星基ADS-B接收機監視容量分析
2018-05-21 01:24:56劉海濤王松林秦定本李冬霞
航空學報 2018年5期
關鍵詞:系統
劉海濤,王松林,秦定本,李冬霞
中國民航大學 天津市智能信號與圖像處理重點實驗室,天津 300300
廣播式自動相關監視(ADS-B)是一種基于全球衛星定位系統和航空數據鏈的民航新一代航空器監視技術[1-3]。相對于傳統雷達監視,ADS-B監視具有成本低、監視范圍廣、監視精度高等優點,因此ADS-B在民用航空領域獲得廣泛應用。地基ADS-B系統由機載發射機及ADS-B地面站組成,且地面站沿陸地航路部署,因此地基ADS-B系統無法實現陸地偏遠地區、海洋及地球南北兩極的監視覆蓋,據文獻[4]的統計地球表面近71%的區域沒有實現航空器監視覆蓋。法航447空難及馬航370失聯事件后,為解決全球范圍內航空器的可靠監視問題,文獻[5-8]提出星基監視的概念,通過將ADS-B接收機部署于低軌道衛星中,利用多顆低軌道衛星形成覆蓋全球的星基監視系統,從而實現全球范圍內航空器的可靠監視。星基監視代表航空器監視技術的未來發展方向,其在民用航空領域具有廣泛的應用價值[9]。
目前,圍繞著星基監視,國內外研究主要集中以下3個方面:星基ADS-B技術可行性驗證,星基ADS-B系統方案及星基ADS-B系統性能評估。為了驗證星基監視技術的可行性,全球多個團隊[10-13]研制了星基ADS-B試驗裝置,并發射低軌道試驗衛星,實現了全球范圍內ADS-B信號的接收,驗證了星基監視技術的可行性。在星基ADS-B系統建設方面,Aireon公司提出了基于“銥星”的星基監視方案[14],該方案通過在“銥星”中搭載ADS-B接收機形成覆蓋全球的星基監視系統,預計2018年該系統可提供商用服務;美國全球星公司提出了ADS-B鏈路增強系統,該系統通過低軌道衛星搭載ADS-B接收機,并通過C波段鏈路將接收的ADS-B信息傳輸到地面站,最后由地面站分發給地面應用子系統[15]。在星基ADS-B系統性能評估方面,為評估共信道干擾對星基ADS-B系統報文更新間隔的影響,文獻[16]建立了星基ADS-B共信道干擾模型,并仿真研究了共信道干擾對位置報文更新間隔性能的影響,此外,文獻[17-18]也通過仿真的方法開展了類似的研究。
星基ADS-B系統是一個干擾受限的系統,系統存在共信道干擾限制了系統的監視性能,因此定量給出共信道干擾對系統監視性能的影響具有重要的意義。文獻[16-18]主要通過仿真方法給出了共信道干擾對監視性能的影響,仿真方法主要優點是構建的模型與實際系統較接近,然而該方法的缺點是缺乏嚴格的理論分析;此外文獻[16-18]僅研究了共信道干擾對報文更新間隔的影響,沒有給出共信道干擾對監視容量的影響。為克服以上工作的不足,論文首先給出星基ADS-B系統模型,然后理論分析給出星基ADS-B系統報文沖突概率、報文正確接收概率及位置報文更新間隔的計算公式,最后分析給出了星基ADS-B接收機監視容量的計算方法,并通過仿真驗證了理論結果的正確性。論文有兩方面的貢獻:①定量給出星基ADS-B接收機位置報文更新間隔的計算方法;②定量給出了星基ADS-B接收機監視容量的計算方法。
