一種基于數學形態學的點云地物提取方法
2018-05-30 09:03:32黃禮輝黃子懿
鐵道勘察 2018年2期
黃禮輝 黃子懿
(1.中鐵第四勘察設計院集團有限公司,湖北武漢 430063;2.華中師范大學第一附屬中學,湖北武漢 430223)
1 概述
近年來,隨著激光LiDAR技術的不斷發展,激光掃描儀的掃描精度、掃描速度、角度分辨率等硬件技術指標不斷提高,獲取的激光點云數據量也越來越大,可以達到億級甚至百億級。然而,相對硬件的快速發展,點云數據處理方法與處理軟件的發展嚴重滯后,現有數據處理方法對于點云數據處理的交互性差,人工內業處理工作量大,嚴重影響數據處理效率,這成為制約激光掃描技術工程化應用進一步推廣的瓶頸[1-4]。
針對這一問題,提出一種基于數學形態學的點云地物提取方法。首先將點云數據投影生成各類特征圖像,采用數學形態學方法對圖像進行分割標記,并將標記后的標簽反投影到點云上,從而完成點云數據的分割提取。通過對點云數據中典型地物的自動分割提取,將復雜的掃描場景分割成獨立地物點云集合,大大簡化了點云數據的處理復雜程度,為后續的制圖和建模等應用提供了便利條件。
2 地物提取流程
傳統的直接基于點云數據空間幾何特征和屬性信息的地物提取方法因其需在三維空間進行運算處理,效率低下。而基于數學形態學的地物提取方法先將點云數據投影生成各類特征圖像,應用圖像處理的方法提取地物,再反投影到三維點云數據中。這使得算法更容易實現,計算速度更快。將點云數據投影生成特征圖像后,就可以利用現有的大量圖像處理工具,特別是數學形態學方法。數學形態學的基本運算包括膨脹、腐蝕、開運算和閉運算;基于這些基本運算還可推導和組合成各種數學形態學的實用算法,可廣泛應用于包括圖像分割、特征抽取、邊緣檢測等圖像處理過程中[5,6]。
基于特征圖像分割提取的主要流程:將點云投影生成的特征圖像進行分割及分析提取,并將提取的標簽反投影到點云上,從而完成點云數據的地物提取過程。操作流程如圖1所示。
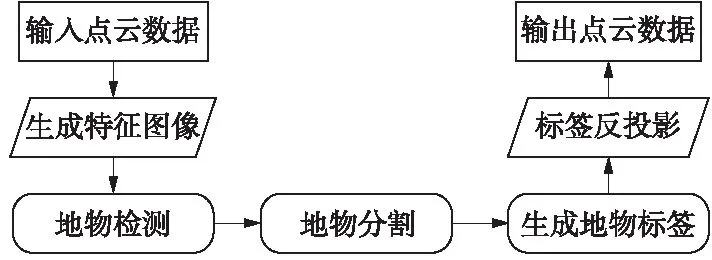
圖1 點云數據地物提取流程
3 特征圖像生成
特征圖像是將點云數據經過投影并以灰度來表達某種特征的特殊數據結構,每個像素位置包含了投影點云的特征信息。其數據結構比較簡單,將三維點云數據投影成圖像后,更利于數據的可視化和快速處理。
點云特征圖像是一種二維的數據結構,圖像的每個像素位置包含了該像素范圍內的點云特征信息。以下主要運用的特征圖像是最大高程特征圖像、最小高程特征圖像、密度特征圖像和高差特征圖像。
首先根據點云數據的外包盒大小確定特征圖像的范圍,假設掃描區域點云數據的外包盒坐標大小分別為:Xmin、Ymin、Zmin、Xmax、Ymax、Zmax,則將整個點云區域投影到XOY平面,可將其分成W×H個格網,格網間隔大小為Cg,則有
(1)
在這個過程中,需要設置特征圖像的空間像素尺寸(即格網尺寸),這個參數非常重要,如果定得太大,會丟失細節信息,導致地物欠分割;如果定得太小,會導致同一地物像素不連續,影響最終分割結果。
