分?jǐn)?shù)階二次非線性Sprott混沌系統(tǒng)的滑模同步控制
2018-05-21 09:12:51毛北行程春蕊
數(shù)學(xué)雜志 2018年3期
關(guān)鍵詞:系統(tǒng)
毛北行,程春蕊
(鄭州航空工業(yè)管理學(xué)院理學(xué)院,河南鄭州450015)
1 引言
控制系統(tǒng)的混沌同步問(wèn)題近年來(lái)備受關(guān)注[1],隨著分?jǐn)?shù)階微積分的發(fā)展越來(lái)越多的學(xué)者開(kāi)始研究關(guān)于分?jǐn)?shù)階混沌系統(tǒng)的控制與同步問(wèn)題[2?3],文獻(xiàn)[4]研究了一類不確定分?jǐn)?shù)階混沌系統(tǒng)的自適應(yīng)滑模混沌同步問(wèn)題,能夠使驅(qū)動(dòng)系統(tǒng)與響應(yīng)系統(tǒng)達(dá)到同步;文獻(xiàn)[5]基于主動(dòng)滑模控制方法實(shí)現(xiàn)了分?jǐn)?shù)階混沌系統(tǒng)的同步控制;文獻(xiàn)[6]分別采用線性反饋和主動(dòng)控制法研究了兩個(gè)不同Sprott混沌系統(tǒng)的控制與同步問(wèn)題;文獻(xiàn)[7]研究了一類簡(jiǎn)單二次非線性Sprott混沌系統(tǒng)的分析與控制,得到了平衡點(diǎn)的穩(wěn)定性與Hopf分岔;文獻(xiàn)[8]研究了一類不確定混沌系統(tǒng)的自適應(yīng)滑模終端控制問(wèn)題.本文研究了分?jǐn)?shù)階二次非線性Sprott混沌系統(tǒng)的滑模同步控制及滑模終端控制問(wèn)題,得到了分?jǐn)?shù)階Sprott系統(tǒng)取得滑模混沌同步的充分條件.
定義1[9]Caputo分?jǐn)?shù)階導(dǎo)數(shù)定義為

2 分?jǐn)?shù)階滑模同步控制問(wèn)題
二次非線性Sprott混沌系統(tǒng)[8]

其中x1,x2,x3∈R3為系統(tǒng)的狀態(tài)變量,當(dāng)b=2,c=1時(shí)出現(xiàn)混沌吸引子,設(shè)計(jì)對(duì)應(yīng)的分?jǐn)?shù)階系統(tǒng)為主系統(tǒng)

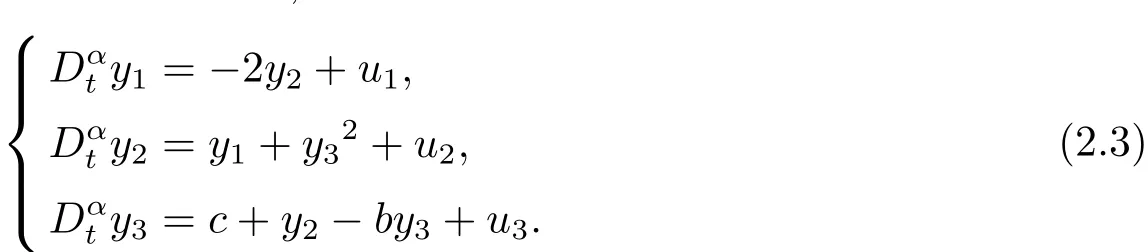
當(dāng)α=0.95,b=2.1,c=1.2時(shí)系統(tǒng)呈現(xiàn)混沌態(tài),對(duì)應(yīng)的從系統(tǒng)設(shè)計(jì)為
定義系統(tǒng)誤差

上述兩式相減得到誤差系統(tǒng)為

定理1選取滑模面控制器

則分?jǐn)?shù)階系統(tǒng)(2.2),(2.3)是滑模混沌同步的.
證當(dāng)狀態(tài)軌跡位于滑模面上時(shí),s(t)=0,(t)=0.
由由得到從而根據(jù)分?jǐn)?shù)階微積分理論得e1(t)→0.同理,由所以得e2(t)→0.又由滑模面上s(t)=0,所以ηsgn(s(t))=0,又由于