1 星基ADS-B系統模型及監視容量分析
1.1 星基ADS-B系統
圖1給出了星基ADS-B系統組成。星基ADS-B系統由機載ADS-B發射機、星基ADS-B接收機、星間通信鏈路、星基ADS-B地面站及ADS-B應用子系統構成。在航空器飛行過程中,航空器通過全球衛星導航系統獲取航空器的相關信息,并周期性產生位置報、速度報、航班標識報及飛機狀態報等,并調制到1 090 MHz頻率以隨機突發方式發射;搭載于低軌道衛星的星基ADS-B接收機解調報文后,通過星間鏈路的傳輸,最后通過星地鏈路傳輸到星基ADS-B地面站;星基ADS-B地面站將收到的報文信息轉換為CAT 021的報文,并通過地面網絡分發到ADS-B應用子系統。
在星基ADS-B系統中,各個機載ADS-B發射機以隨機突發方式發射ADS-B信號,當航空器數量較多時,不同航空器發射信號可能同時到達星基ADS-B接收機,導致接收機無法解調沖突信號,使系統監視性能下降。為方便理論分析,本文只考慮了ADS-B信號間存在的沖突,暫沒有考慮1 090 MHz工作頻率上A/C模式及S模式應答信號對ADS-B信號干擾的影響。
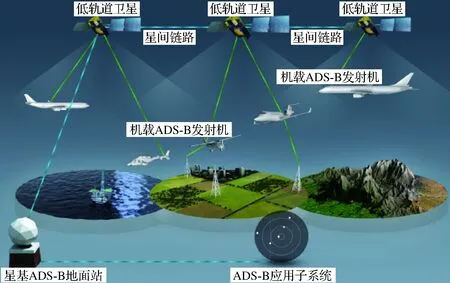
圖1 星基ADS-B系統Fig.1 Satellite-Based ADS-B system
1.2 報文沖突概率
假設機載ADS-B發射機報文發射的速率為v(報文數/s),則機載ADS-B發射機的報文發送周期為T=1/v(單位為s),另外假設星基ADS-B接收機覆蓋空域內航空器數量為N,則星基ADS-B接收機覆蓋空域內全部機載ADS-B發射機產生報文到達星基ADS-B接收機的速率為
(1)
假設單個ADS-B報文的持續時間為τ,則將單個ADS-B報文傳輸期間內,星基ADS-B接收機收到的報文個數定義為星基ADS-B接收機的負載:
G=λτ
(2)
此外假設機載ADS-B發射機產生的報文到達星基ADS-B接收機的時刻是服從泊松分布的隨機變量,則在t時間內有k個報文到達星基ADS-B接收機的概率為[19]
(3)
假設某時刻一個報文到達星基ADS-B接收機,那么在該時刻前τ與后τ的2τ時間內均沒有其他報文到達,則該報文與其他報文無沖突,則星基ADS-B接收機報文無沖突的概率為
Pnc=P(0,2τ)=e-2G
(4)
根據式(4)可計算得到星基ADS-B接收機報文沖突的概率為
Pcollision=1-Pnc=1-e-2G
(5)
