基于ARM的高性能交流伺服電機(jī)系統(tǒng)設(shè)計(jì)
2018-06-04 02:07:25張燕紅張建生吳政濤
微特電機(jī) 2018年5期
張燕紅,王 磊,吳 璇,張建生,吳政濤
(1.常州工學(xué)院,常州 213032;2. 中兵通信科技股份有限公司,新鄉(xiāng) 453000;3.南通大學(xué),南通 226019;4.常州大學(xué),常州 213164)
基于ARM的高性能交流伺服電機(jī)系統(tǒng)設(shè)計(jì)
張燕紅1,王 磊2,吳 璇3,張建生1,吳政濤4
(1.常州工學(xué)院,常州 213032;2. 中兵通信科技股份有限公司,新鄉(xiāng) 453000;3.南通大學(xué),南通 226019;4.常州大學(xué),常州 213164)
摘 要:分析了永磁同步電動(dòng)機(jī)的工作原理,利用S3C2440芯片的軟硬件裁剪式優(yōu)點(diǎn),設(shè)計(jì)了基于S3C2440控制的高性能交流伺服電機(jī)系統(tǒng)。系統(tǒng)的硬件主要包括控制模塊、驅(qū)動(dòng)模塊及電流檢測(cè)模塊,簡(jiǎn)化了電路的復(fù)雜程度。系統(tǒng)采用電流環(huán)和速度環(huán)的雙閉環(huán)PI矢量控制策略,對(duì)伺服電機(jī)系統(tǒng)進(jìn)行實(shí)驗(yàn)研究,實(shí)驗(yàn)結(jié)果表明設(shè)計(jì)的交流伺服電機(jī)系統(tǒng)具有較高的控制精度。
關(guān)鍵詞:永磁同步電動(dòng)機(jī);S3C2440;雙閉環(huán)PI控制策略;高性能伺服系統(tǒng)
0 引 言
伺服電機(jī)系統(tǒng)通過(guò)控制電機(jī)來(lái)帶動(dòng)機(jī)械負(fù)載轉(zhuǎn)動(dòng),并實(shí)現(xiàn)對(duì)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩和位置的精準(zhǔn)控制[1]。隨著電力電子器件和制造業(yè)的迅速發(fā)展,電機(jī)也在更新?lián)Q代,其中,永磁同步電動(dòng)機(jī)(以下簡(jiǎn)稱(chēng)PMSM)已被成功應(yīng)用于高性能伺服系統(tǒng)中。PMSM是一種交流電機(jī),且結(jié)構(gòu)簡(jiǎn)單,體積小,不像直流電機(jī)那樣換向,無(wú)需勵(lì)磁電路,具有高轉(zhuǎn)矩比、高效率等優(yōu)點(diǎn)[2]。在交流伺服系統(tǒng)中,PMSM作為執(zhí)行元件,接收系統(tǒng)控制器輸出的電信號(hào),并將其轉(zhuǎn)換成電機(jī)軸上的角速度和角位移[3]。