最大高程圖像取格網中點云的最大高程作為灰度值。它是進行特征圖像分割的基礎參考數據。而密度特征圖像統計了格網中點云的數量,高差特征圖像則記錄了格網中點云的高差范圍,這兩類特征圖像在分割過程中起到輔助判別作用。三種特征示意如圖2所示。
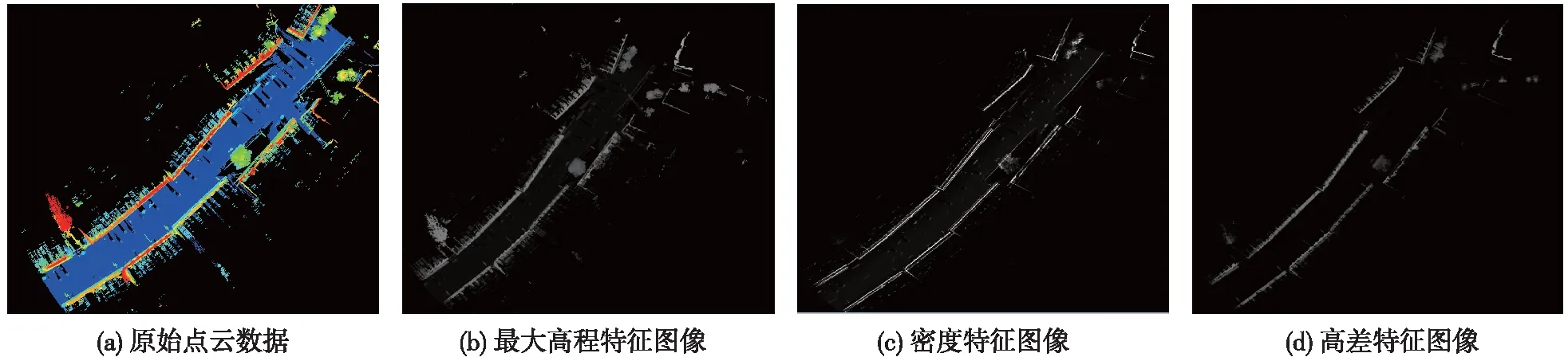
圖2 分類點云特征示意
4 地物提取
激光掃描系統掃描獲取的場景點云數據過于復雜,很難一次性對所有地物進行分割提取。在分析各類地物特征后,提出一種由粗到精、由易到難的層次化提取算法。該方法首先將點云數據劃分為地面數據和非地面數據,然后從非地面數據中依次分割出建筑物、桿狀物和其他地物。
4.1 地面檢測
層次化提取方法第一步是將掃描場景中的地面數據提取出來。地面數據特征與其他地物特征差異較大,數據量在整個掃描場景中所占比例也很大,直接從掃描場景中提取地面點云比較容易實現,且能較大程度地降低后續點云數據分割的復雜程度。地面檢測是基于特征圖像分割方法的關鍵步驟,通過算法提取出地面數據后,地物將失去與地面的聯系,成為獨立的對象集合。通過圖像分割的算法標記分割對象后,即可將分割標記反投影到點云上,從而到達地物點云分割的目的。
檢測采用λ-flat區域標記算法。該算法首先做出以下定義:假設數字灰度圖像f中相鄰的兩個像素p,q之差|fp-fq|小于給定閾值,則認為像素p,q屬于同一平坦區域,如式(2)
?(p,q)neighbors:|fp-fq|≤λ
(2)
屬于地面的相鄰像素高差通常較小,設置閾值λ為30 cm,即可將最大高程圖像f中的地面像素標記為同一區域。一般情況下,取出高程圖像中面積最大的標記區域即為地面區域。通過λ-flat區域標記算法分割出地面數據后,剩下的非地面數據就可作為地物分割的候選對象(如圖3所示)。
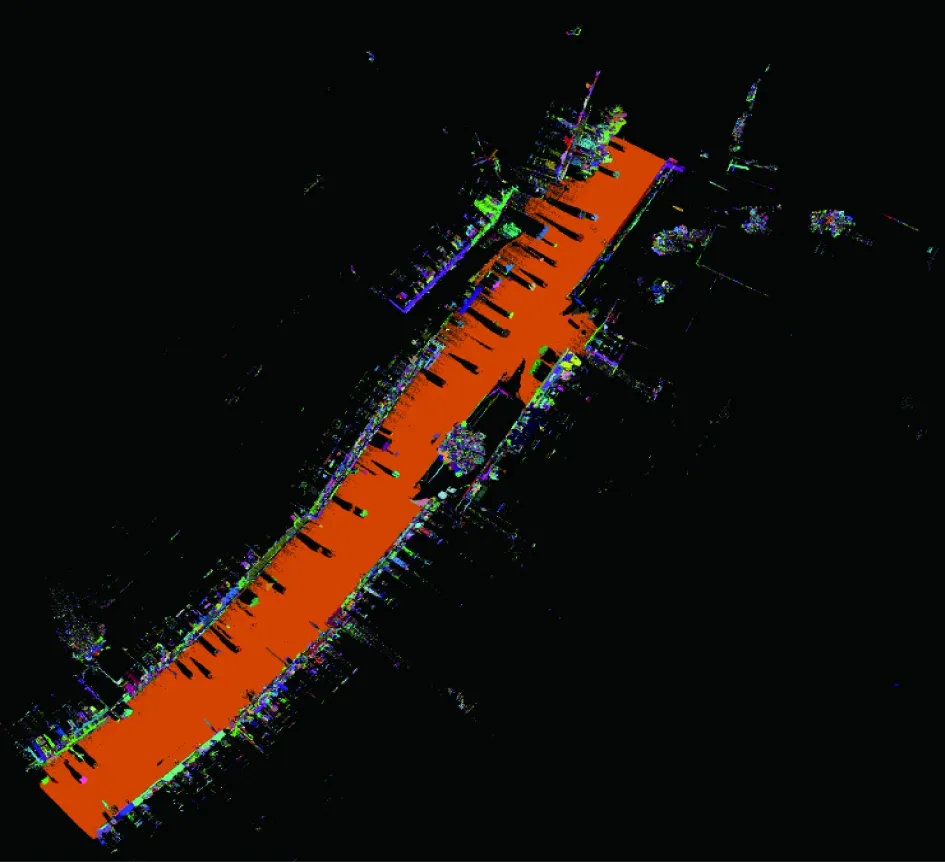
圖3 λ-flat區域標記算法地面檢測
4.2 地物分割
地物分割是將點云數據分割成若干個互不相交的子集,即將點云數據中不同的地物對象劃分成獨立的地物點云集合,從而簡化點云數據后續處理的復雜度。在使用λ-flat區域標記算法完成地面數據和非地面數據分割后,同樣可以使用基于圖像處理的方法對地物數據進行分割。地物在失去與地面的關聯后,在空間上呈獨立分布,通過連通區域計算即可完成獨立地物的分割過程[7,8],計算步驟如下。
(1)獲取經過λ-flat區域標記后的最大連通區域gm(f)。
(3)
(4)對待分割地物圖像gs(f)進行連通分析,每個連通區域即為獨立的地物對象,將標記反投影到點云數據上即可獲得最終的點云分割結果。
圖4(a)為經過步驟(2)空洞填補后反投影獲取的待分割點云數據,圖4(b)為最終的分割結果,不同的顏色表示不同的分割對象。
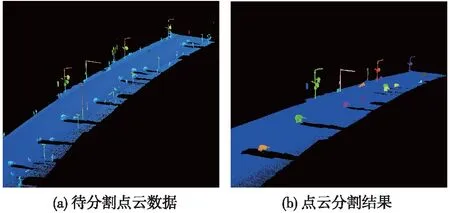
圖4 點云地物分割
4.3 建筑物提取
完成地面檢測和地物分割后即可對典型地物進行提取。首先提取建筑物點云,其點云數據投影生成的特征圖像具有較大密度和高差,同時投影面積也較大[9-12]。提取步驟如下。
(1)將經過處理的點云數據分別投影成最大高程、高差和密度特征圖像。