式(5)表明:星基ADS-B接收機中報文沖突的概率決定于系統負載因子G,當報文產生速率v及報文持續時間τ給定情況下,系統負載因子G僅決定于星基ADS-B接收機覆蓋區域內航空器的數量,覆蓋范圍內航空器數量越多,則星基ADS-B接收機產生報文沖突的概率越高。
1.3 報文正確接收概率
ADS-B系統原設計用于航空器的空地監視,現將ADS-B應用于星基監視,將產生以下問題。由于航空器與衛星的距離遠大于航空器與地面站的距離,因此星基ADS-B接收機解調器輸入信噪比較低,導致星基ADS-B接收機解調器誤碼率增高,因此在研究星基ADS-B接收機監視容量時還需考慮空天鏈路誤碼率的影響。
假設機載ADS-B發射機與星基ADS-B接收機空天鏈路的誤碼率為Ps,且ADS-B報文包含n個碼元,則在不存在報文沖突情況下,ADS-B報文全部碼元均被正確解調的概率為
Pd=(1-Ps)n≈1-nPs
(6)
進一步將ADS-B報文與其他報文不沖突的事件記為A,ADS-B報文被正確接收的事件記為B,則星基ADS-B接收機正確接收ADS-B報文的概率為
Pr=P(A,B)=P(B/A)P(A)
(7)
式中:P(A)為報文不沖突事件A的概率;P(B/A)為報文無沖突條件下,ADS-B報文被正確接收的概率。分別將式(4)與式(6)代入式(7)可得到ADS-B報文被正確接收的概率為
Pr=Pd·Pnc=(1-Ps)n·e-2G≈
e-2Nvτ·(1-nPs)
(8)
式(8)表明:當報文產生速率v、報文持續時間τ及報文碼元數n給定情況下,報文正確接收概率由星基ADS-B接收機覆蓋區域內航空器數量N及鏈路誤碼率Ps聯合確定。
1.4 位置報文更新間隔
機載ADS-B發射機產生的報文類型有:位置報文、速度報文、場面位置報文、航空器標識報文及狀態報文等,其中位置報文提供了航空器的三維坐標,利用位置報文可實現航空器的監視,位置報文的更新間隔對航空器監視性能有重要的影響,下面給出星基ADS-B接收機位置報文更新間隔的定量計算方法。
(9)
式中:Pr為星基ADS-B接收機報文正確接收的概率,其由式(8)給出。假設位置報文的發送間隔{Ti,i=1,2,…}已給定情況下,位置報文更新間隔的條件均值為
E[ΔT/Ti,i=1,2,…]=PrT1+Pr(1-Pr)·
(10)
考慮到{Ti,i=1,2,…}為統計獨立且取值為[0.8, 1.2]之間均勻分布的隨機變量,且E(Ti)=Tpos,Tpos為飛機位置報文的平均發送周期。進一步對式(10)中的{Ti,i=1,2,…}進行統計平均得到位置報文更新間隔的均值為
Pr·Tpos+Pr(1-Pr)·2Tpos+…+
Pr(1-Pr)i-1·iTpos+…
(11)
式(11)兩邊同乘因子(1-Pr)可得
Pr)2·2Tpos+…+Pr(1-Pr)i-1·
(i-1)Tpos+Pr(1-Pr)i·iTpos+…
(12)
式(11)與式(12)錯位相減后可得