而控制器接收到傳感器檢測(cè)電機(jī)的反饋信號(hào),經(jīng)過(guò)信號(hào)處理,輸出相應(yīng)的控制信號(hào)來(lái)控制電機(jī),從而保證了整個(gè)控制系統(tǒng)的穩(wěn)定運(yùn)行[4]。常用的交流伺服系統(tǒng)控制器芯片有單片機(jī)、PLC及DSP[5-7],這些芯片雖然實(shí)現(xiàn)了一定的控制要求,但內(nèi)部集成模塊太少,需要擴(kuò)展外圍模塊,導(dǎo)致電路結(jié)構(gòu)復(fù)雜,成本較高。由于ARM芯片的外圍模塊豐富,芯片為裁剪式,控制性能好,性?xún)r(jià)比較高,所以適合應(yīng)用于高性能交流伺服系統(tǒng)的控制[8]。本文設(shè)計(jì)了一種基于S3C2440控制的高性能交流伺服電機(jī)系統(tǒng),以提高伺服系統(tǒng)的控制精度。
1 伺服系統(tǒng)的控制原理
1.1 d-q坐標(biāo)系下的PMSM數(shù)學(xué)模型
PMSM系統(tǒng)具有時(shí)變性、非線(xiàn)性和強(qiáng)耦合性,且電磁關(guān)系非常復(fù)雜,是一個(gè)復(fù)雜的多輸入多輸出的非線(xiàn)性物理模型,具有更低的傳導(dǎo)損耗。因此,為了使系統(tǒng)的變量之間得到部分解耦,系統(tǒng)的數(shù)學(xué)模型大大簡(jiǎn)化,便于系統(tǒng)的分析和控制,在研究PMSM的物理模型時(shí),需作如下的設(shè)定:
①忽略磁路飽和、鐵心損耗、磁滯損耗和渦流;
②三相繞組均勻?qū)ΨQ(chēng),在空間上互相差120°;
③忽略空間諧波,感應(yīng)電動(dòng)勢(shì)和磁動(dòng)勢(shì)按正弦波分布。
同步旋轉(zhuǎn)d-q坐標(biāo)系下的電機(jī)數(shù)學(xué)模型,通常由動(dòng)態(tài)電壓方程、磁鏈方程、轉(zhuǎn)矩方程和運(yùn)動(dòng)方程組成。其中,電壓方程:
(1)
式中:id,iq分別為d,q軸的電流分量;ψd,ψq分別為d,q軸的磁鏈分量;ωr為轉(zhuǎn)子的角速度;Rs為定子電阻。
磁鏈方程:
(2)
式中:Ld,Lq分別為d,q軸的電感分量;ψr為轉(zhuǎn)子磁鏈。
電磁轉(zhuǎn)矩方程:
(3)
式中:p為電機(jī)極對(duì)數(shù)。
運(yùn)動(dòng)方程:
(4)
式中:J為轉(zhuǎn)動(dòng)慣量;B為轉(zhuǎn)子粘滯摩擦系數(shù);TL為負(fù)載轉(zhuǎn)矩。
1.2 矢量控制策略的控制原理