(2)設定高差圖像和密度圖像的提取閾值,高差特性圖像閾值設定為大于3 m,密度特征圖像閾值設定為大于50點/像素。將同時滿足這兩個條件的像素點作為建筑備選點。
(3)將所有建筑備選像素點生成二值圖像,進行連通區域分析。刪除連通面積較小的區域,剩余的像素點即為分割出的建筑區域。
(4)將建筑分割標記反投影到點云數據,即可達到建筑提取的目的。
4.4 桿狀物提取
完成建筑物點云的提取后,可繼續提取路燈、廣告牌等桿狀物。桿狀物投影到特征圖像上后也具備較大的高差和投影密度,但是投影面積很小。為了進一步區分桿狀物中路燈、廣告牌等細類。提出了“桿狀度”的概念,用于表達地物桿狀部分在地物整體中所占的比率。例如,路燈、廣告牌的桿狀度較高,樹木桿狀度適中,建筑、欄桿等的桿狀度為零[13,14]。
桿狀物提取同樣也需要將點云數據投影為特征圖像(利用桿狀部分在特征圖像上和其鄰域點特征的差異進行提取)。這一過程會丟失地物的非桿狀部分,需要再通過區域增長的方法實現非桿狀部分的提取。提取步驟如下。
(1)將點云數據進行投影,分別得到最大高程圖像、密度圖像和高差特征圖像。這里的密度圖像是指將每個像素內的高差分成10等分,只要某一個等分間隔內包含點,該像素值就累加1。
(2)對特征圖像上的高差特征和密度設定閾值,高差閾值為大于2 m,密度閾值大于8點/像素。然后提取滿足特征要求的像素值,獲取標記圖像。
(3)對標記圖像進行膨脹處理并進行連通區域分析,刪除連通面積較大的區域,保留連通面積較小的區域,這些區域即為候選桿狀區域。
(4)對候選桿狀區域中的小塊連通區域使用區域增長算法,尋找桿狀物的非桿狀部分,并進行標記。
(5)將特征圖像上的桿狀物進行標記并反投影到點云數據上,完成桿狀地物的提取。
桿狀物提取結果如圖5所示。

圖5 桿狀地物提取結果
5 試驗驗證
為了驗證基于數學形態學點云地物提取方法的有效性和適用性,選擇某街區車載激光掃描獲取的點云數據進行試驗分析。研究區地物種類包括建筑、樹木、路燈等典型地物,人工統計共有桿狀地物47個,建筑物10個。通過本文算法分割提取出桿狀地物44個,建筑物10個,綜合提取精度為94.7%。其中,建筑物提取精度為100%,桿狀物提取精度為93.6%。部分桿狀物未被正確提取的主要原因是桿狀物和其他地物空間距離太近,在地物分割的過程中沒有被正確分割。
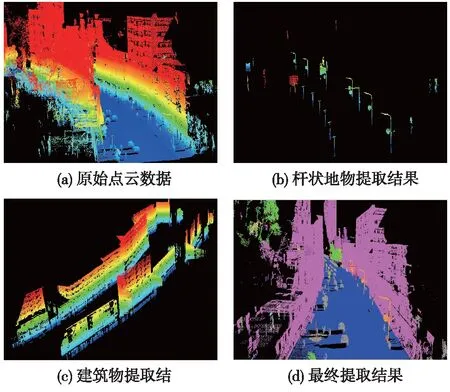
圖6 地物提取試驗結果
試驗數據的提取結果如圖6所示,圖6(a)為原始掃描點云數據,圖6(b)為桿狀物提取結果,圖6(c)為建筑物提取結果,圖6(d)為最終的提取結果。從圖6可以看出,采用本文方法不僅可有效地區分地面點云數據和非地面點云數據,對于建筑、桿狀地物等典型特征地物也有較高的提取精度,其成果可為后續的矢量提取及三維建模提供有效的數據支持。
6 結論
