大型結構物模塊對接新型裝置及多缸同步控制
2018-06-02 06:31:27成思銘
中國機械工程 2018年10期
關鍵詞:系統
成思銘 章 青
天津大學機械工程學院,天津,300350
0 引言
目前并行工程、敏捷制造技術在大型結構物模塊化建造過程中逐步得到應用,要求對大型結構物模塊進行同時建造,最后整體組裝,但大型結構物模塊分段建造空間對接精度要求較高,且每個分段長達數十米,質量達數千噸,因此,對三維重載對接調整裝置的研究具有迫切性;而在一次對接中需要多臺裝置聯合使用,因此,對多缸同步的精度及穩定性都有嚴格的要求[1]。
國內外關于大型結構物三維對接技術的研究主要集中在造船領域,分段總組造船法已經成為造船的主要方法,為了解決在分段位置和姿態調整過程中效率低和精度低的問題,研制了專門用于船舶制造過程中對接的設備,目前分段自動合攏設備主要有兩種形式:整體式合攏設備和分體式合攏設備[2]。
文獻[3-4]采用主從控制方式對多缸同步控制,其主要思想是選擇一個液壓缸的輸出作為基準位移,其他液壓缸將該位移作為閉環控制的輸入信號,從而保證多缸同步控制,但是該方法在液壓缸突然加減速以及有外部沖擊時會產生較大的同步誤差。文獻[5]在主從控制的基礎上加入模糊自適應PID控制對位移進行跟蹤,并對控制參數進行在線修改,使控制器的輸出實時地跟蹤被控對象參數的變化;文獻[6]在主從控制的基礎上采用IMC-PID控制,將IMC(內模控制)引入PID控制器中,不僅可以保證參數設計的復雜性和隨機性,同時也可以獲得較好的魯棒性。以上方法主要利用現代控制算法來提高同步性能,在一定程度上能優化由主從控制產生的位移滯后問題,并能保證多缸同步的穩定性。
針對巨大運動慣量、復雜的非線性負載的同步系統,文獻[7-8]將運動過程分為驅動運動過程與同步運動過程,同時考慮到驅動過程與同步過程存在一定的耦合現象,對驅動過程提出了在線智能控制,通過在線檢測驅動過程輸出速度,設計了智能控制算法,抑制同步過程對驅動運動的干擾作用,從而達到對驅動過程的高精度控制。本文針對大型結構物三維重載對接多缸同步控制,提出了一種多缸耦合的控制方法。
