計算機視覺結合無人機技術實現火控系統
2018-06-07 02:37:30李紅燕
時代農機 2018年3期
關鍵詞:系統
李紅燕
(西北民族大學 電氣工程學院,甘肅 蘭州 730124)
飛行自動姿態控制技術在近幾年有著突飛猛進的變化。國內的無人機行業起步于初級航模,隨著對飛控算法的不斷研究完善,消費級無人機做為一個引爆點,在2013年后從媒體和資本市場的宣傳中徹底引爆,當拿著一架DJI Phantom3時,很難想象僅僅十年前還沒有一架這樣的飛行器飛在地球上,僅五年前這架飛行器上的絕大多數的技術難關還沒有被攻克,僅一年前這架飛行器上的還沒有智能跟隨和智能識別興趣點并確認環繞功能。一架無人飛行器濃縮了近二十年來,人類在系統控制論、空氣動力學、機器智能算法和微電子集成芯片制造技術的智慧結晶。
1 四旋翼自動瞄準火控系統
四旋翼自動瞄準火控系統的結構架構圖如圖1所示。
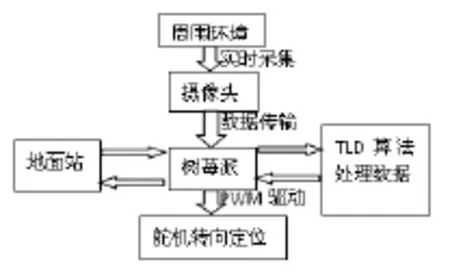
圖1 四旋翼自動瞄準火控系統的結構架構圖
采用ST公司生產的STM32F103RCT6作為飛控系統的主處理器。STM32系列基于裝為高性能、低成本、低功耗的嵌入式應用而設計的ARM Cortex-M3內核。該芯片主要負責采集傳感器檢測到的姿態角速率、俯仰角速率、橫滾角速率和偏航角速率、三軸的線加速度和航向信息并進行實時解算,同時接收來自火控系統部分的信號來實時調整飛行姿態和航向,根據檢測到的飛行信息,結合既定的控制發難,計算控制量,通過無線通信模塊與地面站進行數據采集和傳輸,實現接收控制命令改變飛行狀態和下傳飛行狀態數據以及視頻圖像。
2 硬件與軟件結合
2.1 硬件部分
(1)傳感器模塊。陀螺儀起到測量四旋翼飛行器的角速率的作用,加速度計在感應飛行器3個軸的線加速度中起作用。選用MPU6050集成模塊實現對3軸上的旋轉角度和重力加速度在3軸上的加速度分量。同時,慣性導航算法中,導航參數會隨著傳感器的測量誤差積累而發散,因而不能滿足長時間自主懸停的需要,故而將選用霍尼維爾公司的三軸式數字羅盤HMR3300模塊對慣性導航系統進行姿態校準。
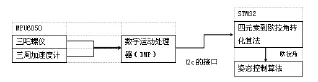
圖2
(2)電機控制模塊。采用PWM控制無刷直流電機的轉速,由于無刷直流電機是功率器件,因此需要大電流驅動,故而需要專門的控制驅動芯片,在文章中使用蘊G9110來控制和驅動無刷直流電機。
(3)無線通信模塊。無線通信模塊是四旋翼飛行器和地面站之間通信的唯一橋梁,因此要求通信質量必須要準確。在該文中,要求的無線傳輸距離為100m左右,故選用NordicV蘊SI公司推出的單片射頻收發器芯片nRF905。nRF905芯片工作在433MHz的ISM頻段,工作電壓為3.3V,使用SPI接口與STM32通信,配置和使用非常方便。此外,nRF905芯片功耗非常低,以-10dBm的輸出功率發射時電流只有11mA,接收信號時電流只有12.5mA,在100m之內傳輸穩定可靠。
(4)火控系統模塊。這部分模塊集成了攝像頭,主控芯片,射擊器,其中主控系統選用了基于ARM架構的樹莓派板載芯片作為主控芯片,其優點是可以在該芯片中燒錄蘊inux系統同時在安裝了攝像頭驅動之后可以實現對圖像的采集和處理,同時通過其上的無線網卡可以便捷的實現通過wifi來收發四旋翼的飛行數據和拍攝圖像,結合無線通信模塊可以實現擴展功能。
選用SG09舵機來控制火控系統射擊部分和攝像頭部分的朝向,由于以四旋翼飛行器為平臺,搭載火控系統。因此,這對火控系統的重量要求嚴格,SG09舵機重量僅僅為9g,扭矩性能強悍,功耗低,轉向精度準確,完全符合該項目的要求。通過加裝兩個舵機來實現再z軸上和x-y軸上的轉向。
