基于局部搜索OMP的網格失配STAP算法
2018-06-07 07:52:36李志匯張永順郭藝奪
系統工程與電子技術 2018年6期
李志匯, 張永順,2, 高 乾, 郭藝奪, 王 強, 劉 洋
(1. 空軍工程大學防空反導學院, 陜西 西安 710051; 2. 信息感知技術協同創新中心, 陜西 西安 710077;3. 空軍通信士官學校, 遼寧 大連 116600)
0 引 言
機載雷達在進行地面/海面弱小目標檢測時,面臨的強地/海雜波往往將微弱目標淹沒,嚴重影響了運動目標的檢測性能。空時自適應處理(space-time adaptive processing, STAP)對空時二維回波數據進行聯合處理,能夠有效地將雜波和目標在空時二維域中分離開來[1-2],顯著提升了機載雷達對慢速目標的檢測性能。STAP技術通常需要足夠多的獨立同分布(independent identically distributed, IID)訓練樣本來估計雜波協方差矩陣,然而在實際環境中,樣本非均勻導致難以獲得足夠多的IID樣本,從而導致STAP的性能嚴重下降[3]。近年來,不少學者將稀疏恢復(sparse recovery, SR)技術引入到STAP中,認為雜波在整個空時二維平面的分布是稀疏的[4],首先采用SR算法恢復出雜波的空時譜,然后采用恢復出的空時譜來構造雜波協方差矩陣,進而計算STAP權矢量,這類方法被稱為SR-STAP技術[5-8]。SR-STAP技術在不需要雜波先驗信息的情況下,使用非常少量的訓練樣本就能夠估計比較準確的雜波協方差矩陣。SR-STAP技術在構建STAP完備字典時一般假定離散化后的空時網格點與雜波脊完全對準,然而實際情況下,雜波散射點并不是恰好落在離散化的空時網格點上,從而導致雜波協方差矩陣的估計精度嚴重下降,這就是網格失配STAP問題,也可稱為基失配STAP問題。
當前,國內外眾多學者針對網格失配問題的研究,提出了許多有效的算法。文獻[9]指出存在網格失配時,SR算法的性能將嚴重下降。一種比較直接的方法是增加網格的數量來解決網格失配問題,但是網格數過于密集將會導致鄰近導向矢量比較高的相關性,另外將會導致計算復雜度顯著增加。文獻[10]提出了一種擾動正交匹配追蹤(perturbed orthogonal matching pursuit, POMP)的算法解決基失配問題,該方法能夠顯著降低重構誤差。針對波達方向(direction of arrival,DOA)估計中的網格失配問題[11-14],文獻[11]提出了一種稀疏貝葉斯參考(sparse Bayesian inference, SBI)算法,該算法首先建立了一階泰勒級數展開模型,然后從貝葉斯參考的角度,利用信號的拉普拉斯先驗提出了SBI算法來解決所建立的模型。文獻[12]建立了包含誤差參數的稀疏恢復DOA估計模型,提出了一種擾動稀疏貝葉斯學習(perturbed sparse Bayesian learning, PSBL)算法來解決網格失配問題。針對壓縮感知成像存在網格失配問題,文獻[15]提出一種基于貝葉斯壓縮感知的稀疏自聚焦(SAF-BCS)成像算法,該方法采用變分貝葉斯學習技術求解包含網格失配目標的稀疏像。文獻[16]從原子范數出發,綜述了無網格壓縮感知的理論框架和關鍵技術。