1 三維重載對接系統簡介
1.1 三維重載對接模型
在對接過程中,為了實現3個方向的位移,該裝置在動力輸出中使用了兩個水平方向的副液壓缸和一個垂直方向的主頂升液壓缸;并且其中一個副液壓缸與主頂升液壓缸之間采用剛性連接,使該副液壓缸只能在水平面內平動,而將另一方向的副液壓缸與主頂升液壓缸之間采用軸承連接,形成鉸鏈結構,使該副液壓缸可在平面內繞主頂升液壓缸轉動;為了適應場地需求,為裝置分配了3個行走機構,使裝置在使用過程中更加具有靈活性。其整體結構見圖1。
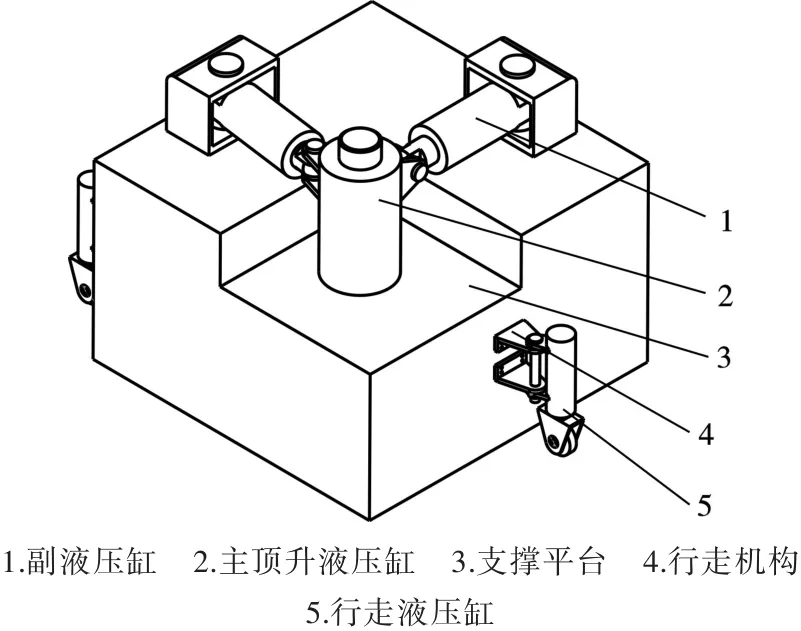
圖1 三維重載對接調整裝置整體結構示意圖Fig.1 Overall structure of the adjusting device for three-dimensional heavy load docking
在實際工程中,由于單臺裝置的額定承載能力為100 t,故根據對接結構的質量確定對接裝置的數量。其主頂升液壓缸活塞桿與負載接觸點分布圖見圖2,通過控制主頂升液壓缸的同步運動可以實現對接結構物沿Z軸的運動以及繞X軸的俯仰和繞Y軸的翻滾運動;同理,通過控制副液壓缸的同步運動可以實現對接結構物沿X軸、Y軸的運動以及繞Z軸的偏航運動。
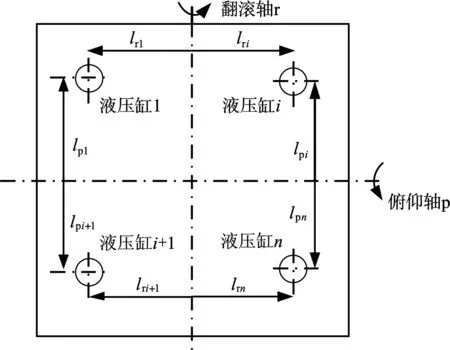
圖2 主頂升液壓缸活塞桿與負載接觸點分布圖Fig.2 Contact point distribution of piston rod and load of main hydraulic cylinder
1.2 三維重載對接裝置液壓系統
三維重載調整裝置液壓系統原理見圖3。該系統采用恒壓油源,電機啟動后帶動液壓泵3轉動,輸出的高壓油經過過濾網2、單向閥5后分為兩路,左路是行走機構的液壓系統,右路為定位機構的液壓系統,兩部分在液壓控制上是相互獨立、互不影響的,各自的電磁閥專門負責進行控制,使其能按順序工作。
