低轉矩波動無刷直流電動機提前導通控制方法
2018-06-04 02:07:29胡明樺郭鴻浩
微特電機 2018年5期
楊 艷,胡明樺,郭鴻浩
(南京郵電大學,南京 210023)
低轉矩波動無刷直流電動機提前導通控制方法
楊 艷,胡明樺,郭鴻浩
(南京郵電大學,南京 210023)
摘 要:轉矩波動限制了無刷直流電動機在高精度高穩定性系統中的應用,隨著轉速增加,電機存在轉矩波動增大、輸出轉矩下降等問題。根據等效模型分析了提前換相過程中轉矩波動情況,研究了一種提前導通PWM控制方法。該控制方式使換相時電流的交點提前至反電動勢的交點處,提前角度可隨電機運行狀態變化而動態調整。給出了控制方法實施過程并建立MATLAB/Simulink仿真模型,驗證了控制方法對抑制轉矩波動和減小輸出轉矩效果較明顯。
關鍵詞:無刷直流電動機;轉矩下降;提前換相;低轉矩波動;動態調整
0 引 言
近年來無刷直流電動機因功率因數高、運行可靠且易維護、長壽命等優點得到了廣泛的應用,一系列相應的控制策略也日臻完善。雖然無刷直流電動機性能優勢明顯,但在高精度的伺服控制系統中應用較少。限制無刷直流電動機在上述系統中應用的關鍵原因是無刷直流電動機有較明顯的轉矩波動,抑制轉矩波動一直是無刷直流電動機研究熱點之一[1-5]。一方面通過電機本體設計從多個方面優化來抑制轉矩波動;另一方面通過控制策略對無刷直流電動機轉矩波動進行補償來抑制轉矩波動,取得了一系列成果。文獻[4]采用三相控制策略,將每個PWM周期分成3個區域,每個區域的大小分別決定著電流上升和下降的速率以及換相的快慢,在換相過程中為三相分配合適的占空比就使得關斷相電流的下降速率和導通相電流的上升速率在每個PWM周期內相等,達到消除轉矩波動的目的。該方法在低速時抑制轉矩波動明顯,但在重載或高速的情況下電機換相時間短,而該控制策略每個換相周期需要經過多個PWM調制周期才能消除轉矩波動,因此會存在電機換相失敗的問題。文獻[8]對文獻[4]中的控制策略進行研究,改進了換相過程中三相占空比計算方法,限制換相過程中關斷相的占空比,解決了高速重載下存在的換相失敗問題。
提前導通控制是為了使電流和反電動勢同步,換相時將尚未開通或關閉的開關器件提前一個時間開通,避免電流嚴重滯后于反電動勢。無刷直流電動機同一相電流上升和下降的波形基本對稱,根據相關性定理,當且僅當電流波形的中點與反電動勢波形的中點重合時相電流與反電動勢的乘積最大[2],在這種情況下電機的輸出轉矩最大,為了實現這一條件,必須對電流進行提前導通。文獻[1]給出了最佳超前角計算公式,實時計算超前角可滿足特殊的工作場合。文獻[3]給出了一種通過定子磁鏈實施提前換相的方法,該方法不需主動計算提前換相角,并且換相角可隨相電流大小自動調節,對電機的平均推力提升十分明顯。