點云數據的快速分割提取能夠極大地提高點云數據的處理效率和自動化程度。傳統的直接基于點云數據的地物提取算法因其數據量大而效率較低。本文提出的基于數學形態學的地物提取方法,通過投影轉換為圖像的處理方式,不僅能夠高效地從復雜場景點云中提取興趣目標,并且具備較高的提取精度,為拓寬激光點云數據的處理方法提供了一個新的思路,也為后續的自動化成圖和建模操作奠定了技術基礎。在今后的研究中,可進一步研究不同地物對象在特征圖像中的表現特征,擴大地物自動化提取的類別,使本文算法的使用范圍更加廣泛。
[1] 歐新良,匡小蘭,倪問尹.三維散亂點云分割技術綜述[J].湖南工業大學學報,2010,24(5):45-49
[2] 楊耘,隋立春.面向對象的LiDAR數據多特征融合分類[J].測繪通報,2010(8):11-14
[3] 唐云龍.基于車載激光點云數據的典型地物分類與提取[D].北京:北京工業大學,2015
[4] 肖永飛.ALS70激光點云檢校流程[J].鐵道勘察,2011,37(6):37-40
[5] Golovinskiy A, Kim V G, Funkhouser T. Shape-based recognition of 3D point clouds in urban environments[C]∥IEEE, International Conference on Computer Vision. IEEE, 2010:2154-2161
[6] Pu S,Vosselman G.Automatic extraction of building features from terrestrial laser scanning[J]. International Archives of the Photogrammetry,Remote sensing and Saptial Information, 2006,5(36)
[7] 張齊勇.基于區域增長的LiDAR點云數據DEM提取[J].鐵道勘察,2015(2):14-17
[8] 吳杭彬,劉春.基于數學形態學的LIDAR數據分割和邊緣提取[J].遙感信息,2008(4):27-32
[9] 郎悟靈.基于改進的形態學濾波與區域增長法的建筑物點云數據提取方法研究[D].成都:西南交通大學,2012
[10] 程效軍,程小龍,胡敏捷,等.融合航空影像和LIDAR點云的建筑物探測及輪廓提取[J].中國激光,2016(5):247-255
[11] 徐文學.基于標記點過程的機載激光掃描點云建筑物提取[D].武漢:武漢大學,2013
[12] 王果.不同平臺激光點云數據面狀信息自動提取研究[D].北京:中國礦業大學(北京),2014
[14] Serna A, Marcotegui B. Detection, segmentation and classification of 3D urban objects using mathematical morphology and supervised learning[J]. Isprs Journal of Photogrammetry & Remote Sensing, 2014,93(7):243-255
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