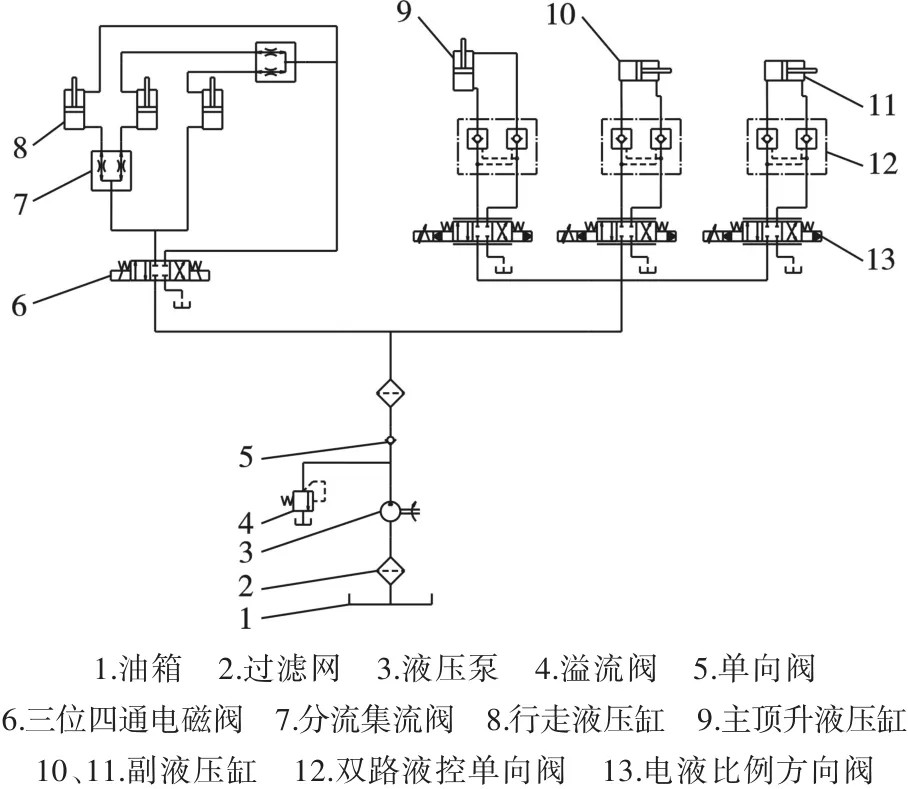
圖3 三維重載調整裝置液壓系統原理圖Fig.3 Hydraulic principle diagram of three-dimensional heavy load docking
對于行走機構液壓子系統,由于需要控制的精度不高,故采用由三位四通電磁閥6、分流集流閥7和行走液壓缸8組成的開環回路進行粗略的同步控制,保證裝置移動中的平穩性。系統工作過程中,3個電液比例方向閥13初始位置應處于中位,通過控制電磁閥6的左右通斷來實現對裝置位置的調整。
對于定位機構液壓子系統,由于需要達到一定的對接精度,故采用由電液比例方向閥13、工作液壓缸9、10、11和位移傳感器組合成的閉環控制回路加以相應的控制算法,來實現液壓桿輸出位移的精確控制,并加入兩個液控單向閥形成液壓鎖12對系統保壓保障安全性。
2 多缸耦合同步控制
2.1 耦合器設計
耦合控制的思想最先從電機控制發展而來,主要是基于最小相關軸數控制[9]。相鄰耦合控制理論結合了滑膜控制與Lyapunov魯棒控制,在多電機同步控制以及多機器人編隊控制中具有良好的同步性和跟蹤性能[10-11]。
將上述思想移植到液壓系統同步控制中,即每個液壓缸控制器的輸入不僅要考慮自身的跟隨誤差,還應考慮與該液壓缸相鄰的兩液壓缸之間的誤差。如圖2中的n個液壓缸,設某時刻第i個液壓缸的輸出位移為 yi,其相鄰的液壓缸i-1和i+1的輸出位移為 yi-1、yi+1,給定的輸入信號為r*,自身跟隨誤差ei=r*-yi,第i個液壓缸和第i-1個液壓缸之間的誤差ei,i-1=yi-yi-1,第i個液壓缸和第i+1個液壓缸之間的誤差ei,i+1=yiyi+1,則可得多缸同步控制框圖(圖4),通過耦合器將相鄰兩液壓缸的誤差處理后同自身的跟隨誤差相加輸出到控制器,對電液比例方向閥進行控制形成閉環反饋。
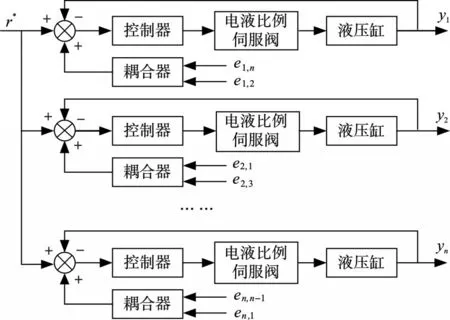