本文對于上述2種抑制轉矩波動控制方法進行了深入分析,研究了一種結合上述2種控制方式的低轉矩波動無刷直流電動機提前導通PWM控制方法。通過MATLAB/Simulink建立了無刷直流電動機仿真模型并進行驗證。
1 提前導通PWM控制原理
1.1 電機模型
三相星型連接無刷直流電動機工作在6狀態方式下的等效模型原理圖如圖1所示。為方便分析,做以下假設:三相繞組對稱;忽略齒槽效應和電樞反應;不計磁路飽和、渦流和磁滯損耗[7]。
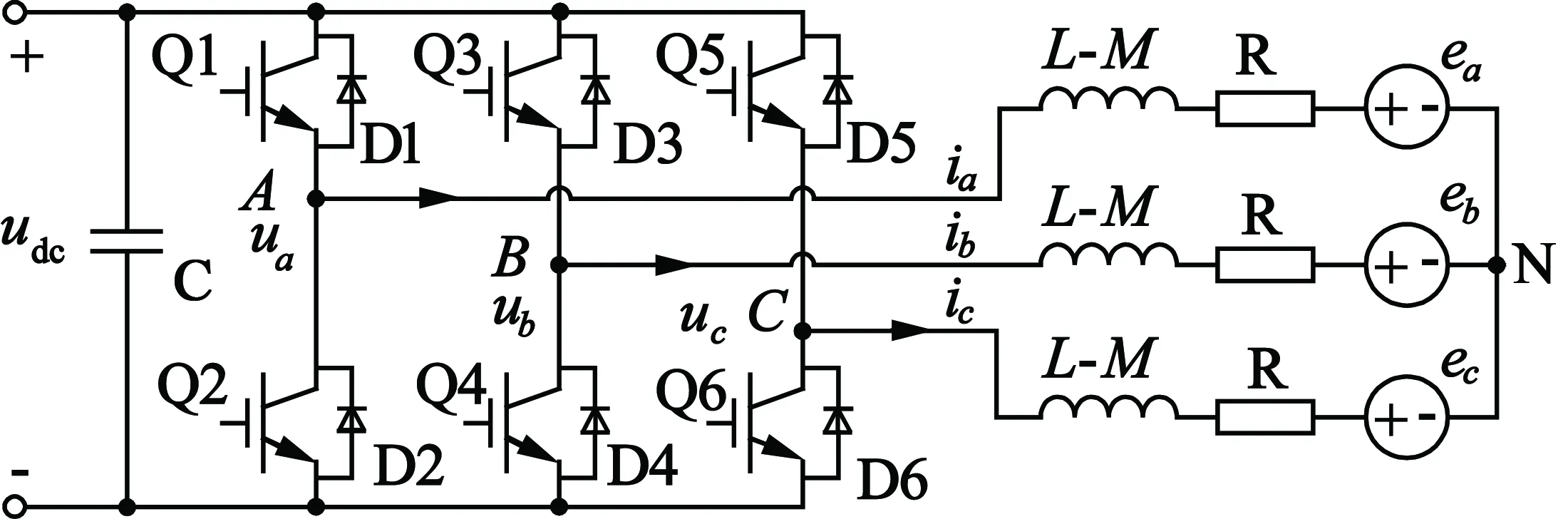
圖1 無刷直流電動機等效原理圖
根據無刷直流電動機的特性,建立無刷直流電動機的數學模型矩陣方程:
(1)
式中:ux,ix,ex(其中x=a,b,c)分別是三相的繞組端電壓、電流瞬時值和反電動勢;R為繞組電阻;附加假設電樞等效電感不受氣隙合成磁通變化影響,L為相繞組電感,M為相繞組的互感,L和M均為常數。用L替代L-M,則等效電路改寫:
(2)
ia+ib+ic=0
(3)
設轉子角速度為ω,極對數為p,電磁轉矩Te:
Teω=p(iaea+ibeb+icec)
(4)
1.2 無刷直流電動機換相過程分析
傳統無刷直流電動機導通時,反電動勢和電流波形如圖2所示。無刷直流電動機繞組電感的存在使得電流上升和下降的速率不可能無限大,換相時間不能為零,電流波形總是滯后于反電動勢波形,從而產生換相轉矩波動。

(a) 低速運行時
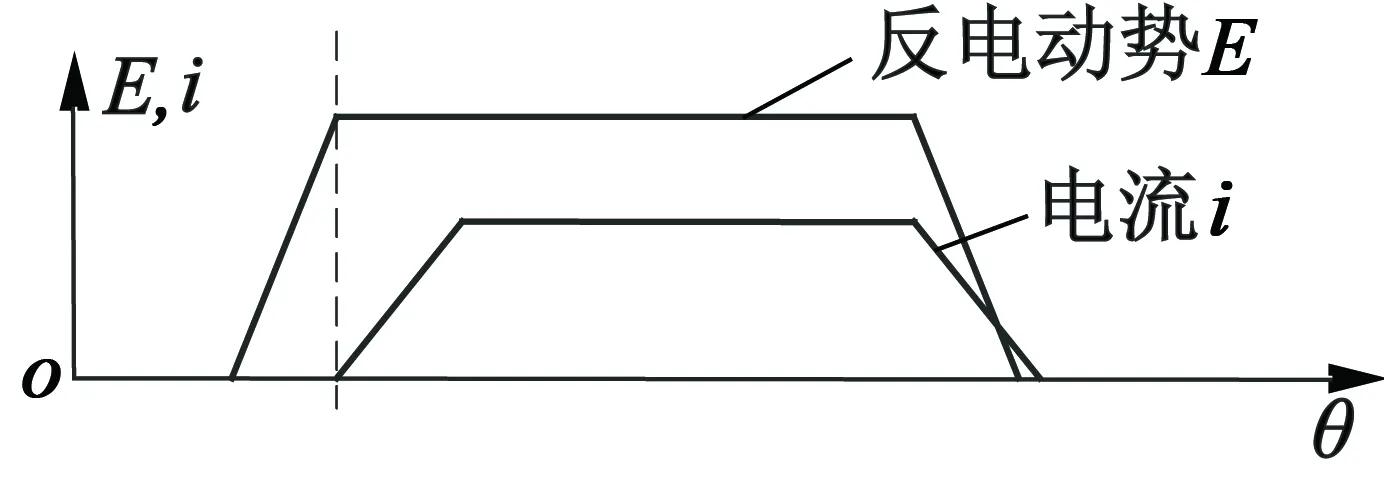
(b) 高速運行時
圖2(a)顯示了電機工作于低速時反電動勢和電流波形,反電動勢和繞組電感相對比較小,電流快速從零上升到穩態值且快速從穩態值下降到零,轉矩波動較小。圖2(b)顯示了電機工作于高速時的反電動勢和電流波形,反電動勢和繞組電感相對比較大,電流從零上升到穩態值有相當一部分空間角度間隔,電流從穩態值下降到零的空間角度間隔也變長,會出現反電動勢已經為零而電流還沒達到零的情況,這種現象會減小電磁轉矩并且增大轉矩脈動及電流紋波。
無刷直流電動機導通過程分為兩相導通狀態和三相導通狀態,又稱為導通區間和換相區間。換相轉矩波動是轉矩波動的主要來源,文獻[6]分析了理想狀態下電機的換相過程,即使電機開通相和關斷相電流斜率相同時也存在轉矩波動。
(5)