PMSM伺服系統(tǒng)是一個(gè)強(qiáng)耦合、非線(xiàn)性的復(fù)雜系統(tǒng),需選擇合適的控制策略來(lái)提高系統(tǒng)的控制效果。矢量控制策略(以下簡(jiǎn)稱(chēng)VC)因具有響應(yīng)速度快、轉(zhuǎn)矩脈動(dòng)低、控制精度高等優(yōu)點(diǎn)而被廣泛應(yīng)用于高性能交流伺服系統(tǒng)中[9]。由式(3)、式(4)可知,有效控制電流id和iq,即可達(dá)到控制電機(jī)穩(wěn)定運(yùn)行的效果。矢量控制的原理就是通過(guò)分別控制相互正交和獨(dú)立的電流id和iq來(lái)實(shí)現(xiàn)系統(tǒng)的解耦控制。
PMSM矢量控制系統(tǒng)的結(jié)構(gòu)如圖1所示,系統(tǒng)采用電流內(nèi)環(huán)和速度外環(huán)的雙閉環(huán)矢量控制策略。

圖1 矢量控制結(jié)構(gòu)圖
其中,電流內(nèi)環(huán)主要負(fù)責(zé)電機(jī)的轉(zhuǎn)矩能否快速響應(yīng),本文采用經(jīng)典的PI控制器,P環(huán)節(jié)主要用來(lái)提高系統(tǒng)的響應(yīng)速度;I環(huán)節(jié)則可以減小系統(tǒng)的穩(wěn)態(tài)誤差。兩路PI 控制器分別以id和iq的偏差值為給定值,以u(píng)dref和uqref為輸出值。速度外環(huán)對(duì)整個(gè)系統(tǒng)的調(diào)速起決定性作用,需要有較好的抗干擾性能,也采用PI控制器。在速度環(huán)中,位置檢測(cè)裝置通過(guò)光電編碼器檢測(cè)PMSM轉(zhuǎn)過(guò)的角度θ,然后計(jì)算出PMSM的角速度ωr,并以ωr的偏差值作為速度PI的輸入值,以iqref為輸出值。空間矢量脈寬調(diào)制(SVPWM)主要是將逆變器和電機(jī)看作一體,按照跟蹤圓形旋轉(zhuǎn)磁場(chǎng)來(lái)控制PWM電壓。SVPWM逆變器按照一定的時(shí)間切換不同的開(kāi)關(guān)模式,產(chǎn)生三相正弦電壓,從而控制PMSM的轉(zhuǎn)動(dòng)[10]。
系統(tǒng)采用id=0的矢量控制方式,此時(shí)電磁轉(zhuǎn)矩方程:
(5)
式中:Ke可看作電磁轉(zhuǎn)矩系數(shù),為定值。
根據(jù)式(1)、式(2)、式(4)、式(5),可得出PMSM的解耦狀態(tài)方程:
(6)
結(jié)合系統(tǒng)所采用的雙閉環(huán)矢量控制策略,可設(shè)計(jì)出PMSM的雙閉環(huán)控制框圖如圖2所示。

圖2 雙閉環(huán)控制框圖

圖3 等效速度閉環(huán)控制框圖

(7)
(8)
