基于自抗擾控制算法的單舵輪AGV控制系統(tǒng)設計
2018-05-16 09:29:14
單片機與嵌入式系統(tǒng)應用
2018年5期
(濟南二機床集團有限公司,濟南 250022)
引 言
隨著科學技術的快速提升,工業(yè)4.0和智能工廠的概念在工業(yè)生產(chǎn)中占有了越來越重要的地位,越來越多的機器人在工業(yè)生產(chǎn)中代替人工完成了重復、單調(diào)以及危險的工作,節(jié)省人力成本的同時,提升了工作效率。壓力機行業(yè)中,由線首的拆垛機器人、板料傳送系統(tǒng)、機器人上料系統(tǒng)、壓力機間單元、線末的壓力機下料單元以及自動運料AGV小車組成的機器人沖壓自動化系統(tǒng)也得到了越來越多企業(yè)的認可[1]。AGV(Automated Guided Vehicle),即自動引導小車,是該系統(tǒng)中的一個重要組成部分,運行中背載或牽引著物料沿預設的導引路線行駛。
在復雜的車間環(huán)境中,要求AGV能夠:①準確、快速到達指定位置;②遇到障礙物時能夠自動停車;③能到達并自動識別不同的站點,然后做出相應的動作。
隨著電子技術的不斷發(fā)展,出現(xiàn)了磁條(輔以RFID站點)、慣性導航或激光導航等自動導引裝置[2],激光導航憑借其不需要地面輔助定位、可隨時改變行駛路徑的優(yōu)點,得到了廣泛的應用[3]。
本文基于激光SLAM(Simultaneous Localization And Mapping,SLAM)導航原理和自抗擾控制算法,設計了一種AGV自動控制系統(tǒng),實現(xiàn)了AGV自動路徑跟蹤控制。該系統(tǒng)只需要通過上層調(diào)度軟件更新位置坐標信息即可改變AGV行駛路徑或停靠站點。所設計的AGV控制系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
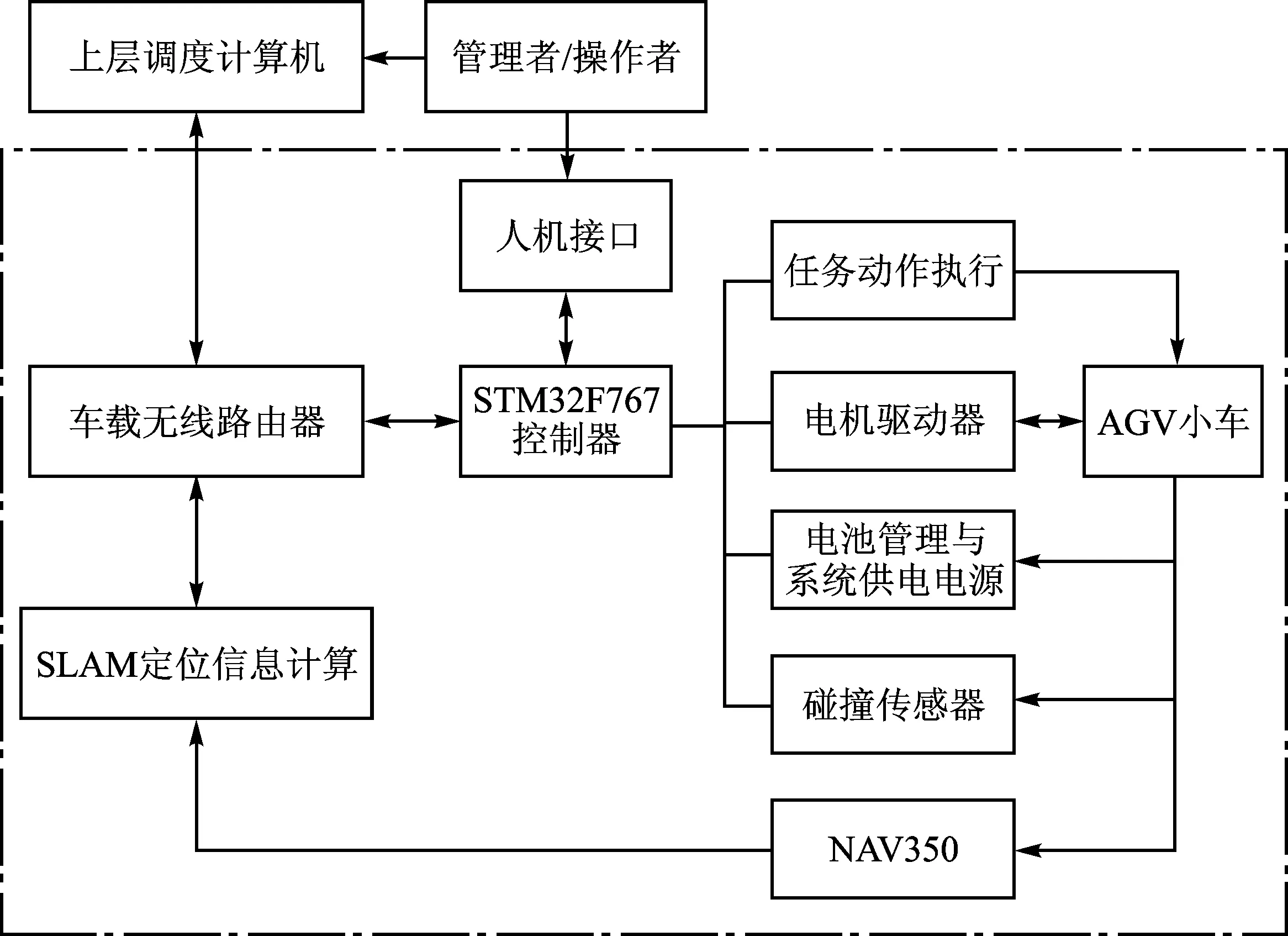
圖1 控制系統(tǒng)結(jié)構(gòu)框圖
1 單舵輪AGV運動學數(shù)學模型
本系統(tǒng)選用的AGV包含一個能控制前進方向的舵輪和兩個固定的從動輪[4-5],依靠前輪電機旋轉(zhuǎn)產(chǎn)生前進的驅(qū)動力,并由另一個電機控制前輪轉(zhuǎn)向,從而實現(xiàn)AGV方向控制,即所謂的單舵輪結(jié)構(gòu)形式,其結(jié)構(gòu)如圖2所示。……
登錄APP查看全文
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17