式中:Ti為電磁轉矩;Ttc為波動轉矩。
換相過程中非換相相電流保持恒定,電磁轉矩為常值,沒有波動。Ttc是關于θ的二次函數,對θ求一次導,得到關于θ的一次函數,并令等于0。即:
(6)

圖3 換相過程轉矩波動圖
無刷直流電動機提前導通控制轉矩波動將發生變化,換相時三相反電動勢和電流波形如圖4所示。
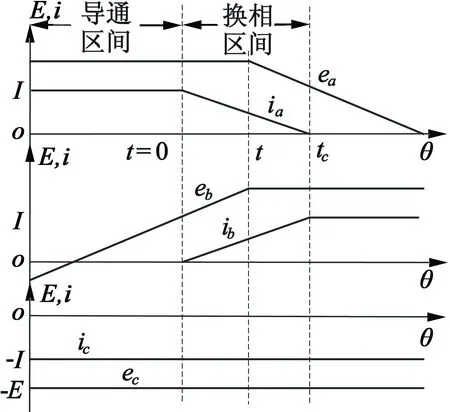
圖4 提前換相反電動勢和電流波形圖
圖4中,換相區間反電動勢的變化需要分段表示,根據以上分析引入提前導通控制,提前量為t。
以AC到BC換相為例,換相過程中開通相和關斷相提前t導通,A相和B相反電動勢分為兩段表示。反電動勢和電流的表示如下:
(7)
(8)
ec=-E
(9)
(10)
(11)
ic=-I
(12)
假設電機在運行過程中轉速恒定,ia,ib,ic為a,b,c相電流,ea,eb,ec為a,b,c相反電動勢,E為反電動勢平頂部分幅值,I為穩態電流幅值,ωe為電磁轉速,把式(7)~式(12)代入式(4)得到電機轉矩表達式:
(13)
式中:ωm為機械角速度。式(13)經過化解后,得到轉矩波動關于提前導通時間t和電機轉子位置角θ的二元二次方程:
(14)
(15)
(16)
換相時的轉矩大幅減小,最優提前導通角時兩個最大值相等,當提前換相非最優時兩個最大值不一定相等。換相過程如圖5所示。
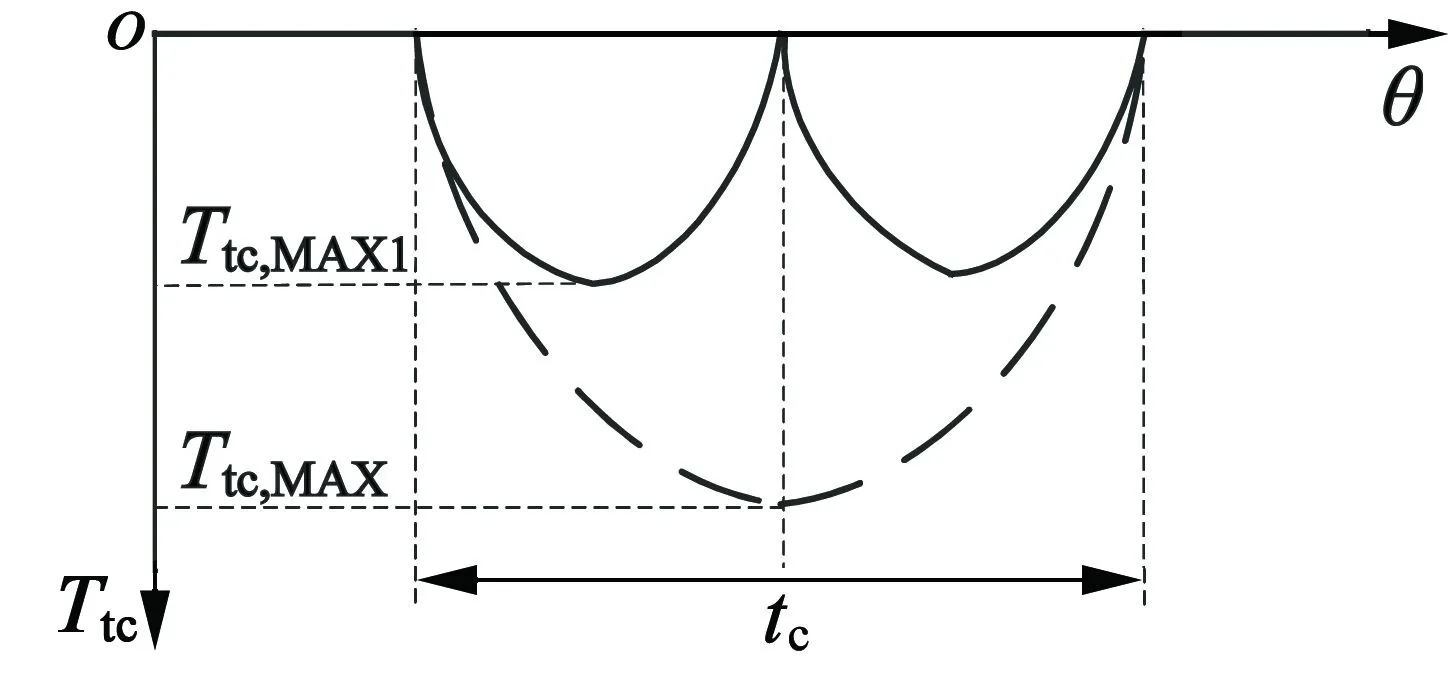
圖5 提前導通換相轉矩波動圖
在換相區間轉矩波動幅度減小,換相轉矩波動得到抑制,高速時轉矩下降的問題也得到緩解。
1.3 提前導通控制方法
無刷直流電動機提前導通控制,克服了高速時轉矩下降問題,抑制了轉矩波動,是無刷直流電動機研究的一個熱點。提前導通角的計算是提前導通的關鍵所在,之前的研究將電機常工作于勻速狀態,根據經驗設置一個固定的提前導通角就能滿足運行需求。但現實應用中電機運行狀態變化頻繁,固定的提前導通角方法早已不能滿足性能需求。文獻[9]研究了基于速度改變提前角度控制的方法,提出合理的提前角度能小幅提升輸出功率,而提前角過大則會適得其反。提前控制方法很多,有各自的優缺點。
本文研究了一種提前導通控制方法。換相時分別檢測開通、關斷兩相反電動勢和電流的幅值,理想情況下兩相反電動勢幅值交點即換相開通時刻,兩相電流幅值交點時刻即換相時間的一半,在空間角度上兩個交點之差就是最優提前導通角。本文研究換相控制模塊實時檢測獲取換相提前角度應用到下一個換相周期來實現電機提前換相,具體過程如下。