圖4 多缸同步控制框圖Fig.4 Multi-cylinder synchronization control block diagram
耦合器的內部框圖見圖5,其主要思想是:將相鄰兩液壓缸的誤差經過系數修正后相加得到耦合器的輸出,并輸送到控制器中。由于液壓系統具有非線性的特性,故不能精確地確定耦合系數值,因此本文采用模糊PID控制方法來獲取耦合系數值。
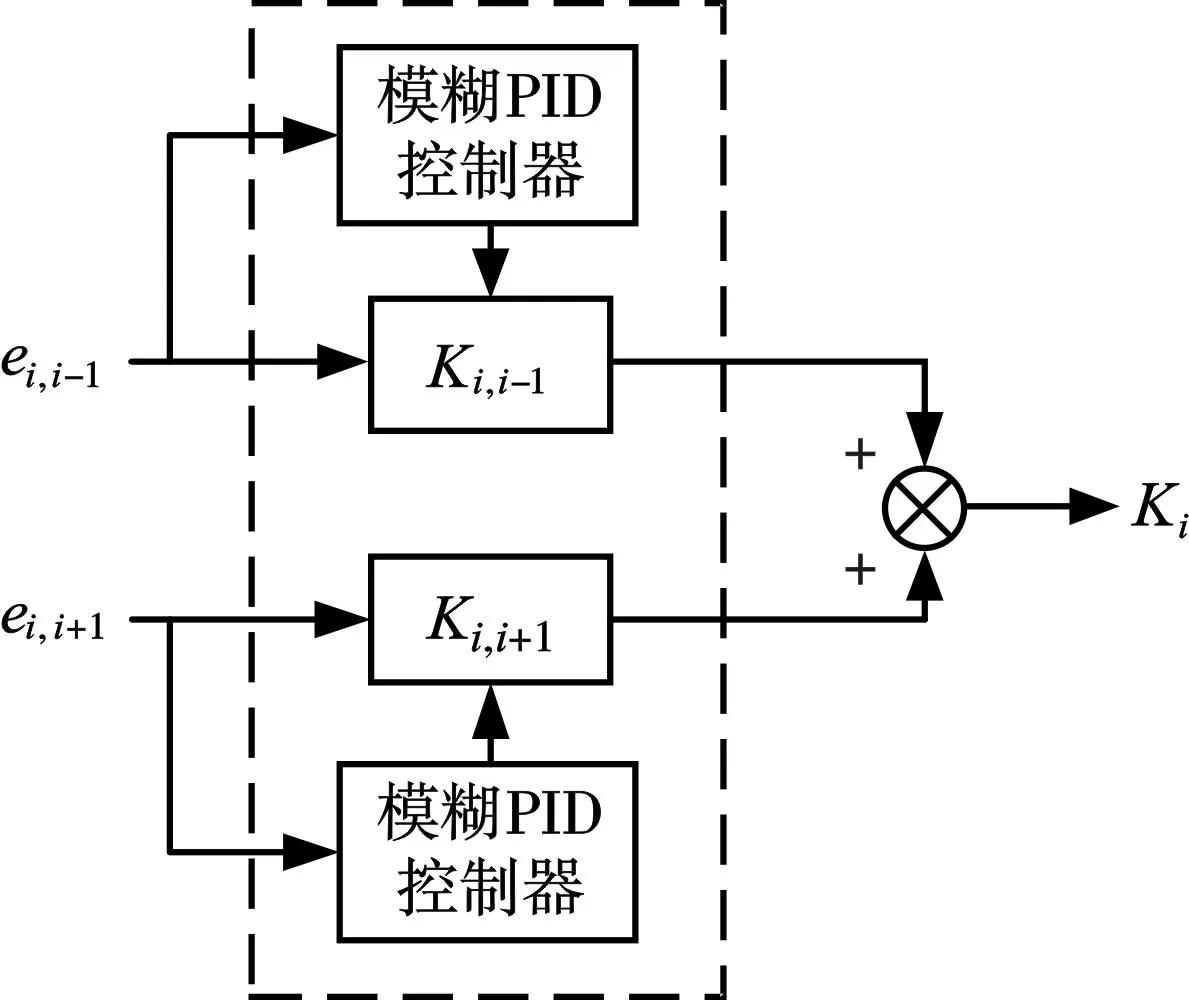
圖5 耦合器內部框圖Fig.5 Coupler internal block diagram
具體做法如下:將第i個液壓缸與其相鄰的兩液壓缸i-1和i+1的誤差e和誤差變化率c分別輸入自己的模糊控制器,模糊控制器輸出變量?KP、?KI、?KD分別為PID控制參數 KP、KI、KD的增量,可以滿足不同時刻的誤差e和誤差變化率c對PID參數自整定的要求。然后對誤差e進行比例、積分、微分相加后得到相對應的耦合系數值。最終可得第i個液壓缸與其相鄰的兩液壓缸之間總的耦合誤差Ki,控制框圖見圖6。
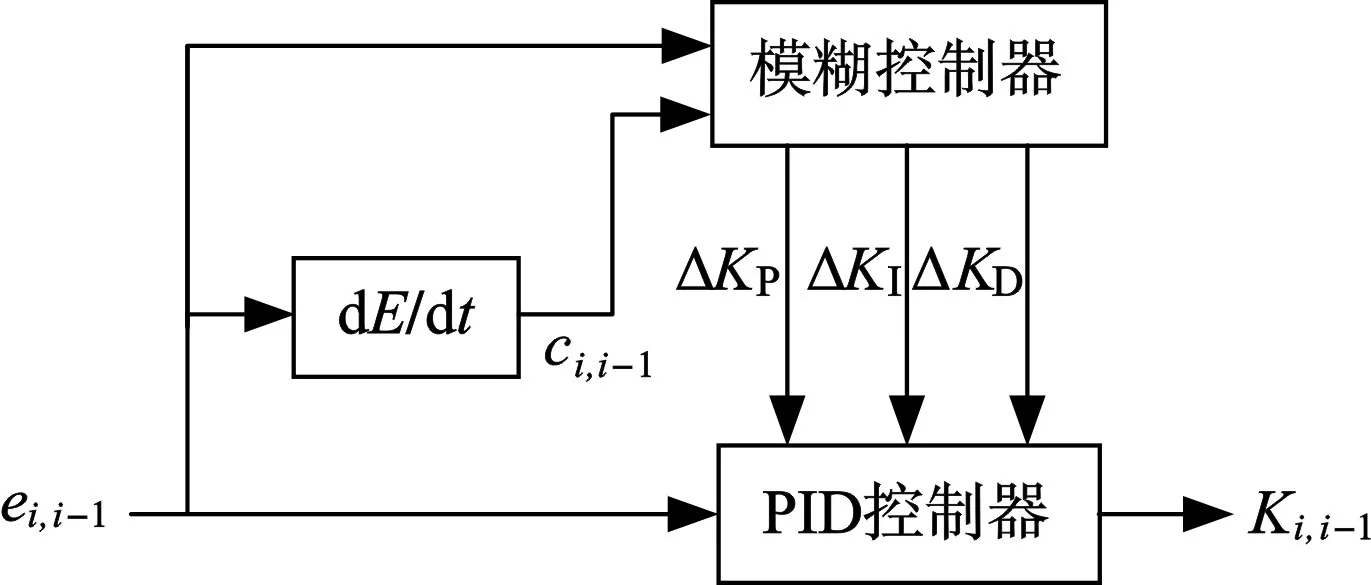
圖6 模糊PID控制框圖Fig.6 Fuzzy PID control block diagram
在調節過程的起始階段選用較小的KP,以減小各種物理量初始變化的沖擊,同時為了防止系統飽和非線性影響而引起的系統超調量增加,KI應取較小值,KD應取較大值。在調節過程的中期,適當增大KP值,以提高系統快速性和動態性能,同時KI應適中,KD適當小些。在調節過程的后期,盡量減小KP,提高控制精度,同時增大KI以減小系統靜差,減小KD以補償在調節過程初期由于KD較大所造成的調節過程時間延長。即

綜上所述,第i個液壓缸的控制器的輸入值

式中,Ki,i-1分別為第i個和第i-1個液壓缸之間誤差的耦合系數;Ki,i+1為第i個和第i+1個液壓缸之間誤差的耦合系數。
多缸耦合的控制目標就是使ei、ei,i-1、ei,i+1的值盡可能趨近于零[12]。
