人工心臟單自由度懸浮控制仿真研究
2018-06-04 02:07:50孫傳余曹茂永李井凱
微特電機 2018年5期
關鍵詞:仿真
孫傳余,肖 楠,曹茂永,徐 特,李井凱
(山東科技大學, 青島 266590)
人工心臟單自由度懸浮控制仿真研究
孫傳余,肖 楠,曹茂永,徐 特,李井凱
(山東科技大學, 青島 266590)
摘 要:研究了一種新型的軸流式永磁偏置混合磁懸浮人工心臟結構。在該結構基礎上,進行Maxwell磁力仿真與分析,得出了磁懸浮轉子的狀態數學模型;設計系統控制電路,列勞斯判據表,得到系統控制穩定時的PID參數范圍;再通過MATLAB仿真,給出控制仿真結果。研究過程為磁懸浮人工心臟的穩定控制奠定了理論基礎。
關鍵詞:新型人工心臟;狀態模型;PID控制器;仿真
0 引 言
人工心臟是解決重癥心臟病患者的一種醫療手段,國外自20世紀50年代以來一直致力于人工心臟的開發研究。第一代人工心臟使用搏動式構造,具有體積大、機械磨損大、使用周期短等問題;第二代人工心臟主要特征為采用連續流血泵,依靠高速旋轉的葉輪來驅動血液單向流動,臨床應用中發現會誘發溶血、血栓等問題;第三代人工心臟的顯著特征是采用非接觸式懸浮技術,使葉輪與泵內其它部件無接觸,從而最大限度減少對血液細胞的損傷,有效解決了第二代人工心臟存在的問題[1]。
1 新型磁懸浮人工心臟
1.1 新型磁懸浮人工心臟的結構
為解決第二代人工心臟因摩擦帶來的溶血和血栓等問題,改進磁阻電機結構,提出新型的永磁偏置磁懸浮人工心臟結構[2-5],如圖1所示。定子部分包括:定子外殼,線圈繞組,定子上軸向磁化永磁體,定子下軸向磁化永磁體,下側輸入口,上側輸出口,定子鐵心等;轉子部分包括:轉軸,轉子鐵心,轉子上軸向磁化永磁體,轉子下軸向磁化永磁體等。定子鐵心呈12齒傾斜狀結構,轉子鐵心呈8齒傾斜狀結構,轉子鐵心上既無繞組也無永磁體,錐形分布的永磁體結構,可抵消磁懸浮轉子的自身重力。

(a) 主視圖
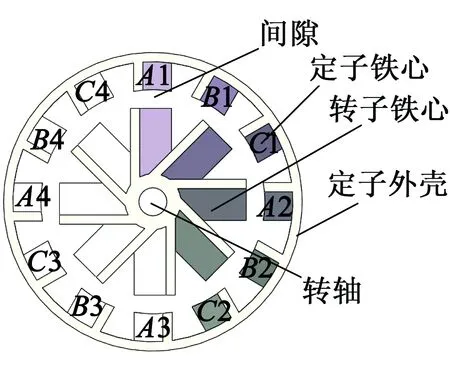
(b) A-A視圖