三相星型6狀態工作方式無刷直流電動機一個旋轉周期反電動勢和電流波形如圖6所示,為了便于分析,假設反電動勢波形為理想梯形波。

圖6 未提前導通三相反電動勢和電流波形
本文研究的無刷直流電動機提前導通角在電機運行過程中檢測得到,不需通過計算換相時間,省去了復雜的計算過程。提前導通角取反電動勢交點到當前換相電流交點的角度差值,傳統無刷直流電動機控制方法電流總是滯后于反電動勢,所以檢測到的提前導通角大于零。
提前換相角的計算是提前導通的關鍵,電機運行狀態變化時換相提前角度也在不斷的變化,當電機平穩運行后換相提前角度趨于常值。換相控制的具體原理結合圖7和圖8分步驟進行說明。

圖7 換相控制原理圖

圖8 未提前波形時序圖
步驟1:如圖7所示,電流檢測接收三相電流輸入,對當前開通相和關斷相電流幅值進行比較。當兩相電流相等時輸出一個觸發信號,三相6狀態電機在一個旋轉周期360°內會有6個觸發信號,將6個信號異或成一個觸發信號a。觸發信號a控制電機換相時刻,同時也是采樣模塊的觸發信號。
步驟2:角度計算根據霍爾傳感器獲得三相位置信號,按照導通時電機處于0位置,旋轉一周360°回到原位置,形成一個從0~360°循環變化的角度信號,即信號b。
步驟3:根據觸發信號a對循環變化的角度信號b進行采樣,在一個旋轉周期內形成6個不同角度幅值的階梯信號c。信號c的6個幅值表示旋轉周期內6個電流交點的角度值。
步驟4:標準角度信號生成模塊根據霍爾信號生成換相標準角度信號d,標準的角度為0°(360°)、60°、120°、180°、240°和300°,即換相時刻反電動勢交點的角度值。
步驟5:信號d與信號c分別對應于當前換相周期標準換相角度和實際換相角度,通過計算得到當前周期換相提前角度,在下一換相周期時以該角度對電機進行提前導通。
控制系統在第一個換相周期不進行提前導通,在第二個周期內使用第一個周期內計算得到的提前導通角提前導通。因為當前的導通角是上一個周期的提前導通角,所以并不是最優提前導通角,此時電流波形仍然滯后于反電動勢波形,只是滯后的角度變小。當電機運行到第三個周期時,把前面兩個周期的提前導通角相加得到當前周期的提前導通角,則電流滯后于反電動勢的幅度進一步縮小,依次提前導通累加得到下一次的提前導通角,直到反電動勢波形的交點和電流交點重合。
在這過程中可能會出現電流波形超前反電動勢波形的情況,如圖9所示。
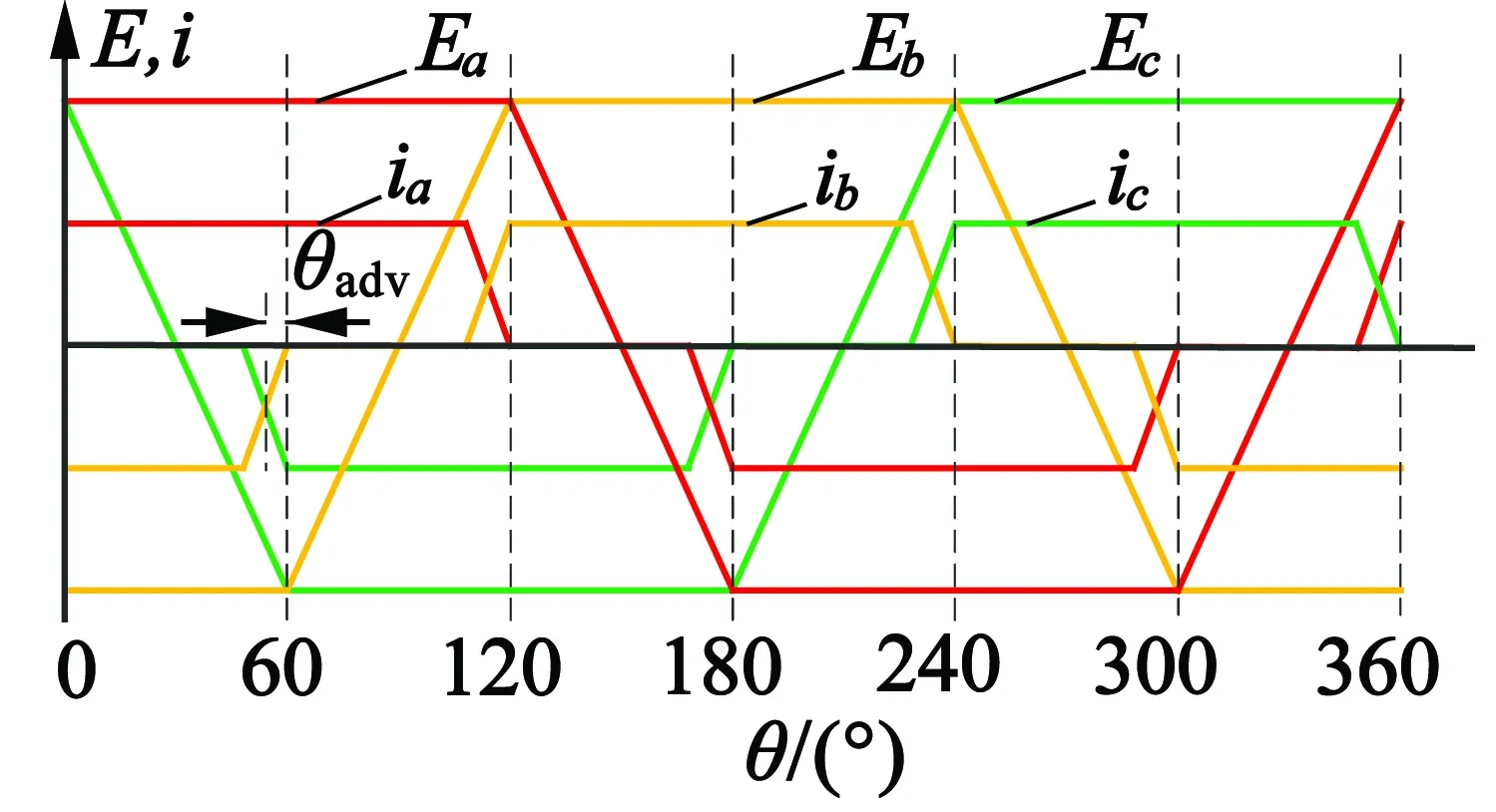
圖9 超幅提前導通三相反電動勢和電流波形