其中,式(7)為速度傳遞函數(shù),式(8)為負(fù)載轉(zhuǎn)矩傳遞函數(shù)。
2 系統(tǒng)硬件設(shè)計(jì)
本文設(shè)計(jì)的高性能伺服系統(tǒng)的硬件結(jié)構(gòu)圖如圖4所示。

圖4 硬件結(jié)構(gòu)圖
主控制器采用S3C2440芯片,驅(qū)動(dòng)器采用DH50M-A,PMSM則采用110DH-A06020H。系統(tǒng)的工作原理:主控制器將PWM信號(hào)傳送到驅(qū)動(dòng)器,通過(guò)控制IGBT的導(dǎo)通時(shí)間來(lái)驅(qū)動(dòng)PMSM的轉(zhuǎn)動(dòng);電流檢測(cè)模塊檢測(cè)PMSM的三相電流,經(jīng)過(guò)處理后送至主控制器的ADC,S3C2440通過(guò)獲得的電流信號(hào)和轉(zhuǎn)速信號(hào)來(lái)進(jìn)行雙閉環(huán)PI控制,并輸出新的PWM信號(hào)。
2.1 控制模塊
主控芯片S3C2440是一款基于ARM9內(nèi)核的16/32位RISC微處理器,并附有豐富的通用外設(shè)模塊。該芯片可采用裁剪式,去除空置的外設(shè),只留下需用的外設(shè),以減少系統(tǒng)的成本和體積。其中AD轉(zhuǎn)換接口,可將電流檢測(cè)模塊發(fā)送的模擬電壓信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),再送至S3C2440進(jìn)行控制。具有PWM功能的定時(shí)器在S3C2440的控制下,向逆變器輸出PWM波形,從而形成三相正弦電壓供給PMSM。由于PMSM需要6路脈沖控制,可用2個(gè)通用定時(shí)器來(lái)完成。此外,還需要1個(gè)定時(shí)器來(lái)接收光電編碼器發(fā)送的脈沖信號(hào),根據(jù)公式進(jìn)一步計(jì)算出電機(jī)的轉(zhuǎn)速。還有一些I/O口可用于中斷控制;USART口可用來(lái)與PC機(jī)連接通信,JTAG口則用來(lái)下載程序和在線(xiàn)調(diào)試;還有一些按鍵,用于顯示屏上的調(diào)速和調(diào)頻。
2.2 驅(qū)動(dòng)模塊
DH50M-A接收主控制器S3C2440發(fā)出的控制信號(hào),通過(guò)SVPWM技術(shù),形成三相正弦波電壓來(lái)驅(qū)動(dòng)PMSM轉(zhuǎn)動(dòng),達(dá)到伺服系統(tǒng)的精準(zhǔn)控制。110DH-A06020H電機(jī)需與DH50M-A相匹配。DH50M-A內(nèi)部有設(shè)計(jì)好的驅(qū)動(dòng)放大電路,可將S3C2440發(fā)出的弱電信號(hào)放大為電機(jī)所需要的強(qiáng)電信號(hào)。