2.2 耦合器耦合系數模糊控制器設計
本裝置液壓缸的規定行程為0.4 m,根據要求,系統同步誤差不應超過2%,并且為了方便控制器的設計,將誤差e控制在-6~6 mm之間,同時誤差變化率c控制在-6~6 mm/s之內。在設計模糊PID控制器時,通過量化因子1 000將誤差和誤差變化率映射到論域[-6,6]之間,并規定其兩者的模糊集為{NB,NM,NS,ZO,PS,PM,PB};規定比例系數KP、積分系數KI、微分系數KD的模糊集為{NB,NM,NS,ZO,PS,PM,PB}。最終設計的3個參數的模糊控制規則見表1~表3。
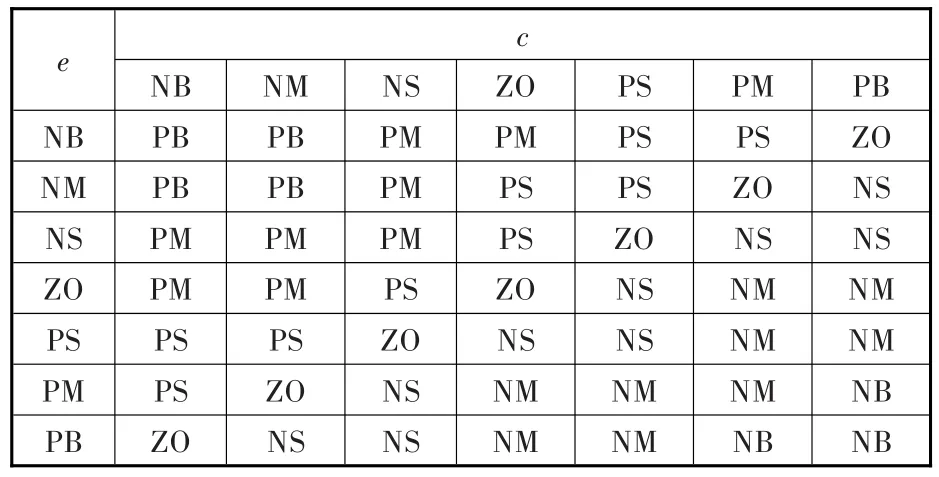
表1 KP模糊規則表Tab.1 Fuzzy rules table ofKP
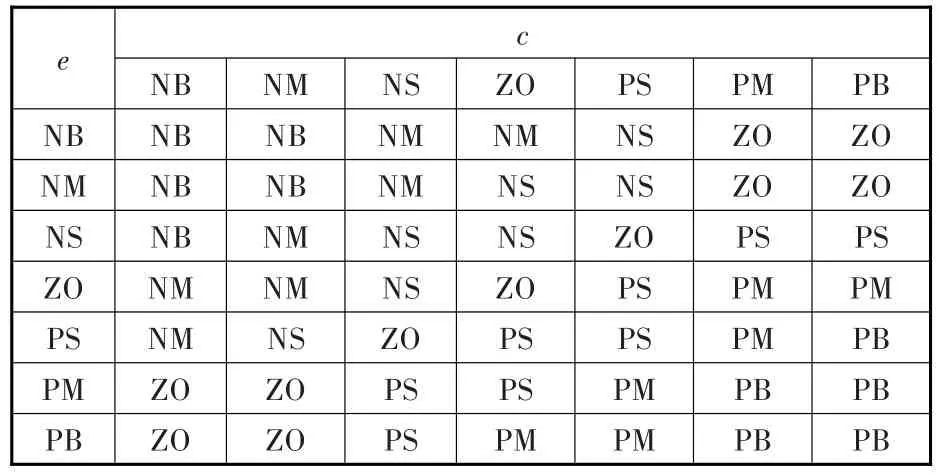
表2 KI模糊規則表Tab.2 Fuzzy rules table ofKI

表3 KD模糊規則表Tab.3 Fuzzy rules table ofKD
3 同步模型與仿真
由于液壓系統實際工作中存在很多不確定因素(如管線沿層壓力損失、閥的非線性等),若建立整個系統的數學模型,會給仿真帶來不精確性,故本文采用AMESim和MATLAB聯合仿真對系統的同步性進行研究[13-14]。
3.1 仿真模型的建立
實際工況對接結構物的質量為1 000 t,因此,總共采用12臺三維重載對接設備(n=12)進行對接。在實際仿真中,由于液壓缸的仿真數量并不影響最后的結果,故為了縮短仿真時間,選取4臺設備進行仿真,其模型見圖7,并設置液壓系統主要參數(表4),控制器參數主要包括:放大系數K=1 000,PID控制器初始參數 KP=20,KI=5,KD=3.5。
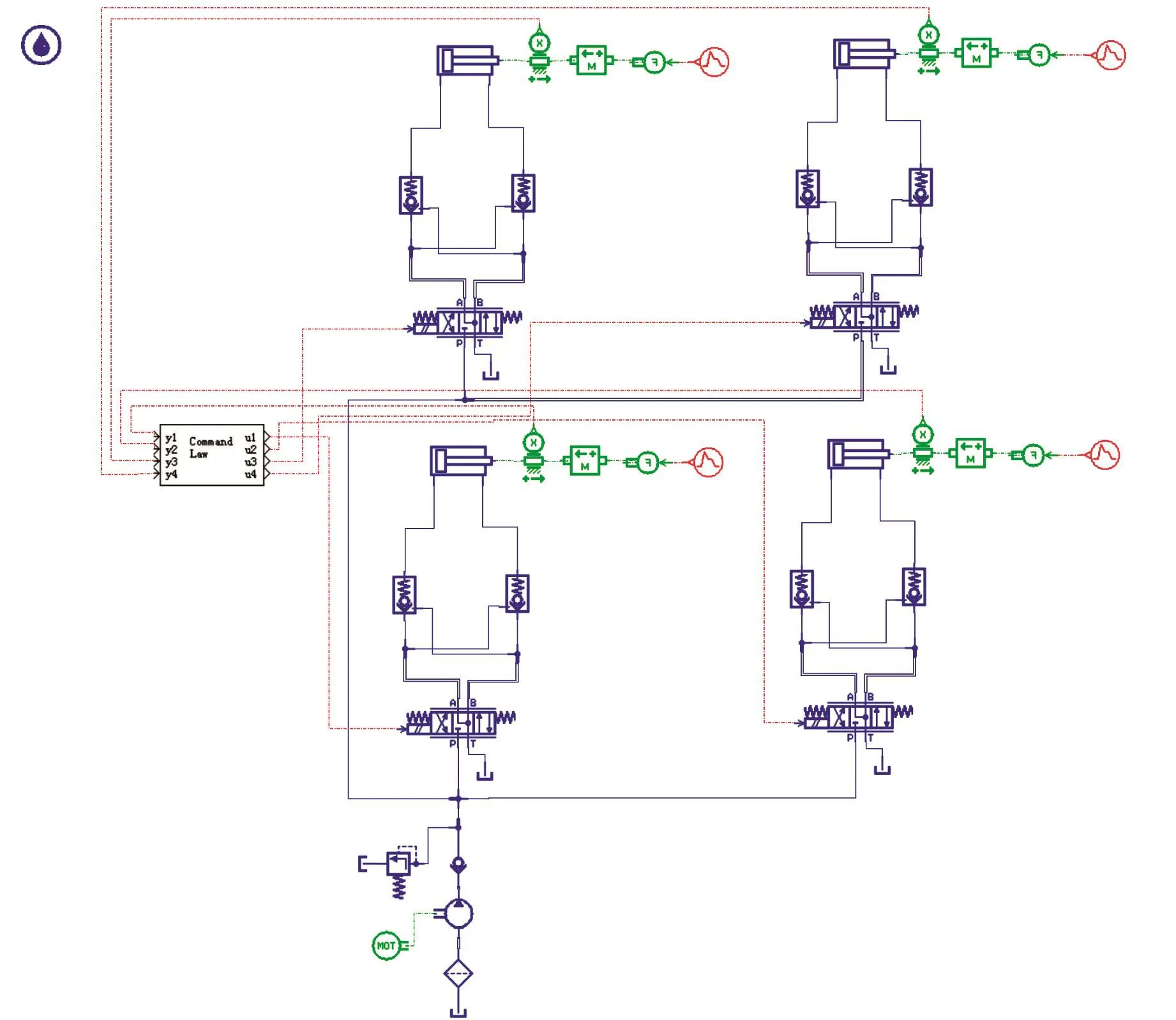
圖7 AMESim仿真模型Fig.7 AMESim simulation model
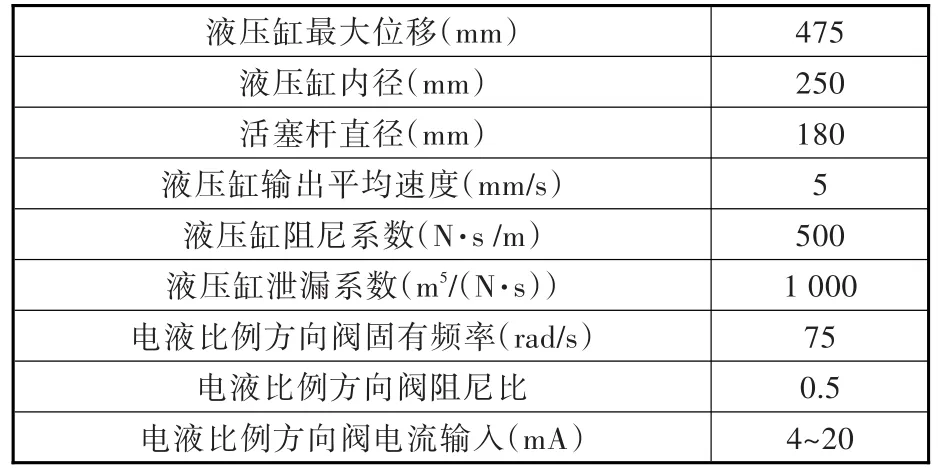