由圖9可見,電流變化時刻已經提前到反電動勢交點之前,提前角度過大,需要減小提前角度。開通相電流和關斷相電流相等時給出觸發信號,經過異或后a信號會有一個跳變,驅動采樣信號進行采樣,得到當前換相角度即信號c,同時標準角度也給出當前換相的標準角度d,兩信號的角度差值為正,下一個周期的提前導通角等于當前換相周期提前導通角與本次計算出的提前導通角之和,提前導通角將變小,在一個換相周期會減小提前換相角度,使電流的交點逐漸趨近于反電動勢交點。
圖10顯示了換相提前后反電動勢和電流波形交點重合情況,電機趨于一個穩態之后,電機的提前導通角也趨于一個穩態值,電流交點與反電動勢交點誤差可以忽略,反電動勢和電流波形交點重合。

圖10 反電動勢和電流交點重合波形圖
本文所研究的控制策略可以快速地取得控制效果,對于經常變化運行狀態的無刷直流電動機也能快速適應,達到預期控制效果。由于電機運行在高速時開通相和關斷相電流變化率并不相同,所以檢測出的提前導通角并不一定是最優提前導通角。根據文獻[2]中電流波形的中點與反電勢波形的中點重合時相電流與反電動勢的乘積最大,結合式(4)可知,此時電機的輸出轉矩最大。
1.4 PWM調制策略
控制策略中計算出的提前導通角是否為最優提前導通角取決于換相過程中開通相和關斷相電流斜率,如圖11所示。
圖11(a)中顯示當前換相周期內關斷相電流下降斜率等于開通相電流上升斜率,根據相關定理可知,θ1=θ2,則θ1為最優提前導通角。圖11(b)中顯示當前換相周期內關斷相電流下降斜率不等于開通相電流上升斜率,在這種情況下,一般θ1>θ2,則θ1不是最優提前導通角。

(a) 兩相電流斜率相等
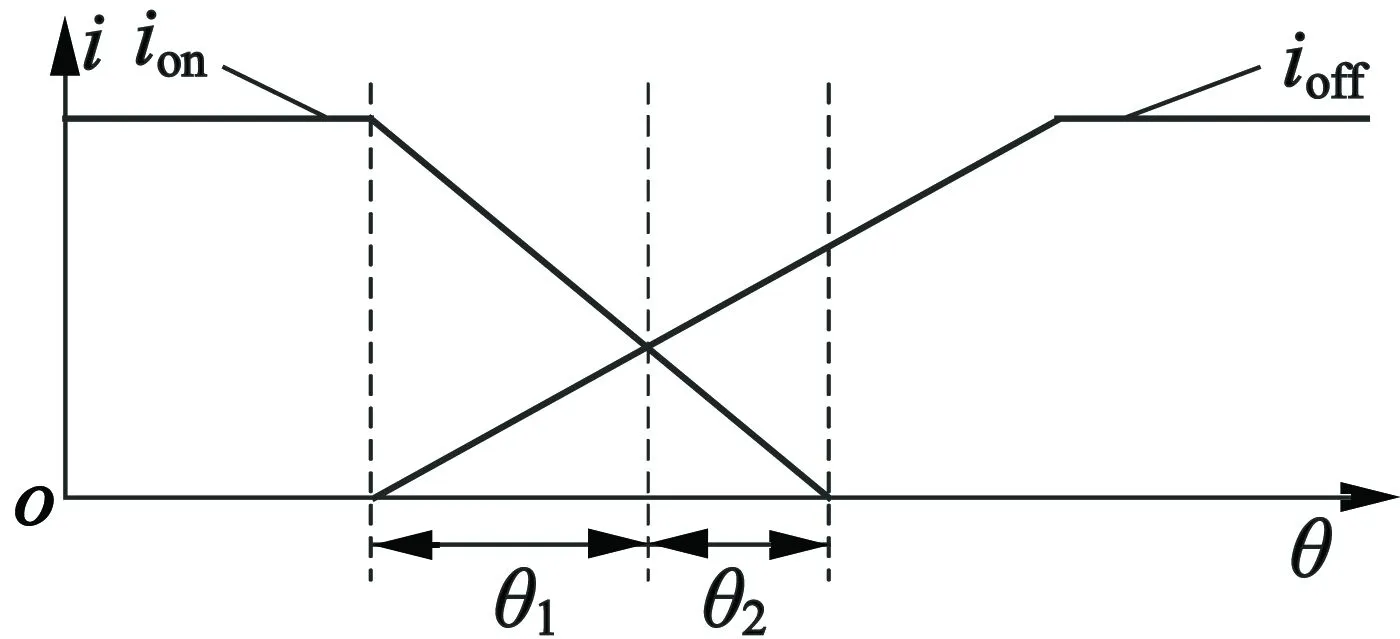
(b) 兩相電流斜率不等
為了達到高速狀態下電機開通相和關斷相電流斜率一致,采取文獻[4]中的PWM調制策略,在換相過程中,通過三相配合調制,將換相過程中的每個PWM周期分為3個功能區。通過計算給三相繞組中的每一相分配不同的調制占空比,使關斷相電流的下降速度和導通電流的上升速度在每個PWM周期保持相等。
2 仿真驗證及分析
為了驗證以上控制策略能抑制轉矩波動,克服高速時電機轉矩下降的問題,根據電機控制系統框圖建立MATLAB/Simulink仿真模型,對低轉矩波動無刷直流電動機提前導通PWM控制方法進行了驗證。仿真電機參數:相電阻R=0.33 Ω,相等效電感L=1 mH,母線電壓Udc=135 V,電機極對數p=4。