Pr(1-Pr)i-1·Tpos-Pr(1-Pr)i·iTpos
(13)
對式(13)進行整理后表示為
(14)
當i→∞時,位置報文更新間隔的均值化簡為
(15)
最后,將式(8)代入式(15),可得到位置報文更新間隔的均值表示為
(16)
參考ADS-B技術規范[2],ADS-B報文包含碼元個數n=112,報文長度τ=120 μs,機載ADS-B發射機報文產生速率v=3.1報文數/s,飛機位置報文的平均發送周期Tpos=1 s。則式(16)最終化簡為
(17)
式(17)表明:星基ADS-B接收機中,位置報文更新間隔的均值由星基ADS-B接收機覆蓋區域內航空器數量N及鏈路誤碼率Ps聯合決定。
位置報文更新間隔的均值僅描述了星基ADS-B接收機輸出位置報文的平均間隔,該參量不能完全反映位置報文達到的散布程度。下面結合ADS-B地面應用子系統的需求,引入了95%位置報文更新間隔ΔT95%的概念,即位置報文更新間隔ΔT以0.95的概率低于ΔT95%:
P(ΔT≤ΔT95%)=0.95
(18)
(1-Pr)Pr+…+(1-Pr)j-1·
Pr=1-(1-Pr)j
(19)
將式(19)結果代入式(18)后,整理可得
(20)

(21)
式(21)表明:95%位置報文的更新間隔ΔT95%僅由星基ADS-B接收機覆蓋空域內航空器數量N及鏈路誤碼率Ps聯合確定。
1.5 星基ADS-B接收機的監視容量
對式(21)進行變換,可得到航空器數量N與95%位置報文的更新間隔ΔT95%的關系為
(22)
下面基于式(22)引入星基ADS-B接收機監視容量的概念。假設ADS-B地面應用子系統所要求的ΔT95%取值為ΔTreq,則星基ADS-B接收機可提供滿足ADS-B地面應用子系統性能要求的航空器數量稱為星基ADS-B接收機的監視容量。根據以上定義,星基ADS-B接收機的監視容量計算公式為
(23)
參考ADS-B技術規范[2],ADS-B報文的碼元數目n=112,ADS-B報文長度τ=120 μs,機載ADS-B發射機報文產生速率v=3.1報文數/s,飛機位置報文的發送平均周期Tpos=1 s,則星基ADS-B接收機的監視容量的定量計算公式為
C≈-1 344×ln(1-0.051/ΔTreq)-1.5×105Ps
(24)
式(24)表明:星基ADS-B接收機的監視容量由ADS-B應用子系統所要求的位置報文更新間隔ΔTreq及鏈路誤碼率Ps聯合決定。
2 仿真結果
2.1 仿真參數設置
星基ADS-B系統仿真參數如表1所示,在仿真程序中,通過合理設置仿真時間來保證統計數據的準確性。航空器數量為500與1 000架時,仿真時間設置為100 s;航空器數量為1 500與2 000架時,仿真時間為300 s;航空器數量為2 500與3 000架時,仿真時間為500 s;航空器數量為3 500與4 000架時,仿真時間為800 s。