表4 仿真模型主要參數Tab.4 The main parameters of the simulation model
通過接口將AMESim得到的液壓缸位移值輸入MATLAB中,利用其Simulink模塊進行控制仿真,計算得到控制信號,返回AMESim中對電液比例方向閥進行控制。其中,MATLAB仿真模型見圖8,液壓缸1的耦合器仿真模型見圖9,耦合系數的模糊PID框圖見圖10。
3.2 仿真結果分析
設定仿真時間為80 s,仿真步長為0.01 s,并將仿真結果同主從控制的結果進行對比,兩種控制方法的仿真結果分別見圖11、圖12。在圖12中,由于主從控制中其余3個液壓缸都是跟隨液壓缸1進行運動,故在考慮誤差分析時選取液壓缸1和液壓缸2之間的誤差值以及液壓缸2和液壓缸3之間的誤差值,其余液壓缸之間的誤差值與這兩種情況相似。
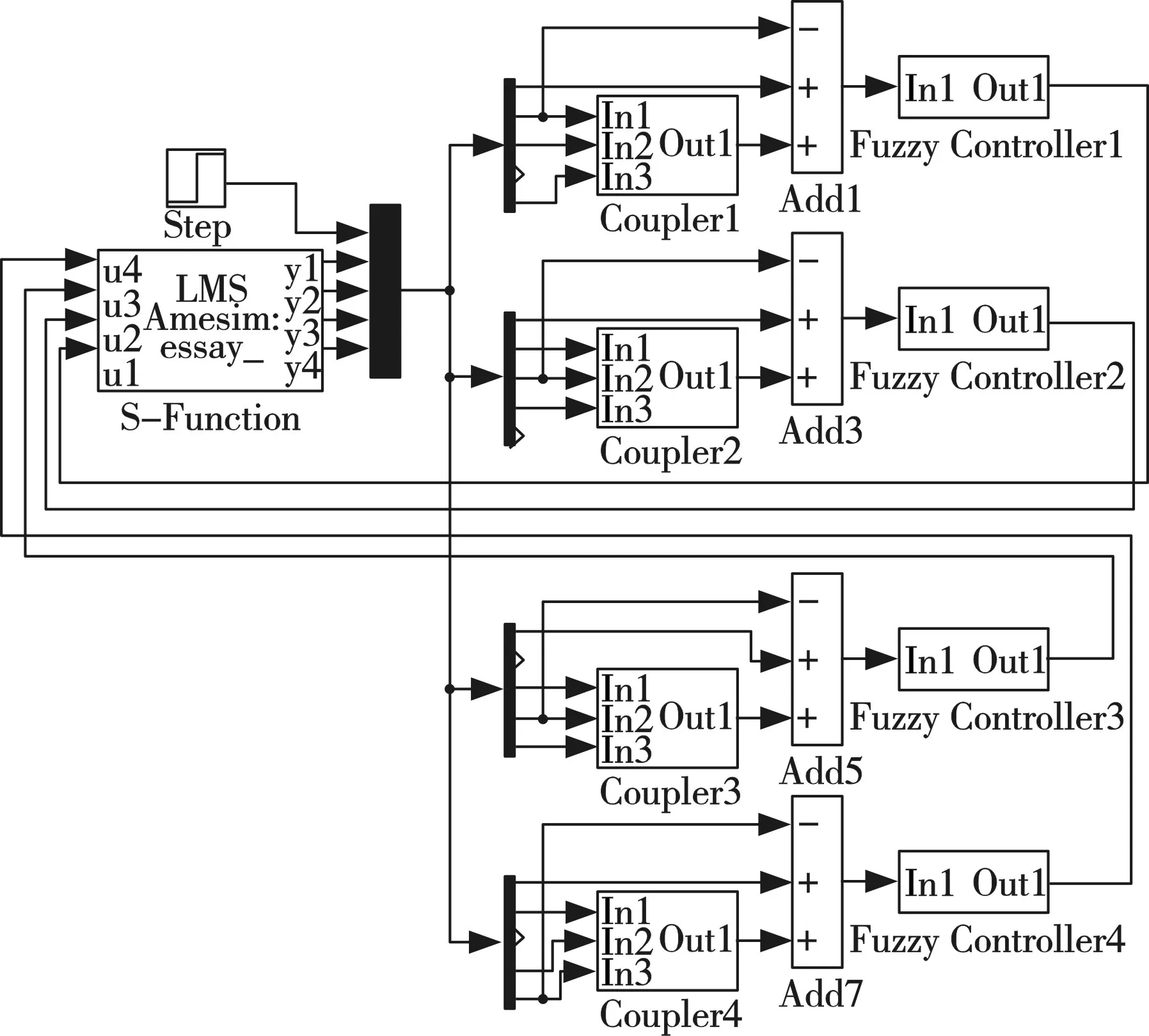
圖8 MATLAB仿真模型Fig.8 MATLAB simulation model
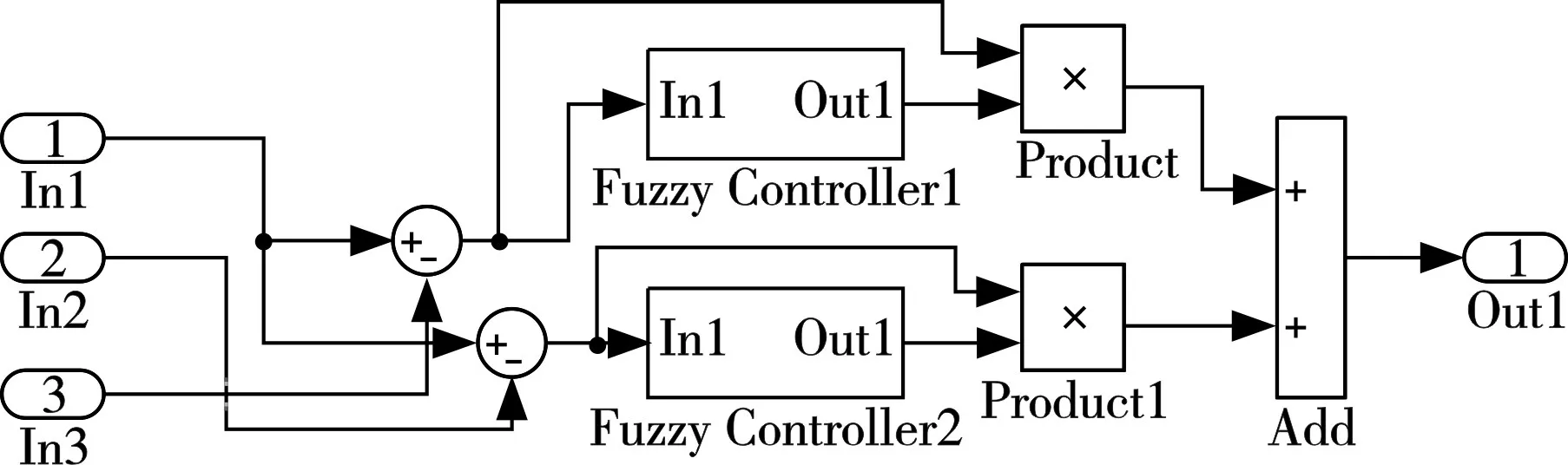
圖9 液壓缸1耦合器仿真模型Fig.9 Simulation model of coupler for hydraulic cylinder 1
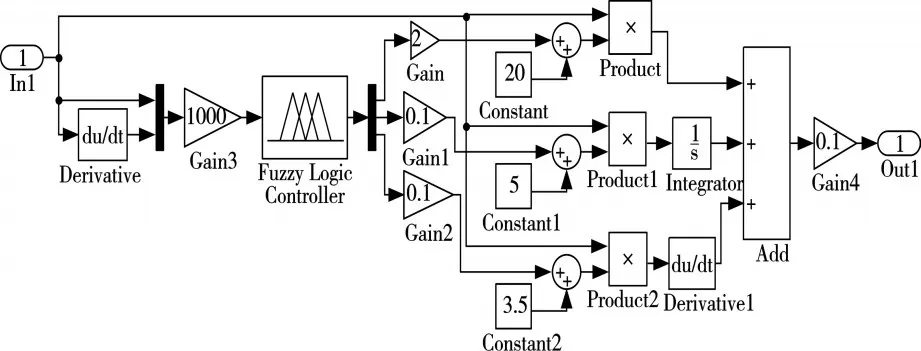
圖10 耦合系數的模糊PID框圖Fig.10 Fuzzy PID block diagram of coupling coefficient
通過對比兩種方法的仿真圖可以看出,采用主從控制方式有著明顯的位移跟隨滯后現象,如圖12a所示,液壓缸1和液壓缸2之間的最大誤差不超過3 mm,且需要經過較長的時間才能消除誤差,說明在系統突然加速或減速時會產生較大的振蕩誤差;而采用多缸耦合的控制方式能夠明顯消除滯后誤差,并且從圖11中可以看出,4個液壓缸之間的同步誤差值大小不超過1.5 mm,基本控制在1 mm以內,而圖12b中的最大誤差達到了4 mm,因此,多缸耦合控制相對于主從控制的同步精度有較大的提高,說明該控制方法不僅具有較高的同步控制精度,而且具有較好的穩定性。