DH50M-A在電源供電時(shí)需接1個(gè)380~220 V的三相隔離變壓器,以保證DH50M-A不被損壞。本文所選用的電機(jī)內(nèi)部帶有光電編碼器,可測(cè)出電機(jī)的轉(zhuǎn)動(dòng)信號(hào),并反饋至DH50M-A中,通過(guò)主控制器的控制和計(jì)算,可得出電機(jī)的角速度和轉(zhuǎn)速,該驅(qū)動(dòng)器中已設(shè)計(jì)好過(guò)流、過(guò)壓和過(guò)熱等保護(hù)電路。
2.3 其他模塊
系統(tǒng)還設(shè)計(jì)了1個(gè)電流檢測(cè)電路,使用2個(gè)霍爾電流傳感器采集PMSM的A相和B相電流信號(hào),并通過(guò)計(jì)算得出C相電流信號(hào)。霍爾傳感器采用CSNE151-100,其輸出信號(hào)已轉(zhuǎn)為電壓信號(hào),將該信號(hào)送至主控制器S3C2440的AD轉(zhuǎn)換模塊。由于信號(hào)容易受到干擾,因此需要對(duì)傳感器所輸出的信號(hào)進(jìn)行RC濾波,電路圖如圖5所示。CSNE151-100的電壓輸出信號(hào)經(jīng)濾波后,接入1個(gè)電壓跟隨器來(lái)減小阻抗,同時(shí)對(duì)其進(jìn)行電壓保護(hù),并再次對(duì)該信號(hào)進(jìn)行濾波,隨后送至主控制器的ADC轉(zhuǎn)換接口。
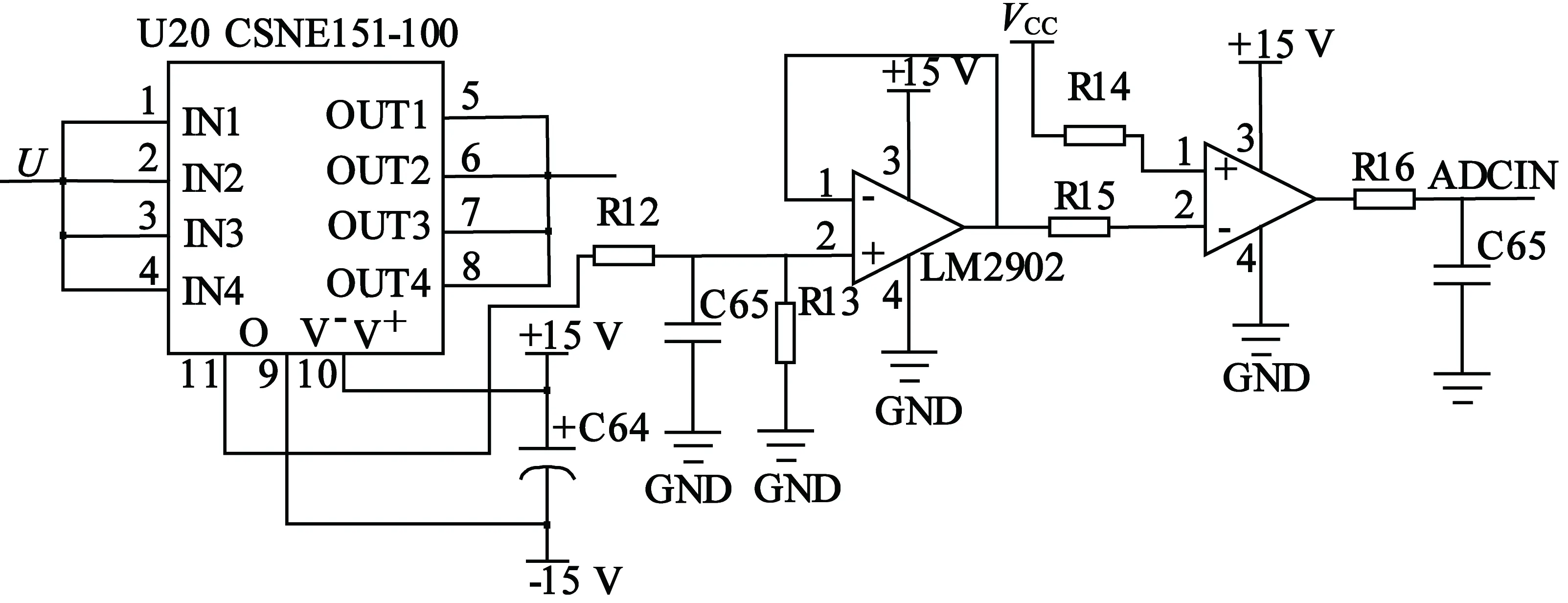
圖5 電流檢測(cè)電路
本文所設(shè)計(jì)的伺服系統(tǒng)需要多種電源供電,如PC機(jī)和變壓器需要電網(wǎng)電壓AC 220V,電流檢測(cè)電路和濾波電路均需要±15 V的電壓,在實(shí)驗(yàn)室中可由±15 V的開(kāi)關(guān)電源來(lái)實(shí)現(xiàn);如主控制器S3C2440需要5 V的電壓,此時(shí)需要通過(guò)電源轉(zhuǎn)換模塊,如圖6所示,采用了LM2596S 5.0開(kāi)關(guān)電壓調(diào)節(jié)芯片,可將開(kāi)關(guān)電源的15 V轉(zhuǎn)換為所需要的電壓值5 V。

圖6 電源轉(zhuǎn)換電路
3 系統(tǒng)軟件設(shè)計(jì)
本文選用Linux嵌入式操作系統(tǒng),它是遵循GPL協(xié)議的開(kāi)放源碼操作系統(tǒng),全部免費(fèi),日后軟件的維護(hù)也相對(duì)簡(jiǎn)單[12]。使用的編譯器為ARM-Linux-gcc4.3.3版本,內(nèi)核為L(zhǎng)inux-2.6.30.4。考慮到ARM板的存儲(chǔ)空間有限,而內(nèi)核的配置文件非常多,因此需對(duì)內(nèi)核進(jìn)行適當(dāng)裁剪,去掉不需要的功能,只留下需要的芯片類(lèi)型、文件系統(tǒng)和驅(qū)動(dòng)程序。