由于積分可以得到

所以s(t)是可積的且有界,根據(jù)引理1(Barbalat引理)可知s(t)→0?ei(t)→0.
由以上分析可知,誤差系統(tǒng)將收斂于零.
3 分?jǐn)?shù)階滑模終端控制問(wèn)題
以系統(tǒng)(2.2)為驅(qū)動(dòng)系統(tǒng),如下系統(tǒng)為響應(yīng)系統(tǒng)

假設(shè)1設(shè)不確定項(xiàng)△fi(y)和外部擾動(dòng)di(t)有界,即存在mi,ni>0使得

假設(shè)2mi,ni(i=1,2,3)未知.
定義系統(tǒng)誤差e1=y1?x1,e2=y2?x2,e3=y3?x3,很容易得到誤差方程

引理2[11]假設(shè)存在連續(xù)正定函數(shù)V(t)滿足微分不等式

式中p>0,0<η<1是兩個(gè)正常數(shù),則對(duì)于任意給定的t0,V(t)滿足如下不等式

引理3[12]設(shè)有實(shí)數(shù)a1,a2,···,an,0<q<2,則有下列不等式成立

針對(duì)誤差系統(tǒng)(3.2)設(shè)計(jì)非奇異終端滑模面

定理2誤差系統(tǒng)(3.2)在非奇異滑模面(3.3)上,系統(tǒng)的軌跡在有限時(shí)間ts內(nèi)到達(dá)平衡點(diǎn),其中

證誤差系統(tǒng)滿足滑模面方程于是有

由引理3得

又由引理2易得誤差軌跡會(huì)在有限時(shí)間ts內(nèi)達(dá)到平衡點(diǎn)且

定理3在控制器(3.5)和自適應(yīng)律(3.6)的作用下,誤差系統(tǒng)(3.2)的狀態(tài)軌跡能達(dá)到滑模面.

控制器選取趨近律控制,ki>0為增益系數(shù),表示趨近速度,式中分別為mi,ni的估計(jì)值,設(shè)計(jì)如下自適應(yīng)律



由于si·sgn(si)=|si|,再根據(jù)假設(shè)條件1,2,很容易得到
由

其中 k=min{λ1,λ2,λ3}.不難得到

所以si(t)是可積的且有界,根據(jù)引理1(Barbalat引理)可知s(t)→0?ei(t)→0.
4 數(shù)值仿真
為了說(shuō)明方法的正確性,利用四階龍格-庫(kù)塔法對(duì)系統(tǒng)進(jìn)行仿真研究.
定理1中,系統(tǒng)參數(shù)選取α=0.95,b=2.1,c=1.2,選取滑模面控制器

驅(qū)動(dòng)系統(tǒng)與響應(yīng)系統(tǒng)的初始值分別設(shè)置為

其系統(tǒng)的誤差曲線如圖1所示.圖2,3分別對(duì)不加和加上控制器兩種情況進(jìn)行仿真,誤差系統(tǒng)(2.3)中的不確定項(xiàng)分別為