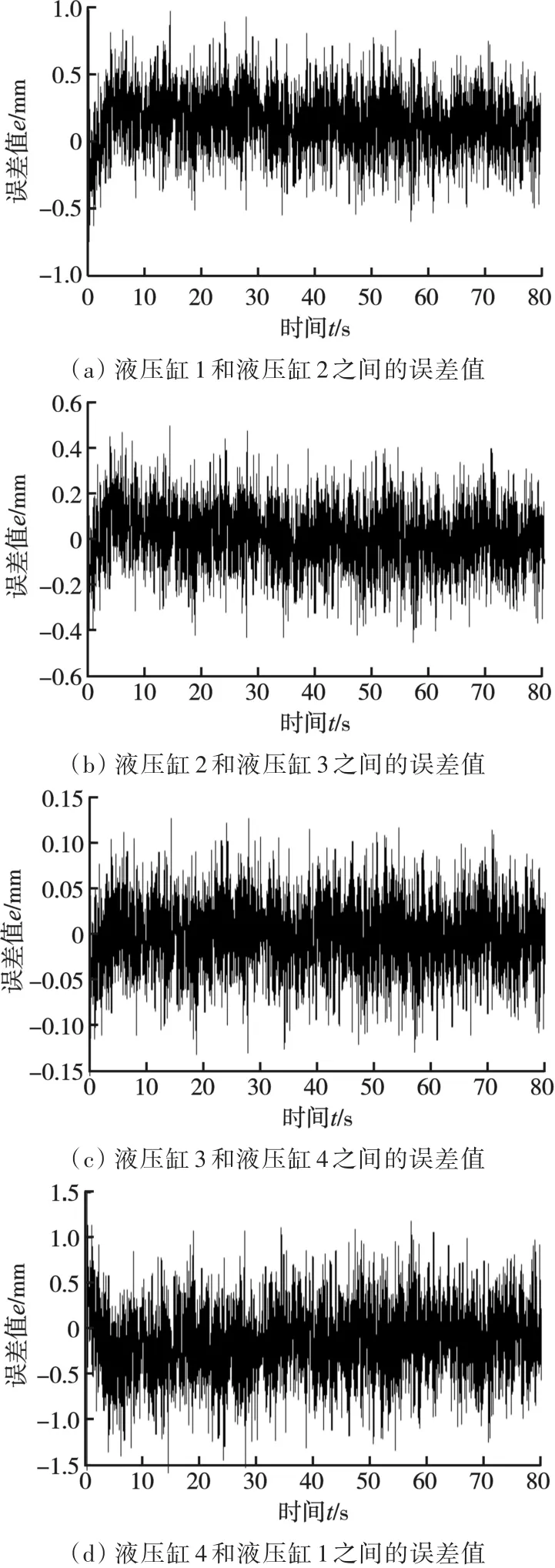
圖11 多缸耦合同步控制液壓缸誤差值Fig.11 Hydraulic cylinder error value of multi-cylinder coupling synchronization control
4 結論
(1)針對海洋工程大型結構物模塊三維對接,設計了一種新型三自由度裝置,滿足最大調整距離150 mm的工程要求,通過多臺裝置聯動使用可以實現對接結構物六自由度的調整,其同步誤差控制在1.5 mm以內。
(2)針對三維重載對接多缸同步控制,提出了一種多缸耦合的控制方式,并利用模糊PID算法對耦合系數進行求解。將仿真結果同主從控制方式的仿真結果進行對比,主從控制最大誤差為4 mm,而多缸耦合控制方式誤差基本在1 mm以內,且仿真時間在80 s以內,主從控制下誤差消除有明顯的滯后,而多缸耦合控制能快速消除誤差,表明采用多缸耦合的控制方式具有較高的同步精度,且在系統突然加減速時具有較好的穩定性。
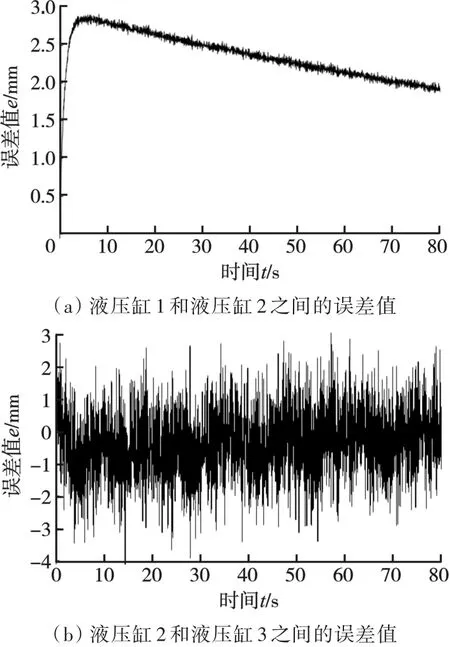
圖12 主從同步控制液壓缸誤差值Fig.12 Hydraulic cylinder error value of master-slave synchronization control
[1] 杜利楠.我國海洋工程裝備制造業的發展潛力研究[D].大連:大連海事大學,2012.DU Li'nan.Research on the Development Potential of China's Marine Engineering Equipment Manufacturing Industry[D].Dalian:Dalian Maritime University,2012.