S3C2440實(shí)現(xiàn)的功能有電機(jī)電流和轉(zhuǎn)速的數(shù)據(jù)處理、電流控制器和速度控制器的控制、電機(jī)轉(zhuǎn)向的控制、SVPWM模塊的控制、6路PWM波的輸出等。軟件設(shè)計(jì)的工作就是在PC機(jī)上修改內(nèi)核中和系統(tǒng)硬件相關(guān)的源代碼文件,編程語(yǔ)言為C語(yǔ)言,并通過(guò)PC機(jī)和S3C2440板通信,使移植后的內(nèi)核能在S3C2440平臺(tái)上穩(wěn)定運(yùn)行。其中,電機(jī)的轉(zhuǎn)向和轉(zhuǎn)速會(huì)在S3C2440顯示屏上顯示,并通過(guò)按鍵來(lái)調(diào)整電機(jī)的轉(zhuǎn)速值。
程序流程圖如圖7所示,以主程序?yàn)橹鳌.?dāng)系統(tǒng)上電后,開(kāi)始參數(shù)初始化,然后等待循環(huán)。當(dāng)發(fā)生外部中斷時(shí),程序從中斷地址入口進(jìn)入,并開(kāi)始工作,中斷程序如圖8所示。系統(tǒng)的控制部分由中斷程序完成,主要有速度環(huán)、電流環(huán)的參數(shù)計(jì)算和SVPWM波的生成。中斷結(jié)束后,程序返回到主循環(huán)處,繼續(xù)工作。

圖7 主程序流程圖
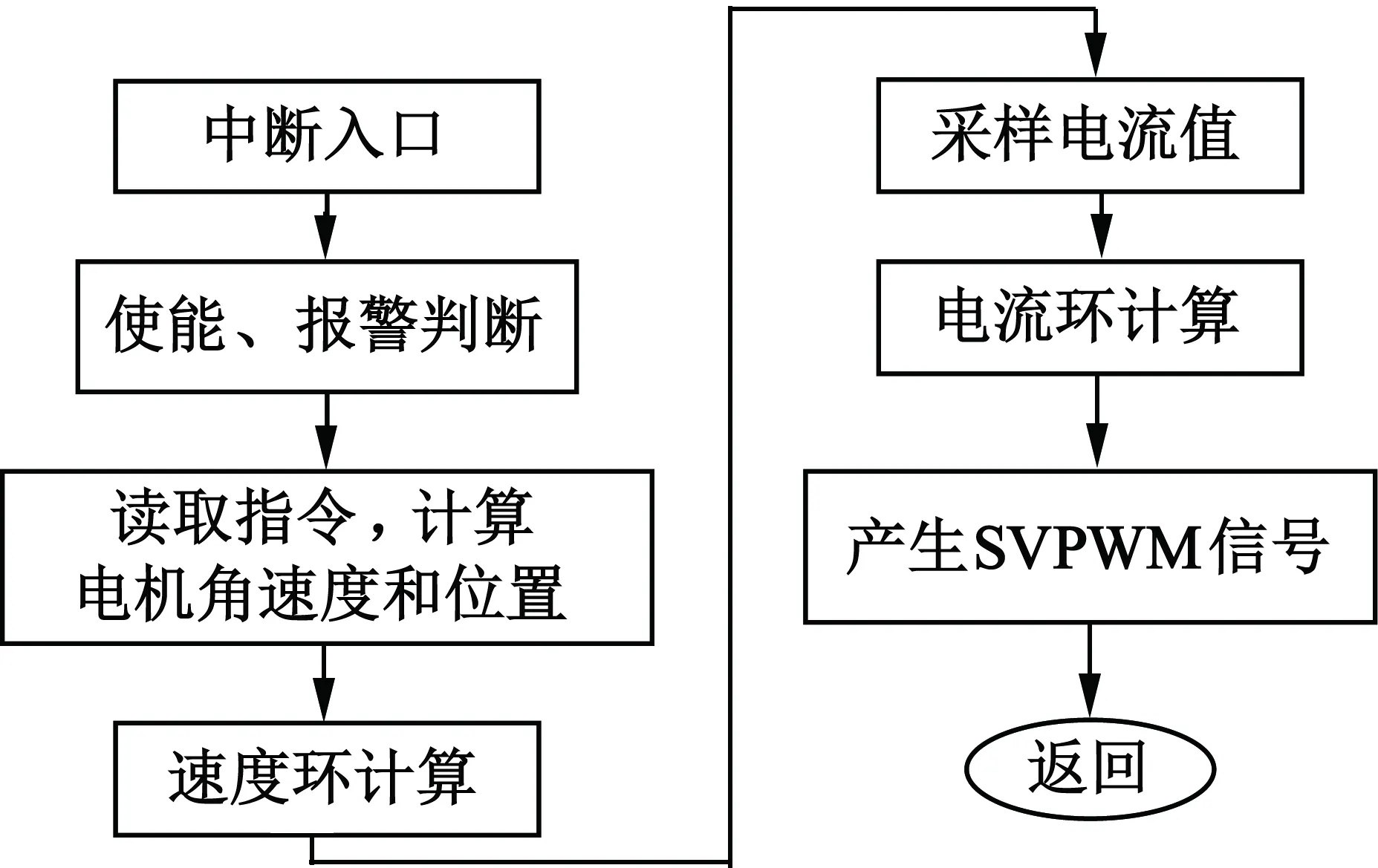
圖8 中斷程序流程圖
4 系統(tǒng)實(shí)驗(yàn)
伺服電機(jī)系統(tǒng)中的PMSM參數(shù)如表1所示,型號(hào)為110DH-A06020H。
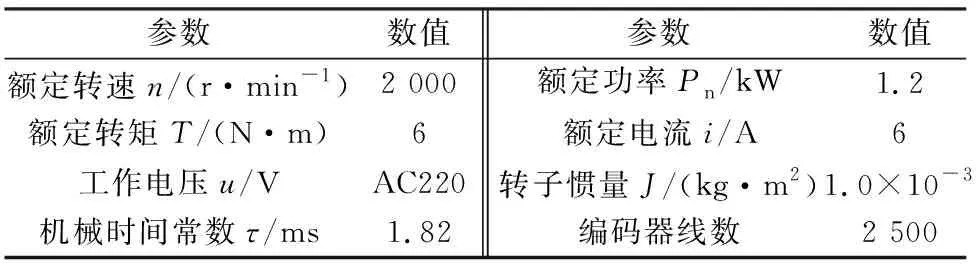
表1 電機(jī)參數(shù)
轉(zhuǎn)子磁鏈ψr=0.3 Wb,電機(jī)極對(duì)數(shù)p=2,轉(zhuǎn)動(dòng)慣量J=1.0×10-3kg·m2,電機(jī)角速度ωrref=200 rad/s,電感Lq=6.5 mH。取參數(shù)Kp=112,Ki=54,可計(jì)算出PMSM的速度傳遞函數(shù):
(9)
搭建的系統(tǒng)硬件實(shí)驗(yàn)平臺(tái)如圖9所示。

圖9 實(shí)驗(yàn)硬件圖