在此基礎上,線圈繞組A1-A2-A3-A4串聯構成A相旋轉力繞組,線圈繞組B1-B2-B3-B4串聯構成B相旋轉力繞組,線圈繞組C1,C2,C3,C4是4個獨立的C相懸浮力繞組。旋轉力繞組通過“磁阻最小”原理調節轉子旋轉速度,懸浮力繞組通過“電磁吸力”調節轉子徑向懸浮位移。磁懸浮轉子與定子之間沒有機械摩擦,并可實現徑向位移調節、切向旋轉速度調節、軸向血液驅動3項功能,具有體積小、結構簡單、性能可靠等優點,滿足移入人體的需要。
1.2 磁懸浮轉子的狀態數學模型
采用Maxwell仿真磁懸浮人工心臟C相懸浮力繞組,C1單相通電時的磁通密度云圖如圖2所示。
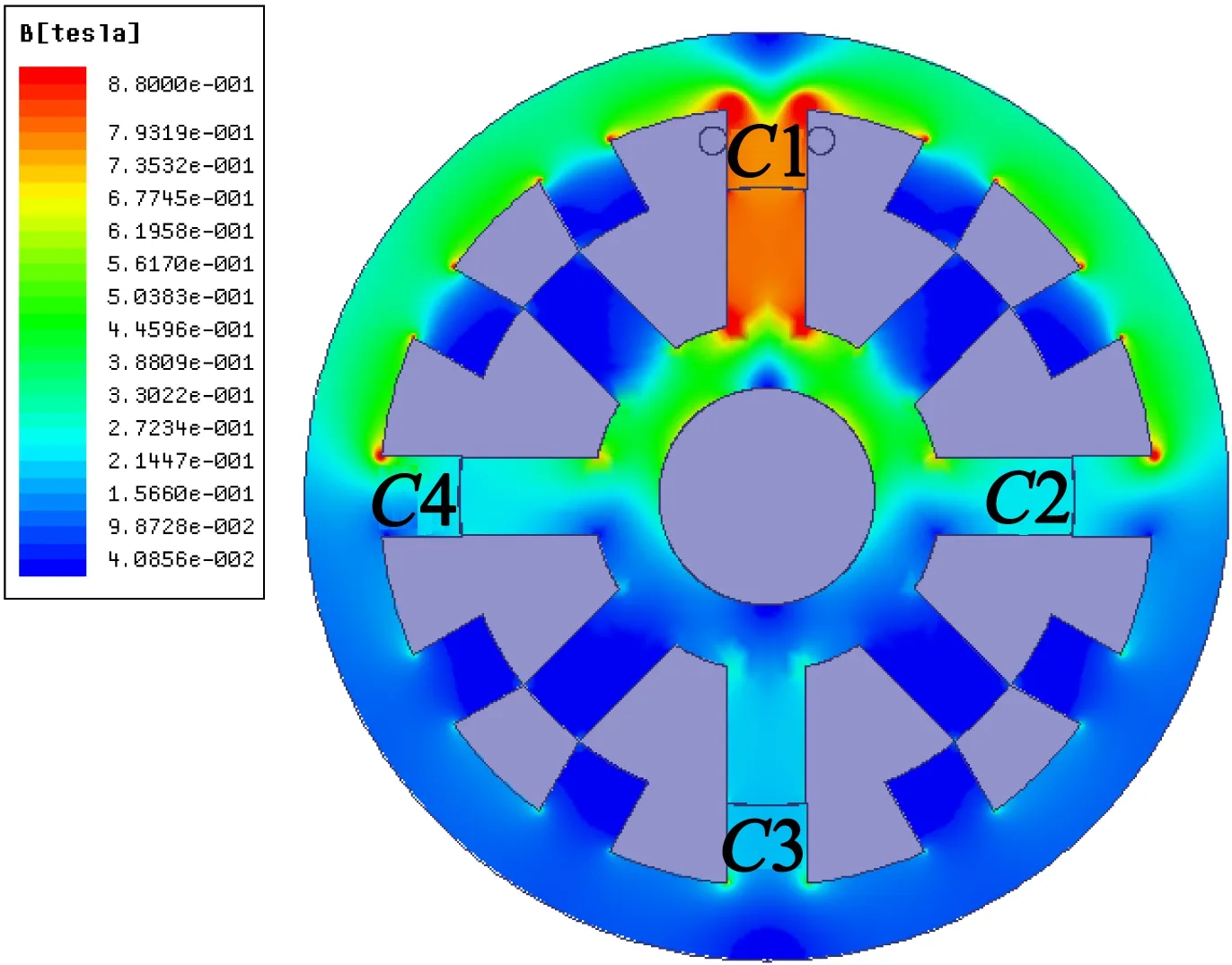
圖2 單相繞組通電時的磁通密度云圖
忽略漏磁,認為磁感應強度B和電磁力F滿足:
Bc1=3Bc3
(1)
Fc1=9Fc3
(2)
將C1繞組和C3繞組同時通以控制電流I,但兩者產生電磁場的方向相反,此時在C1,C3繞組氣隙處的電磁場合力變為[6-7]:
(3)
式中:μ0為真空磁導率;N為繞組匝數;I為控制電流;x為氣隙間距;As為氣隙橫截面積。
采用差分電流控制方式,定義靜態氣隙間距x0,靜態偏置電流I0,磁懸浮轉子質量為m,將式(3)在平衡點(x0,I0)進行線性化處理,并應用牛頓定律建立磁懸浮轉子的運動方程[8]:
(4)
將式(4)轉化為離散狀態的數學模型:
(5)
2 單自由度磁懸浮控制系統
2.1 單自由度懸浮控制電路
單自由度懸浮控制電路如圖3所示。當傳感器檢測到懸浮氣隙間距增大時,按圖3位置,會減小線圈繞組中的控制電流,以使磁懸浮轉子下移;反之,則增大線圈中的控制電流,以使磁懸浮轉子上移。PID控制器采用三星處理器S3C6410,采集電渦流傳感器檢測到的信號,運行內部PID算法,根據算法結果調整輸出信號的脈沖寬度PWM1和PWM2。光電耦合器件L217能隔離現場干擾及噪聲信號。發光管LED1和LED2是信號指示燈。P型晶體管FR5305和N型晶體管60N035控制線圈繞組中的電流大小,續流二極管D1及D2起保護作用。電渦流位移傳感器檢測磁懸浮轉子的徑向氣隙(位移)變化。運算放大器LM358構成同相比例放大電路,電阻R5能調節增益大小。
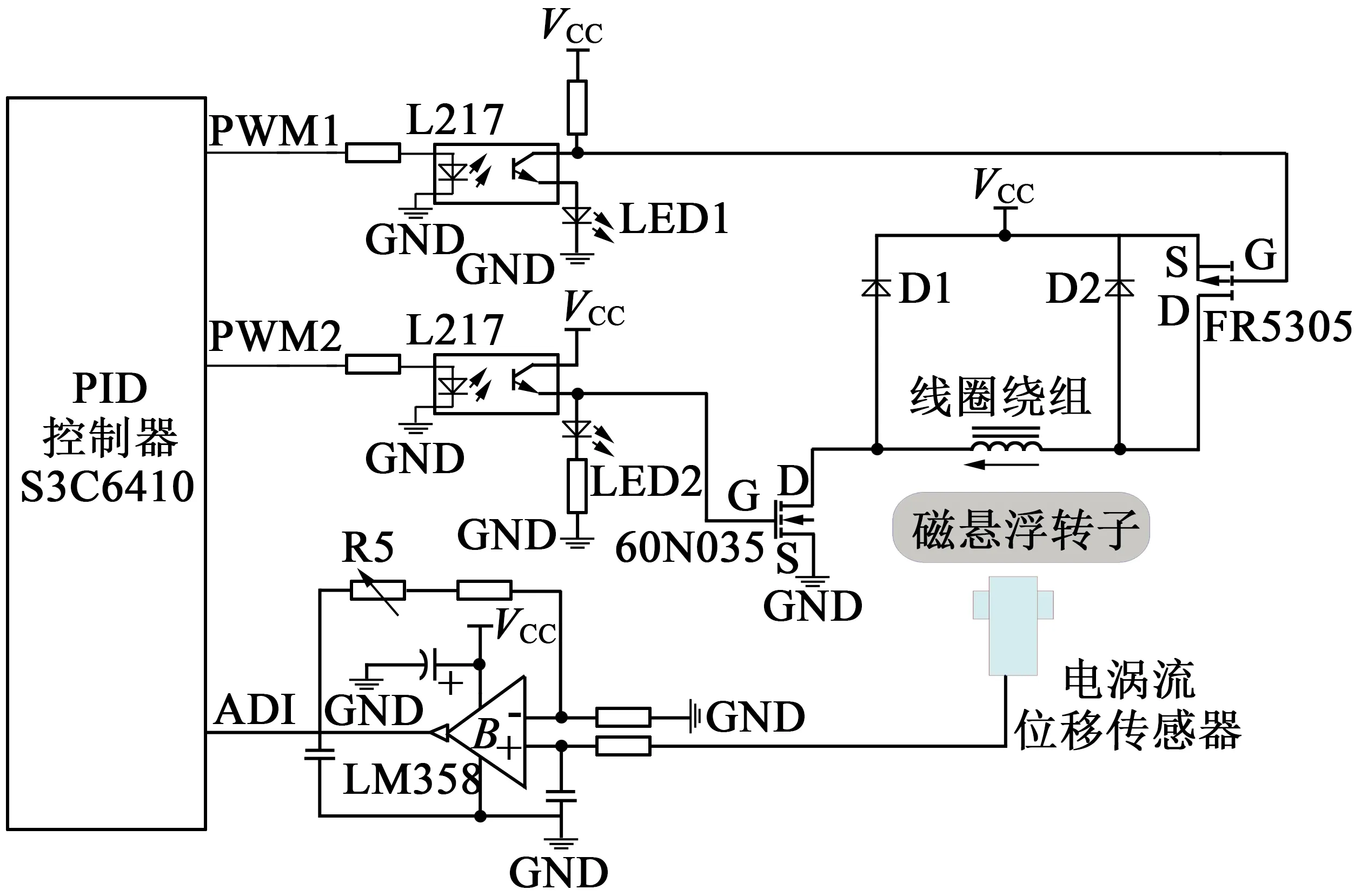
圖3 單自由度控制電路圖