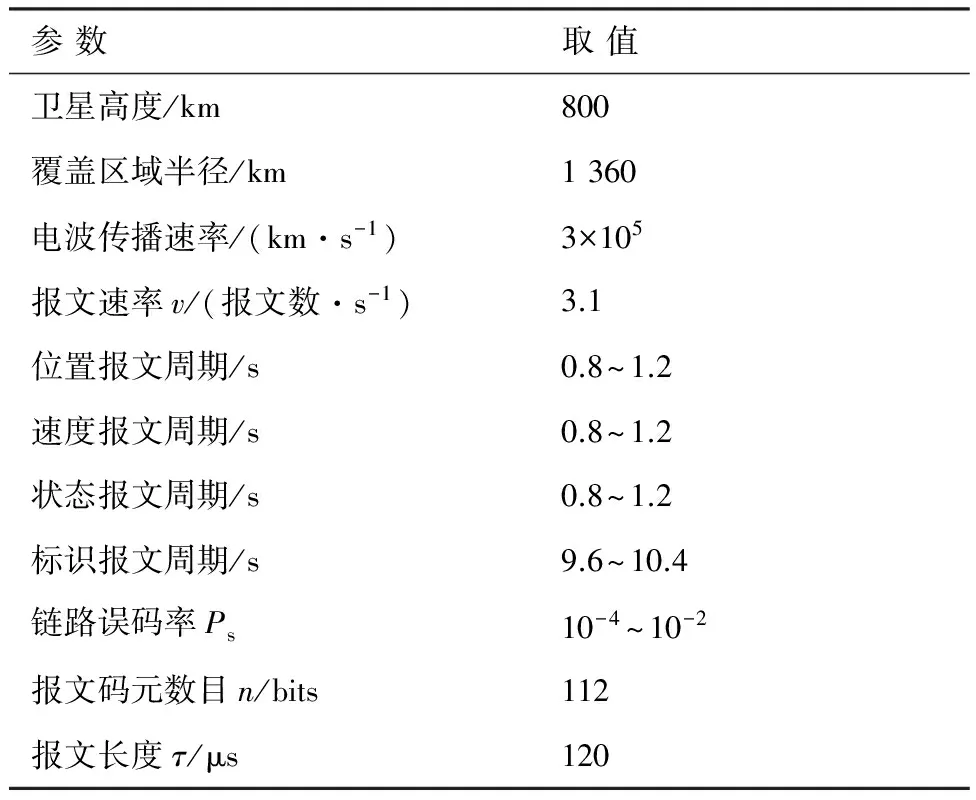
表1 星基ADS-B系統仿真參數[2,20]Table 1 Simulation parameters for satellite-based ADS-B system[2,20]
2.2 報文沖突概率
圖2為星基ADS-B接收機報文沖突概率與航空器數量的關系曲線。曲線比較表明:①理論結果與計算機仿真結果完全一致,驗證理論式(5)的正確性;②隨著航空器數量的增加,星基ADS-B接收機報文沖突的概率顯著增加。

圖2 報文沖突概率與航空器數量的關系Fig.2 Relationship between message collision probability and number of aircraft
2.3 報文正確接收概率
圖3為星基ADS-B接收機報文正確接收概率與航空器數量的關系曲線。曲線比較表明:①仿真結果與理論結果完全一致,驗證理論公式的正確性;②鏈路誤碼率對星基ADS-B報文正確接收概率影響較大,當鏈路誤碼率為10-2時,500架飛機情況下報文正確接收概率僅為0.2,當鏈路誤碼率降低至10-3時,報文正確接收概率則提升至0.6;③航空器數量對報文正確接收概率影響較大,隨著航空器數量的增加,報文正確接收概率迅速下降,當航空器數量超過3 000以后,報文正確接收概率低于0.1。
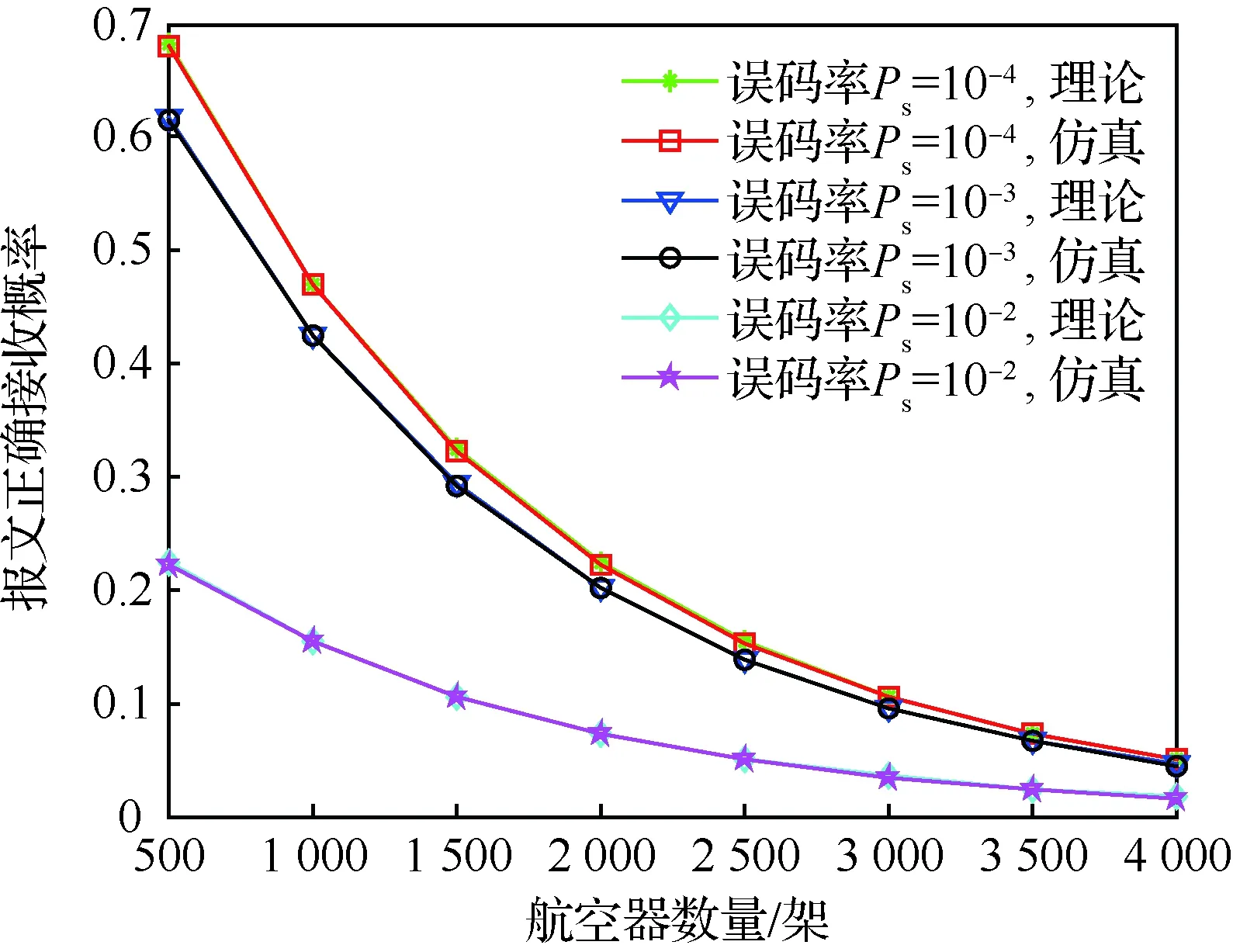
圖3 報文正確接收概率與航空器數量的關系曲線Fig.3 Relationship between correct probability of message reception and number of aircraft
2.4 95%位置報文更新間隔
圖4為95%位置報文更新間隔與航空器數量的關系曲線。曲線比較表明:①仿真結果與理論計算完全一致,驗證理論公式的正確性;②誤碼率對95%位置報文的更新間隔影響較大,鏈路誤碼率為10-3時,4 000架航空器的95%報文更新間隔為60 s,而當鏈路誤碼率惡化至10-2時,4 000架航空器95%位置報文更新間隔將提高到180 s;③航空器數量對95%位置報文更新間隔影響較大,隨著航空器數量的增加,95%位置報文更新間隔增大,例如航空器數量為1 500時,95%位置報文更新間隔為10 s,當航空器數量增加到3 500時,95%位置報文更新間隔顯著提高到40 s。
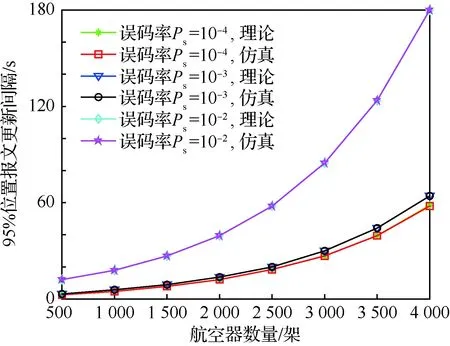
圖4 95%位置報文更新間隔與航空器數量的關系Fig.4 Relationship between of 95% position message update interval and number of aircraft
2.5 監視容量