攝像頭選用樹莓派定制攝像頭,擁有500萬像素,高曝光率,低功耗,和樹莓派主控芯片完美兼容,滿足火控系統自動瞄準時對外部環境的實時采集。
射擊部分使用微型電動PP彈連發仿真槍,其有效射程5米,可以在5m內擊中目標,在該項目中使用氣球作為假想象目標。
2.2 軟件部分
四旋翼飛行器控制系統軟件設計的總體目標是啟動飛行控制系統的各個功能模塊并使之能正常工作以及相互通信,使整體能夠按照既定的規劃實現飛行和精確打擊。由于四旋翼飛行器為六自由度的系統,而其控制量只有4個,這就意味著被控量之間存在耦合關系,所設計的控制算法應能夠對這種欠驅動系統足夠有效,用4個控制量對3個角位移量和3個線位移量進行穩態控制。本研究在得到四旋翼飛行器的動力學方程之后,適當地選取控制量,運用控制理論中經典的PID控制算法對飛行器系統進行控制。
飛行控制系統的中央控制模塊主要完成系統初始化、系統自檢、解算傳感器數據、導航信息解算、執行控制算法、計算并輸出控制量等功能。控制模塊選擇使用μC/OS-II管理控制任務的調度。μC/OS-II是一個專為嵌入式應用設計、基于優先級調度的搶占式實時操作系統內核,包含了任務調度、任務管理、時間管理/任務間通信與同步等功能。各任務之間通過信號量和消息隊列實現相互間的數據交換和同步。
火控系統的主控芯片主要負責在燒錄了raspbian系統時驅動各個模塊,使個攝像頭能夠對外界圖像實時采集并且對采集到的數據進行分析處理,根據處理出來的參數調整舵機定位裝置,使得射擊器能夠對準目標并且對目標實現打擊。在控制模塊中使用樹莓派板的蘊inux系統驅動各個模塊的工作,控制任務調度,并在其上配置Python環境,安裝開源圖像處理框架OpenCV,安裝開源框架MJPG-Streamer,把攝像頭掛載在樹莓派上。使用樹莓派的GPIO口,向舵機和射擊裝置發送PWM方波,使得舵機能夠調整射擊器和攝像頭的朝向使其能夠對準目標,并使射擊器能夠對目標進行精準打擊,同時將視頻流數據通過無線網卡連接wifi發送會地面站。
3 結語
順應時代科技的發展和市場的需求,當前時代是人工智能時代,是實現以機器代替人工的時代。四旋翼飛行器是人類自動化控制理論和人工智能所結合的產品,在其上搭載火控系統可以實現部分士兵防衛的功能,在四旋翼飛行器上搭載了兩個不同類型的主控芯片,并且在兩個主控中燒錄了不同的系統,在此情況下使兩個系統之間能夠協調工作。由于樹莓派上搭載了無線網卡使得可以實現將WIFI網絡作為信號傳輸媒介,最高傳輸速度可達到10Mbps,可以實現對攝像頭實時數據的傳輸,并且基本不用擔心網絡延遲的問題。自動瞄準火控系統,自主的識別打擊目標,并對該目標進行自動跟蹤瞄準,之后給予打擊。此設計的創新在于:使用完全無人控制方式實現四旋翼飛行器的飛行,以定點懸停為主,解放了人的控制;在無人的基礎上支持通過無線控制器對四旋翼飛機進行控制,多種控制方式并行,使系統更完美;在火控系統中使用了計算機視覺處理算法來實現對目標的自動瞄準;利用wifi網絡將四旋翼飛行器上的數據發送給地面站,使通信成本在大大降低的同時,還能保證通信效果;整個設計中運用了自動化控制理論,具有智能化。
[1] 馬玉真,陶立英,王新華.計算機視覺技術的應用[J].試驗技術與試驗機,2006,(1).
[2] 趙曉霞.計算機視覺技術在農業中的應用[J].科技情報開發與經濟,2004,(4).
[3] 張啟元.無人機航測技術在高寒地區基本農田測繪中的應用[J].青海大學學報(自然科學版),2014,(2).
[4] 鄭巖,譚慶昌,王樹范,等.車載火控系統自動跟蹤的卡爾曼濾波[J].紅外與激光工程,2010,(2).
[5] 陳希林,傅裕松,尉洵楷.機載光電瞄準系統的現狀及發展[J].紅外技術,2004,(2).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