人工心臟徑向懸浮控制由4個單自由度徑向控制電路構成,空間上互差90°。
2.2 單自由度懸浮控制仿真模型
根據單自由度懸浮控制電路的組成,使用MATLAB Simulink功能[9-10],建立單自由度懸浮控制的仿真模型,如圖4所示。參考量C對應磁懸浮轉子在平衡位置(靜態)時傳感器輸出的電壓;PID控制器代表嵌入式處理器S3C6410;功率放大器代表晶體管驅動線圈繞組中電流的過程;被控對象指磁懸浮轉子,其狀態方程描述了磁懸浮轉子的變化過程;電渦流位移傳感器檢測磁懸浮轉子的位移變化;示波器用來觀測閉環系統的階躍響應特性,以便判斷是否能達到穩定狀態。
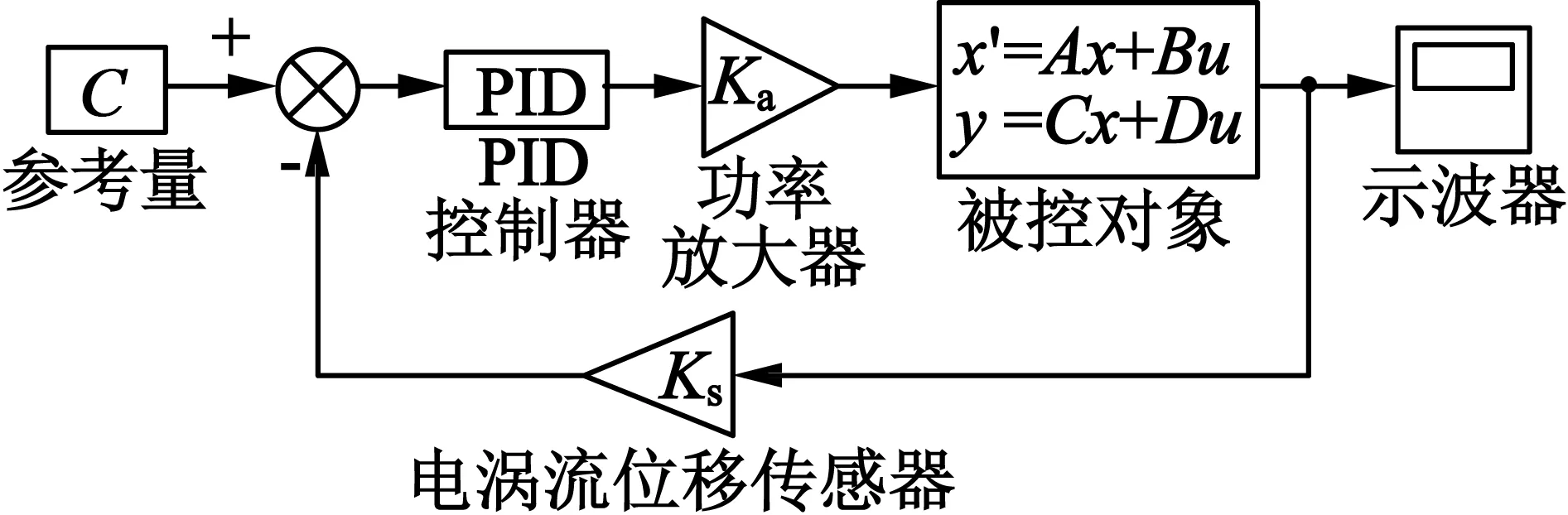
圖4 單自由度控制仿真模型
3 人工心臟參數及其仿真結果
3.1 新型人工心臟的設計參數
新型磁懸浮人工心臟的設計參數如表1所示。

表1 參數表
根據表1參數,可得到磁懸浮轉子的狀態數學模型中各矩陣系數:

C=[1 0]D=0
(6)
單自由度控制系統的閉環傳遞函數:
(7)
式中:s為拉普拉斯算子;kp為比例系數;ki為積分系數;kd為微分系數。
根據閉環傳遞函數的系統特征方程,列勞斯(Routh)判據表[11],如表2所示。
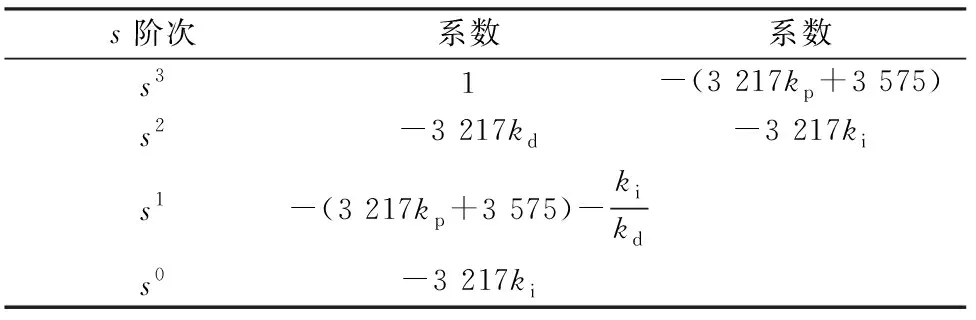
表2 勞斯判據表

3.2 PID控制仿真結果
根據穩定控制時的PID參數范圍,先取一組不穩定PID參數,kp=-1,ki=-0.1,kd=-0.01系統響應的曲線如圖5實線所示。可見曲線從0.05s后是發散不穩定的,一直沒有收斂。多次嘗試取得一組穩定PID參數,kp=-2,ki=-0.001,kd=-120系統響應的曲線如圖5虛線所示。可見系統在0.25s就穩定在平衡位置,即氣隙間距為1.0×10-3m處,穩態誤差≤1%,控制效果基本滿足要求。

圖5 系統響應曲線
4 結 語
本文研究了新型的永磁偏置磁懸浮人工心臟結構,其具有體積小、結構簡單、性能可靠等優點。建立人工心臟磁懸浮轉子的離散狀態數學模型,依靠勞斯判據求得實現系統穩定控制的PID參數范圍,由于超調量、穩定時間、穩態誤差等因素的存在,并不是所有滿足穩定控制條件的PID參數都是可用的。再通過MATLABSimulink功能給出具體的PID參數值,為工程實踐中設置PID參數提供了一種可行方法,減少了操作的盲目性,也為人工心臟的穩定控制奠定了理論基礎。