圖5為星基ADS-B接收機監視容量與要求的位置報文更新間隔的關系曲線。曲線比較表明:①仿真結果與理論計算完全一致,驗證理論公式的正確性;②誤碼率對監視容量影響顯著,當誤碼率為10-2時,要求的位置報文更新間隔為12 s時,監視容量僅為500架,當誤碼率下降至10-4時,監視容量則提高到2 000架;③監視容量與要求的報文更新間隔近似呈現線性關系,要求的位置報文更新間隔每減小1 s,監視容量減少83.3架。
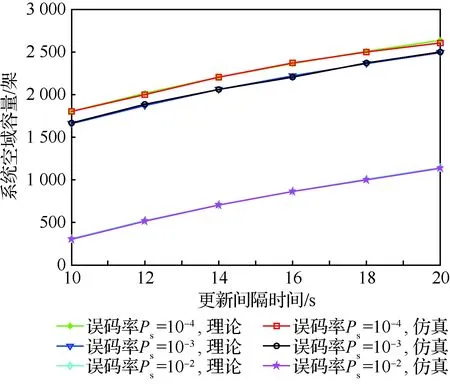
圖5 監視容量與要求的位置報文更新間隔的關系曲線Fig.5 Relationship between surveillance capacity and requested position message update interval
表2進一步計算給出了要求的位置報文更新間隔為ΔTreq=15 s[16]時,不同鏈路誤碼率情況下,星基ADS-B接收機的監視容量。
由表2可觀測到:誤碼率Ps=10-4時,星基ADS-B接收機可為2 282架航空器提供監視服務,鏈路誤碼率Ps=10-3時,監視容量為2 146架,當鏈路誤碼率Ps=10-2時,監視容量僅為784架。

表2 星基ADS-B接收機的監視容量Table 2 Surveillance capacity of satellite-based ADS-B receiver
3 結 論
1)星基ADS-B接收機的監視容量由ADS-B應用子系統所要求的位置報文更新間隔及飛機-衛星鏈路的誤碼率聯合確定。
2)當要求的位置更新間隔給定后,提高飛機-衛星鏈路傳輸的可靠性,可顯著提高星基ADS-B接收機的監視容量。
參 考 文 獻
[1] ICAO. Technical provisions for mode S services and extended squitter: 9871[S]. Montreal: ICAO, 2012.
[2] RTCA DO-260B. Minimum operational performance standards for 1090 MHz extended squitter automatic dependent surveillance-broadcast (ADS-B) and traffic information services-broadcast (TIS-B): ED-102A[S]. Washington, D.C.: Radio Technical Commission for Aeronautics, 2009.
[3] ZHANG J, LIU W, ZHU Y. Study of ADS-B data evaluation[J]. Chinese Journal of Aeronautics, 2011, 24(4): 461-466.