當電機工作于中低速時,反電動勢和電流都相對較小,電流變化較快,轉矩波動較小。仿真電機額定轉速1 000 r/min,負載5 N·m,圖12顯示了電機運行時反電動勢和電流波形。為了符合實際情況,反電動勢為非理想反電勢,開通相和關斷相電流幅值的交點滯后反電動勢交點,在換相過程中非換相電流有明顯的凹陷,電磁轉矩也隨之變小,換相轉矩波動將達到峰值。圖13顯示了該狀態下轉矩波形,導通過程中轉矩基本維持在5~6 N·m,換相過程轉矩下降嚴重,跌落到3.8 N·m,轉矩波動嚴重。

圖12 中低速下未提前導通反電動勢和電流波形圖
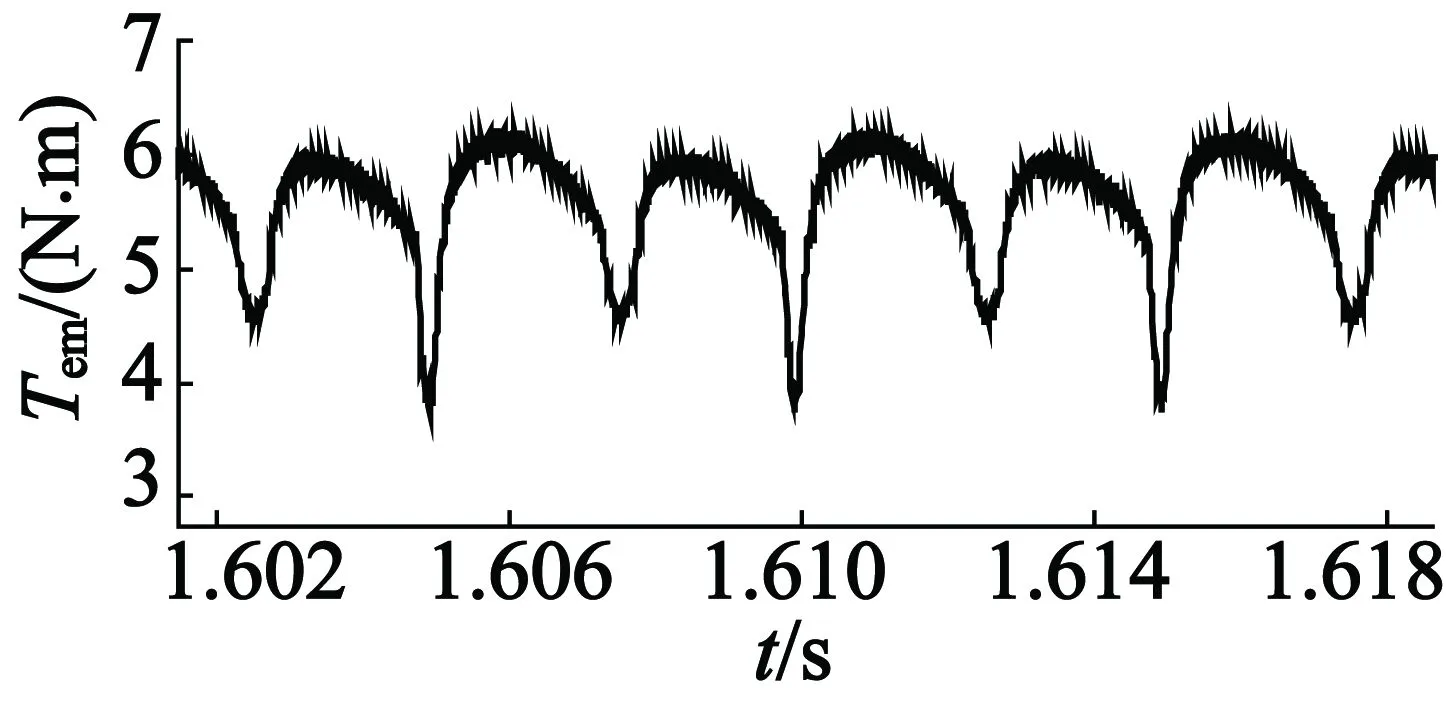
圖13 中低速下未提前導通轉矩波形圖
在相同運行狀態下,采用本文的控制策略,圖14顯示了提前導通下電機反電動勢和電流波形。電流變化速度加快,換相時間變小,開通相和關斷相電流交點與對應反電動勢交點重合,非換相相電流沒有明顯的凹陷。圖15顯示了該狀態下轉矩波形,導通過程中轉矩基本維持在5~6 N·m左右,換相過程轉矩沒有明顯跌落,轉矩波動抑制明顯。

圖14 中低速下提前導通反電動勢和電流波形圖

圖15 中低速下提前導通轉矩波形圖
實際應用中,無刷直流電動機工作在高速且高載的情況越來越多,針對上述情況仿真了電機轉速為2 500 r/min,負載5 N·m時運行結果。圖16顯示了傳統控制策略三相6狀態電機運行時反電動勢和電流波形。中高速時電機反電動勢和電流較大,電機換相時間變短,換相結束時開通相電流達不到峰值水平,嚴重滯后反電動勢波形,非換相相電流凹陷明顯。圖17顯示了該狀態下轉矩波形,導通過程中轉矩不能維持一定水平,波動幅度大。

圖16 高速下未提前導通反電動勢和電流波形圖

圖17 高速下未提前導通轉矩波形圖
同理,采用本文的控制策略后,圖18顯示了提前導通下電機反電動勢和電流波形。開通相電流上升速度加快,換相時間變短,開通相和關斷相電流交點與對應反電動勢交點重合,非換相相電流凹陷大幅度減小。圖19顯示了該狀態下轉矩波形,導通過程中轉矩基本維持在6 N·m左右,換相過程轉矩跌落不明顯,相對于傳統控制方式轉矩波動抑制明顯。

圖19 高速下提前導通轉矩波形圖
3 結 語
通過研究提前導通控制策略下無刷直流電動機波動情況,針對現有的提前導通控制方法,研究了低轉矩波動無刷直流電動機提前導通PWM控制方法,依據換相的實現方案進行仿真驗證,簡單有效控制無刷直流電動機提前導通,開通相和關斷相電流交點與反電動勢交點重合,轉矩波動抑制明顯,避免了高速段電機輸出轉矩下降問題。
