內,結果較為滿意。在本儀器系統的技術性能和指標范圍內,適用于各類電梯頂部空間的測量。在無機房電梯的使用上效果明顯,原因是無機房電梯頂部空間相對小,檢驗人員測量不方便、危險性較大,而使用儀器進行遠程測量,可以很好地克服這些缺點。

表2 儀器多次測量結果與人工測量結果比較
5 結論
本測試儀具有安全性好、測量便捷,且不受空間以及電梯種類限制等特點。真正意義上實現機房與井道之間的遙控測量,避免了困人事故的發生,降低操作人員的風險性。但是在使用儀器時,檢驗人員能否正確選擇傳感器安裝位置,對測量結果的準確性有一定的影響。在今后的使用和儀器開發時,可以優化、更新數據通訊方式,這樣可以使得整個儀器有著更好的實時性,以及更精確的結果;硬件系統設計,主要采用模塊化設計,硬件整體有些冗余的部分,系統整體的可靠性和穩定性還有待于提高。
參考文獻
[1]常寅飛.一臺曳引驅動電梯頂部空間檢驗結果的判定[J].中國科技縱橫,2013 (17):139-140.
[2]吳應明.便攜式脈沖激光測距儀的研制[D].西安:西安電子科技大學,2009.
[3]王紅亮,符多,鐸廣威,等.基于ARM的數據采集存儲系統設計[J].火力與指揮控制,2014,39(01):120-121.
[4]陳子龍,張紅雨,李俊斌.藍牙4.0無線傳感網數據采集及以太網傳輸設計[J].電聲技術,2013,37(10):74-77.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國品牌(2019年10期)2019-10-15 05:57:12
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18