[1] 范灝.具有周向分布楔形間隙結構的液力懸浮血泵設計與研究[D].杭州:浙江大學,2014.
[2] 關勇,李紅偉,劉淑琴.軸流式磁懸浮人工心臟泵磁懸浮軸承系統設計[J].山東大學學報(工學版),2011,41(1):151-155.
[3]SUNJinji,ZHANGYin.Anovelintegratedstructurewitharadialdisplacementsensorandapermanentmagnetbiasedradialmagneticbearing[J].Sensors,2014,14(2):1950-1960.
[4] 趙旭升,鄧智泉,王曉琳,等.永磁偏置磁軸承的研究現狀及其發展[J].電工技術學報,2009,24(9):9-20.
[5] 孫傳余, 肖楠,李波,等.一種磁懸浮軸流式葉輪驅動裝置[P].中國,專利號201410550525.2,2014-10-17.
[6] 黃康,王勇,李露.磁軸承中的電磁力計算[J].軸承,2005(12):1-3.
[7] 侯二永,劉昆.混合磁軸承磁場與磁力解析計算[J].機械工程學報,2012,48(6):193-198.
[8] 胡業發,周祖徳,江征風.磁力軸承的基礎理論與應用[M].北京:機械工業出版社,2006.
[9] 朱熀秋,翟海龍.無軸承永磁同步電機控制系統設計與仿真[J].中國電機工程學報,2005,25(14):120-125.
[10]LIYong,LIWei,LUYongping.Computer-aidedsimulationanalysisofanovelstructurehybridmagneticbearing[J].IEEETransactionsonMagnetics,2008,44(10):2283-2287.
[11] 謝克明.自動控制原理(第2版)[M].北京:電子工業出版社,2009.
Single-FreedomLevitationControlSimulationofArtificialHeart
SUNChuan-yu,XIAONan,CAOMao-yong,XUTe,LIJing-kai
(Shandong University of Science and Technology,Shandong 266590,China)
Abstract:A new type maglev artificial heart with permanent magnet biased was studied. Based on this structure, simulation and analysis of electromagnetic force by Maxwell software were carried out; the state-space mathematical model of levitation rotor was got; then the control circuit was designed; the Routh Criterion table was listed; PID parameters were ranged under the condition of stability control; results were received through MATLAB simulation. Research process lays a theoretical foundation for artificial heart control system.
Key words:new artificial heart; state-space model; PID controller; simulation
中圖分類號:TM464
A
1004-7018(2018)05-0076-03
2018-04-10
山東省青島市應用基礎研究計劃基金項目(15-9-1-66-jch);山東省青島市博士后研究人員資助項目(01020120521)
作者簡介:孫傳余(1982—),男,講師,博士,碩導,主要從事磁懸浮人工心臟方面的研究。
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