[2] 鄭雄勝,芮曉松.基于PLC的大型船體分段合攏對接控制系統[J].船舶工程,2011,33(3):65-68.ZHENG Xiongsheng,RUI Xiaosong.Automatic Assem?bling Control System of Large Ship Body Section Based on PLC[J].Ship Engineering,2011,33(3):65-68.
[3] 黎良思,黃義萍,王志翔.模糊控制在液壓閉環同步系統中的應用研究[J].電子科技,2015,28(11):147-149.LI Liangsi,HUANG Yiping,WANG Zhixiang.Study and Application of Fuzzy Control in the Hydraulic Closed-loop Synchronous System[J].Electronic Sci.&Tech.,2015,28(11):147-149.
[4] 趙梅玲.主從系統同步控制策略及應用研究[D].合肥:合肥工業大學,2012.ZHAO Meiling.The Sstrategy and Research on Syn?chronous Control of Master-slave System[D].Hefei:Hefei University of Technology,2012.
[5] 李志峰,趙志誠.基于模型參考模糊自適應的多缸同步控制[J].太原科技大學學報,2010,31(4):266-270.LI Zhifeng,ZHAO Zhicheng.Multi-cylinder Synchroni?zation Control Based on Model Reference Fuzzy Adap?tive Method[J].Journal of Taiyuan University of Sci?ence&Technology,2010,31(4):266-270.
[6] 熊正清,張亮.基于IMC-PID的大型重載多缸升降平臺同步控制算法[J].重慶理工大學學報(自然科學版),2014,28(11):40-43.XIONG Zhengqing,ZHANG Liang.Synchronous Con?trol Algorithm and Simulation of Large Heavy Cylinder Lifting Platform Based on IMC-PID[J].Journal of ChongqingUniversityof Technology(Natural Sci?ence),2014,28(11):40-43.
[7] 劉忠偉,湯迎紅,鄧英劍.巨型模鍛液壓機驅動與同步過程聯合控制的研究[J].機械科學與技術,2016,35(4):514-522.LIU Zhongwei,TANG Yinghong,DENG Yingjian.Re?search on Joint Control of Combined Drivers with Syn?chronization for Giant Forging Hydraulic Press[J].Me?chanical Science&Technology for Aerospace Engi?neering,2016,35(4):514-522.
[8] 李江波.巨型液壓機同步平衡系統特性分析及控制策略研究[D].長沙:中南大學,2011.LI Jiangbo.Research of the Giant Die Forging Hydrau?lic Press's Active Synchronization Control System[D].Changsha:Central South University,2010.
[9] 曹玲芝,李春文,牛超,等.基于相鄰交叉耦合的多感應電機滑模同步控制[J].電機與控制學報,2008,12(5):586-592.CAO Lingzhi,LI Chunwen,NIU Chao,et al.Synchro?nized Sliding-mode Control for Multi-induction Motors Based on Adjacent Cross-coupling[J].Electric Ma?chines&Control,2008,12(5):586-592.
[10] 蔣近,戴瑜興,郜克存,等.多線切割機走線系統的張 力 控 制[J].機 械 工 程 學 報 ,2011,47(5):183-187.JIANG Jin,DAI Yuxing,GAO Kecun,et al.Tension Control of Wire-traveling System for Multi-wire Saw[J].Journal of Mechanical Engineering,2011,47(5):183-187.
[11] SUN Dong,WANG Can,SHANG Wen,et al.A Syn?chronization Approach to Trajectory Tracking of Mul?tiple Mobile Robots While Maintaining Time-varying Formations[J].IEEE Transactions on Robotics,2009,25(5):1074-1086.
[12] 肖海峰,李凱.改進型相鄰耦合誤差的多電機同步控制策略[J].自動化與儀器儀表,2014(9):148-149.XIAO Haifeng,LI Kai.Multi Motor Synchronous Con?trol Strategy Based on Improved Adjacent Coupling Error[J].Automation&Instrumentation,2014(9):148-149.
[13] 王國棟,何友輝,肖聚亮,等.基于AMESim的筒閥多缸同步系統建模及動態特性仿真[J].天津大學學報,2011,44(10):890-895.WANG Guodong,HE Youhui,XIAO Juliang,et al.Molding and Dynamic Characteristics Analysis for Multi-cylinder Synchronous Control System of Ring Gate Based on AMESim[J].Journal of Tianjin Uni?versity,2011,44(10):890-895.
[14] 肖聚亮,宋偉科,王國棟,等.水輪機筒閥電液同步控制系統數學建模與仿真[J].天津大學學報(自然科學與工程技術版),2009,28(2):105-112.XIAO Juliang,SONG Weike,WANG Guodong,et al.Mathematical Modeling and Simulation of Electro-hy?draulic Synchronous Control System of Ring Gate for Hydraulic Turbine[J].Journal of Tianjin University,2009,42(2):105-112.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32