實(shí)驗(yàn)中用示波器來(lái)觀察電機(jī)的控制波形,設(shè)定電機(jī)轉(zhuǎn)速為2 000 r/min作為給定信號(hào),電機(jī)開(kāi)始轉(zhuǎn)動(dòng),經(jīng)過(guò)80 ms,電機(jī)轉(zhuǎn)速降為0,可得到控制波形圖如圖10所示。
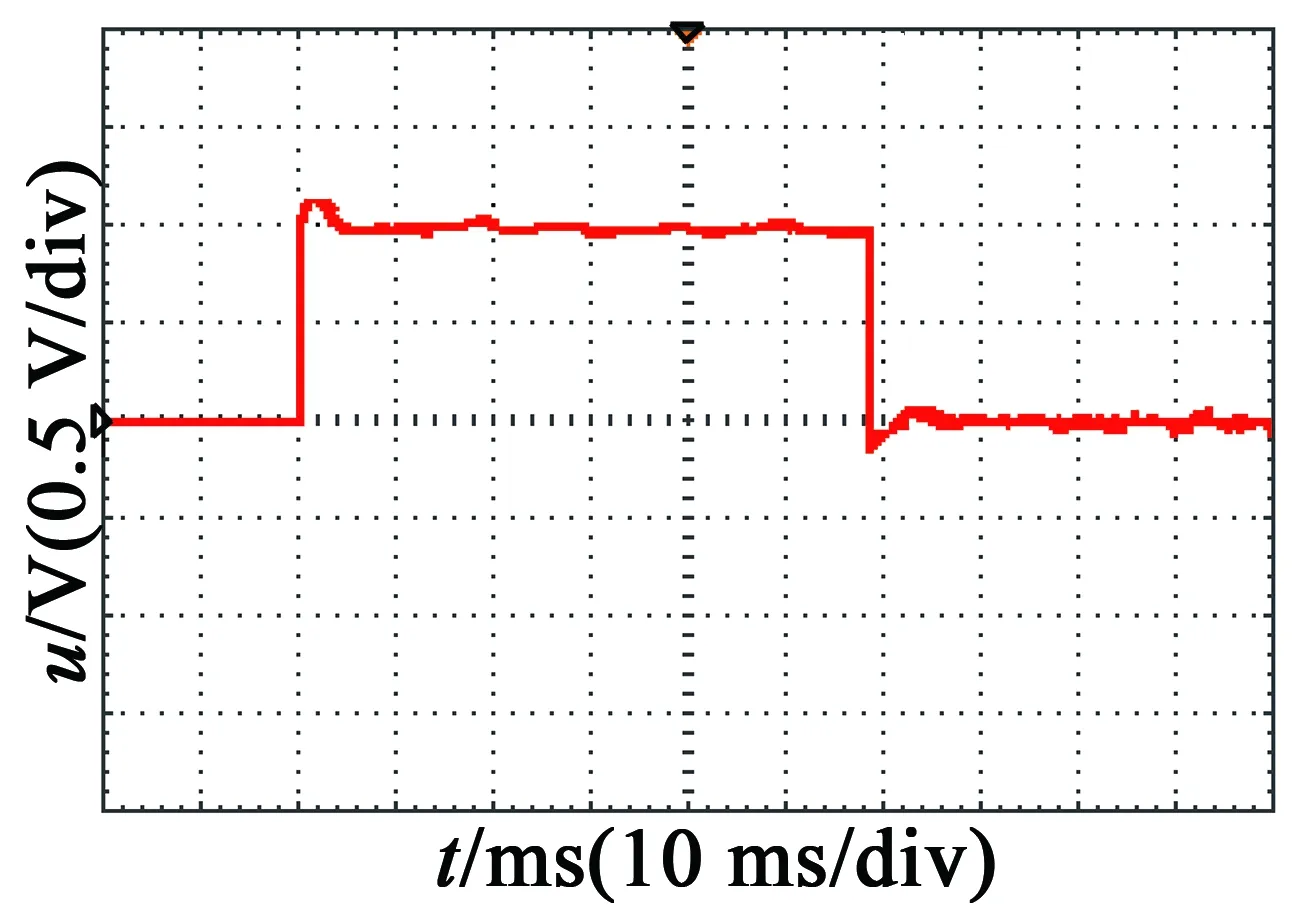
圖10 電機(jī)控制波形圖
從圖10可以看出,電機(jī)的速度響應(yīng)時(shí)間僅為25 ms,超調(diào)量為0.2%。從這2個(gè)指標(biāo)來(lái)看,系統(tǒng)可保證電機(jī)快速起動(dòng)和制動(dòng),且轉(zhuǎn)速變化時(shí)波動(dòng)很小,運(yùn)行平穩(wěn)。表明設(shè)計(jì)的高性能伺服系統(tǒng)的響應(yīng)速度和動(dòng)態(tài)性能都較好,控制系統(tǒng)是有效可行的。可以應(yīng)用在機(jī)器人、自動(dòng)化生產(chǎn)線(xiàn)等對(duì)工藝精度、加工效率和工作可靠性等要求相對(duì)較高的設(shè)備。
采用電流檢測(cè)電路獲得的U相電流波形如圖11所示(測(cè)量時(shí)在電路中外加1 Ω的電阻,實(shí)際測(cè)得的是電壓波形),其它兩相基本一致。
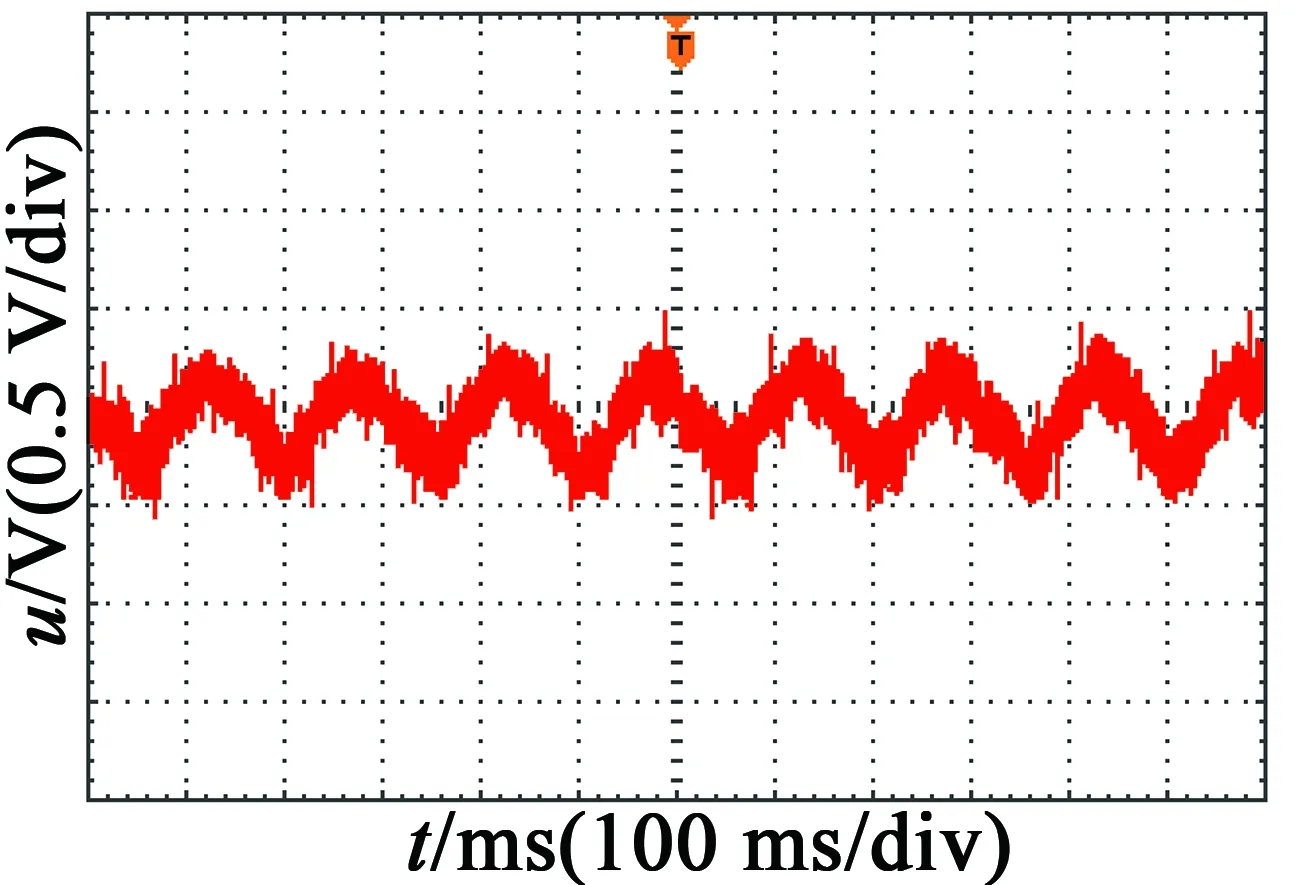
圖11 U相電流波形
從圖11可知,U相電流為正弦波形,幅值不超過(guò)0.5 V(對(duì)應(yīng)的電流為0.5 A),而一般的U相電流會(huì)達(dá)到0.5~1 A,相比而言,本文測(cè)試的U相電流波形比較光滑。表明本文設(shè)計(jì)的控制程序能夠較好地控制相電流,保證了電機(jī)的轉(zhuǎn)動(dòng)精度和平穩(wěn)運(yùn)行。
5 結(jié) 語(yǔ)
本文設(shè)計(jì)的高性能交流伺服電機(jī)控制系統(tǒng),采用了S3C2440做主控器,并選擇Linux系統(tǒng)來(lái)移植控制程序,設(shè)計(jì)了相關(guān)的硬件模塊和軟件控制模塊。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)對(duì)電機(jī)的控制是有效可行的。而S3C2440控制器可實(shí)行軟硬件裁剪式,節(jié)約成本的同時(shí),降低了系統(tǒng)的復(fù)雜性,簡(jiǎn)化了應(yīng)用程序,能夠使電機(jī)平穩(wěn)運(yùn)行,提高了控制精度,為交流伺服系統(tǒng)提供了新的控制方式。
[1] 桑勇,李鋒濤,代月幫,等.面向伺服電機(jī)的STM32單片機(jī)控制系統(tǒng)設(shè)計(jì)[J].機(jī)電工程技術(shù),2015,44(11):65-72.