[1] GU B G,PARK J S,CHOI J H,et al.Optimal lead angle calculation for brushless DC motor[C]//Power Electronics Conference.IEEE,2010:1416-1420.
[2] 羅宏浩,吳峻,趙宏濤,等.永磁無刷直流電機換相控制研究[J].中國電機工程學報,2008,28(24):108-112.
[3] 趙宏濤,吳峻.定子磁鏈提前換相增加直線永磁無刷直流電機的推力[J].中國電機工程學報,2011,31(3): 118-123.
[4] SHI J,LI T C.New method to eliminate commutation torque ripple of brushless DC motor with minimum commutation time[J].IEEE Transactions on Industrial Electronics,2013,60(6):2139-2146.
[5] SHINN M S,KUN L,JHIH S S,et al.A phase advanced commutation schene for IPM-BLDC motor drives[C]//Industrial Electronics and Applications.IEEE,2009:2010-2013.
[6] KANG B H,KIM C J,MOK H S,et al.Analysis of torque ripple in BLDC motor with commutation time[C]//International Symposium on Industrial Electronics.IEEE,2002:1044-1048.
[7] 譚建成.永磁無刷直流電機技術[M].北京:機械工業出版社,2011.
[8] 胡明樺,楊艷,郭鴻浩.一種改進的無刷直流電動機轉矩波動抑制策略[J].微特電機,2016,44(6):74-77.
[9] 胡勤豐,嚴仰光.永磁式雙凸極電機角度提前控制方式[J].電工技術學報,2005,20(9):13-18.
[10] 石堅,李鐵才.一種消除無刷直流電動機換相轉矩脈動的PWM調制策略[J].中國電機工程學報,2012,32(24):110-116.
APhaseAdvancedCommutationSchemewithLowTorqueRippleforBrushlessDCMotor
YANGYan,HUMing-hua,GUOHong-hao
(Nanjing University of Posts and Telecommunications,Nanjing 210023,China)
Abstract:The torque ripple limits the application of brushless DC motors in high precision and stability system. Some problems come out, such as the increasing torque ripple and the descending output torque descending can be caused by high rotated speed. With the analysis of torque ripple in the process of advanced commutation according to the equivalent model, a simple advanced commutation PWM modulation scheme was proposed. This controlling scheme made the current point of intersection ahead to the BEMF’s and leads the angle dynamically adjusted with the changing motor running state. A control method process was provided and the MATLAB/Simulink simulation module was built. The simulation results verified the effect of the controlling method that can suppress torque ripple and descending output torque.
Key words:brushless DC motor; output torque descending; advanced commutation; low torque ripple; adjust dynamically
中圖分類號:TM33
A
1004-7018(2018)05-0019-05
2017-01-13
國家自然科學基金青年科學基金項目(51507083)