[4] BLOMENHOFER H, PAWLITZKI A, ROSENTHAL P, et al. Space-based automatic dependent surveillance broadcast (ADS-B) payload for in-orbit demonstration [C]∥Advanced Satellite Multimedia Systems Conference. Piscataway, NJ: IEEE Computer Society, 2012: 160-165.
[5] DELOVSKI T, HAUER LC, BERHRENS J. ADS-B high altitude measurements in non-radar airspaces[J]. European Journal of Navigation, 2010, 8(2): 1-28.
[6] GUPTA O P. Global augmentation of ADS-B using Iridium NEXT hosted payloads[C]∥Integrated Communications, Navigation and Surveillance Conference. Piscataway, NJ: IEEE Computer Society, 2011: 1-15.
[7] FRANCIS R, NOEL J M, VINCENT R. Orbital monitoring of automatic dependent surveillance-broadcast (ADS-B) signals for improved air traffic surveillance in remote and oceanic airspace[C]∥Proceedings of the 62nd International Astronautical Congress. Paris: IAF, 2011: 3111-3119.
[8] ITU. Working document towards a preliminary draft new report itu-rm. [ADS-B]-Reception of automatic dependent surveillance broadcast via satellite and compatibility studies with incumbent systems in the frequency band 1088.7-1091.3 MHz: Annex 12 to Working Party 5B[R]. Budapest: International Telecommunication Union, 2015.
[9] Flight Safety Foundation. Benfits analysis of space-based ADS-B[EB/OL]. (2016-06-29)[2017-11-11]. http:∥flight safety.org/wpcontent/uploads/2016/10/ADS-B-report-June-2016-1.pdf.
[10] FRANCIS R, VINCENT R, NOEL JM, et al. The flying laboratory for the observation of ADS-B signals[J/OL]. International Journal of Navigation and Observation, 2011[2017-11-15].http:∥dx.doi.org/10.1155/2011/973656.
[11] DELOVSKI T, WERNER K, RAWLIK T, et al. ADS-B over satellite-the world’s first ADS-B receiver in space [C]∥Small Satellites Systems and Services Symposium. Berlin: DLR, 2014: 1-16.
[12] ALMINDE L, KAAS K, BISGAARD M, et al. GOMX-1 flight experience and air traffic monitoring results[C]∥28th Annual AIAA/USU Conference on Small Satellites. Reston, VA: AIAA, 2014: 1-7.
[13] 陳利虎, 陳小前, 趙勇. 星載ADS-B接收系統及其應用[J]. 衛星應用, 2016(3): 34-40.
CHEN L H, CHEN X Q, ZHAO Y. Satellite-based ADS-B receiving system and application[J]. Satellite Application, 2016(3): 34-40 (in Chinese).
[14] MARK R. Aireon launch begins new era for satellite-based aircraft surveillance[EB/OL]. New York: Flying Magazine, 2017. (2017-01-18)[2017-11-11]. https:∥www.flyingmag.com/aireon-launch-begins-new-era-for-satellite-based-aircraft-surveillance.
[15] DIEGO M. Globalstar's space-based ADS-B[EB/OL]. (2014-09-19)[2017-11-11]. https:∥www.globalstar.com/en/index.php?cid=6300.
[16] GARCIA M A, STAFFORD J, MINNIX J, et al. Aireon space based ADS-B performance model[C]∥Integrated Communication, Navigation, and Surveillance Conference. Piscataway, NJ: IEEE Computer Society, 2015: C2-1-C2-10.
[17] PRYT R V D, VINCENT R. A Simulation of signal collisions over the north atlantic for a spaceborne ADS-B receiver using aloha protocol[J]. Positioning, 2015, 6(3): 23-31.
[18] MARTIN J P, GARCIA C E, FOLONIER M F, et al. Satellite ADS-B message collision simulation[C]∥VIII Conferencia Cientifica de Telecomunicaciones, 2015: 1-6.
[19] ABRAMSON N. The aloha system: Another alternative for computer communications[C]∥Fall Joint Computer Conference. New York: ACM, 1970: 281-285.
[20] RTCA. Minimum operational performance standards for air traffic control radar beacon system/mode select (ATCRBS/Mode S) airborne equipment: DO-181D[S]. Washington, D.C.: Radio Technical Commission for Aeronautics, 2008.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32