[2] 高靖凱,林榮文,張潤(rùn)波.永磁同步電機(jī)直接轉(zhuǎn)矩控制的研究及算法改進(jìn)[J].電機(jī)與控制應(yīng)用,2015,42(11):16-20.
[3] 孫宇,王志文,孔凡莉,等.交流伺服系統(tǒng)設(shè)計(jì)指南[M].北京:機(jī)械工業(yè)出版社,2013.
[4] 王成元.現(xiàn)代電機(jī)控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2013.
[5] 李紅偉,胡濤,徐熙平,等.基于單片機(jī)的伺服電機(jī)控制系統(tǒng)的研究[J].長(zhǎng)春理工大學(xué)學(xué)報(bào),自然科學(xué)版,2012 (1):116-118.
[6] 強(qiáng)明輝,張彥龍,馬永煒,等.基于CAN總線(xiàn)多軸伺服控制系統(tǒng)的研究與應(yīng)用[J].電氣傳動(dòng),2016,46(2):60-64.
[7] 王新君,巫慶輝,申慶歡.基于DSP的PMSM矢量控制的優(yōu)化設(shè)計(jì)與實(shí)現(xiàn)[J].微特電機(jī),2016,44(3):62-64.
[8] 趙瑩,杜艷麗,李艷娟,等.基于ARM的磁浮軸承控制器的設(shè)計(jì)[J].機(jī)床與液壓,2016,44(9):74-80.
[9] QUNTAO A,LI S.On-line parameter identification for vector controlled PMSM drives using adaptive algorithm[C]//IEEE Vehicle Power and Propulsion Conference,2008:1-6.
[10] SHAMELI E,KHAMESEE M B,HU ISSOON J P.Nonlinear controller design for a magnetic levitation device[J].Microsystem Technologies,2007,13(5):830- 834.
[11] 郭新華,溫旭輝,趙峰,等.基于電磁轉(zhuǎn)矩反饋補(bǔ)償?shù)挠来磐诫姍C(jī)新型IP速度控制器[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(27):7-13.
[12] 屈杰敏.基于ARM和Linux的嵌入式數(shù)控系統(tǒng)研究與開(kāi)發(fā)[D].南京:南京航空航天大學(xué),2013.
DesignofHigh-PerformanceACServoMotorSystemBasedonARM
ZHANGYan-hong1,WANGLei2,WUXuan3,ZHANGJian-sheng1,WUZheng-tao4
(1.Changzhou Institute of Technology,Changzhou 213032,China;2.China North Communication Technology Co.,Ltd.,Xinxiang 453000,China;3.Nantong University,Nantong 226019,China; 4.Changzhou University,Changzhou 213164,China)
Abstract:The working principle of permanent magnet synchronous motor was analyzed, and a high performance AC servo system based on S3C2440 control was designed by using the advantage of the hardware and software of the S3C2440 chip. The hardware of the system mainly included control module, drive module and current detection module, which simplified the complexity of the circuit. The closed-loop PI vector control strategy of current loop and velocity loop was used. The experimental research of servo system was carried out and the experimental results showed that the control precision of the servo system has been improved.
Key words:permanent magnet synchronous motor (PMSM); S3C2440; double closed-loop PI control strategy; high-performance servo system
中圖分類(lèi)號(hào):TM351;TM464
A
1004-7018(2018)05-0014-05
2017-09-28
國(guó)家自然科學(xué)基金項(xiàng)目(51175052);江蘇省自然科學(xué)基金項(xiàng)目(BK20151182);校級(jí)科研項(xiàng)目(YN1622);江蘇高校品牌專(zhuān)業(yè)建設(shè)工程資助項(xiàng)目(PPZY2015B129);2017年度江蘇高校文化創(chuàng)意協(xié)同創(chuàng)新中心研究項(xiàng)目(XYN1706)
作者簡(jiǎn)介:張燕紅(1979—),女,博士,副教授,主要研究方向?yàn)橹悄芸刂啤?/p>