外部擾動(dòng)取d1(t)=0.2cost,d2(t)=0.6sint,d3(t)=cos3t,驅(qū)動(dòng)系統(tǒng)與響應(yīng)系統(tǒng)的初始值分別設(shè)置為(x1,x2,x3)=(7.3,6.4,9.2),(y1,y2,y3)=(8.5,5.7,3.6)無(wú)控制器和有控制器系統(tǒng)狀態(tài)的兩個(gè)仿真結(jié)果分別如圖2,3所示,如果滑模面參數(shù)取λ1=3,λ2=4,λ3=7,r=0.6,控制器中的參數(shù)選取為(0.8,0.6,0.3),此時(shí)的系統(tǒng)誤差曲線和仿真結(jié)果如圖4所示,圖4看出系統(tǒng)的誤差很快趨近于零.
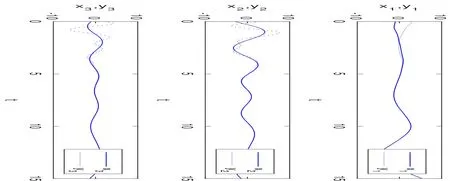
圖1:定理1中的系統(tǒng)誤差曲線
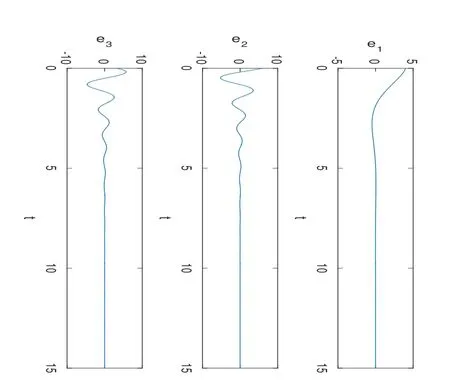
圖2:無(wú)控制的主從系統(tǒng)狀態(tài)

圖3:有控制的主從系統(tǒng)狀態(tài)

圖4:定理3中系統(tǒng)誤差曲線
5 結(jié)論
基于穩(wěn)定性理論研究了分?jǐn)?shù)階二次非線性Sprott系統(tǒng)的滑模混沌同步控制及滑模終端同步控制問(wèn)題,并給出了嚴(yán)格的證明,數(shù)值仿真表明了方法的有效性,文中分?jǐn)?shù)階滑模面的設(shè)計(jì)可以用來(lái)解決一類分?jǐn)?shù)階混沌系統(tǒng)的滑模終端同步控制問(wèn)題.
參考文獻(xiàn)
[1]李德奎,連玉平.單時(shí)滯類Lorenz系統(tǒng)的Hopf分岔分析[J].數(shù)學(xué)雜志,2015,35(3):635–642.
[2]Mohammad P A.Robust finite-time stabilization of fractional-order chaotic susyems based on fractional Lyapunov stability theory[J].J.Comp.Nonl.Dyn.,2012,7:1011–1015.
[3]孫寧,張化光,王智良.不確定分?jǐn)?shù)階混沌系統(tǒng)的滑模投影同步[J].浙江大學(xué)學(xué)報(bào)(工學(xué)版),2010,44(7):1288–1291.
[4]余明哲,張友安.一類不確定分?jǐn)?shù)階混沌系統(tǒng)的滑模自適應(yīng)同步[J].北京航空航天大學(xué)學(xué)報(bào),2014,40(9):1276–1280.
[5]仲啟龍,邵永輝,鄭永愛(ài).分?jǐn)?shù)階混沌系統(tǒng)的主動(dòng)滑模同步[J].動(dòng)力學(xué)與控制學(xué)報(bào),2015,13(1):18–22.
[6]徐登國(guó).兩個(gè)不同Sprott混沌系統(tǒng)的控制與同步研究[J].動(dòng)力學(xué)與控制學(xué)報(bào),2007,5(4):330–333.
[7]Grigoras V,Grigoras C.A novel chaotic systems for random pulse generation[J].Adv.Elec.Comp.Engin.,2014,14(2):109–112.
[8]付景超,孫敬,李鵬松.一類簡(jiǎn)單二次非線性Sprott混沌系統(tǒng)的分析與控制[J].吉林大學(xué)學(xué)報(bào)(理學(xué)版),2015,53(3):395–400.
[9]Podlubny.Fractional differential equation[M].New York:Academic Press,1999.
[10]梅生偉,申鐵龍,劉志康.現(xiàn)代魯棒控制理論與應(yīng)用[M].北京:清華大學(xué)出版社,2003.
[11]Bhat S P,Bernstein D S.Geometric homogeneity with applications to finite-time stability[J].Math.Control Sign.Sys.,2005,17(2):101–127.
[12]Mohammad P A,Sohrab K.Finite-time synchronization of two different chaotic systems with unknown parameters via sliding mode technique[J].Appl.Math.Model.,2011,35(6):3080–3091.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32