雖然針對網格失配的問題研究較多,但是上述研究成果不能直接應用于網格失配STAP問題。針對網格失配STAP問題,文獻[17]采用字典學習方法來尋找最優基矩陣,提出了壓縮感知字典學習(CSDL)的方法,但是該方法僅適用于雜波線性分布于空時平面的情形。文獻[18]提出一種參數搜索正交匹配追蹤(orthogonal matching pursuit, OMP)的算法來解決SR-STAP中的基失配問題,該方法通過搜索最優參數來尋找與真實導向矢量相匹配的原子,但是該方法在每次迭代過程中都要采用梯度下降算法求解最優參數。
針對網格失配STAP問題,本文提出一種基于局部搜索(local search,LS)OMP STAP算法,稱為LS-OMP-STAP算法。該算法首先從全局STAP完備字典中選擇與雜波信號相匹配的全局網格點;然后以選出的全局網格點為中心,構建局部STAP完備字典,并從中選擇與雜波信號最匹配的局部網格點,進而獲得雜波的角度-多普勒像和修正的STAP字典,并用它們計算雜波的協方差矩陣。該算法能夠顯著降低網格失配帶來的STAP性能損失。
1 信號模型
1.1 雜波信號模型

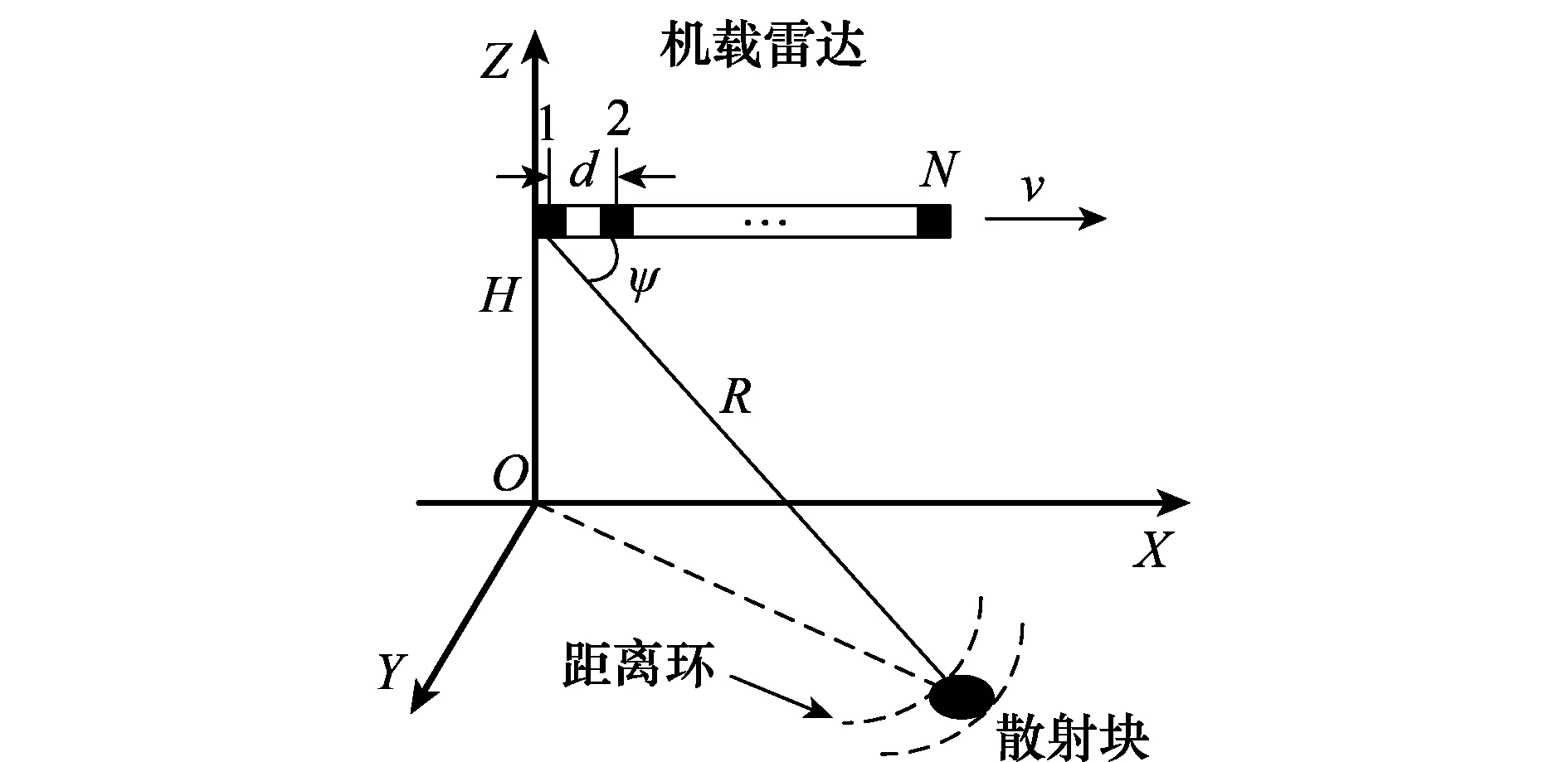
圖1 機載雷達陣列幾何關系圖Fig.1 Illustration of airborne radar array geometry
不考慮距離模糊,則一個距離門雷達接收的雜波加噪聲數據(稱作空時快拍數據)可以表示為
(1)
v(fdi,fsi)=vd(fdi)?vs(fsi)
(2)
式中,?表示Kronecker積;vd(fdi)和vs(fsi)分別表示時域導向矢量和空域導向矢量,可以表示為
vd(fdi)=[1,exp(j2πfdi),…,exp(j2π(K-1)fdi)]T
(3)
vs(fsi)=[1,exp(j2πfsi),…,exp(j2π(N-1)fsi)]T
(4)
將空時二維平面離散化為Ns×Nd個網格點,其中,Ns=ρsN,Nd=ρdK,并且ρs,ρd>1。則離散化空域頻率間隔和離散化時域頻率間隔可以分別表示為Δfs=1/Ns和Δfd=1/Nd。每個網格點對應一個空時導向矢量,假定所有的雜波散射塊都恰好落在離散化的空時網格點上,則式(1)可以表示為
x=Φγ+n
(5)
式中,Φ∈CNK×NsNd為STAP完備字典,由所有網格點對應的空時導向矢量構成,可以表示為
Φ=[v(fd1,fs1),v(fd1,fs2),…,v(fdNd,fsNs)]
(6)
γ=[γ1,1,γ1,2,…,γNd,Ns]T表示雜波的角度-多普勒像,其中的非零元素表示雜波塊在空時二維平面的位置。
1.2 網格失配STAP
實際情況下,在構造STAP完備字典時,并不能保證雜波散射塊恰好落在離散化的網格點上。因此,存在著網格失配問題。圖2給出了網格失配STAP的示意圖,整個空時二維平面離散化為很多細小的網格,每個網格點對應于一個空時導向矢量,所有的網格點對應的空時導向矢量構成了STAP完備字典。從圖2中可以看出,雜波脊并不能與網格點完全重合,即存在網格失配問題,利用存在失配的STAP完備字典恢復得到的雜波塊的位置和幅度存在偏差,進而導致所構造的雜波協方差矩陣與真實的雜波協方差矩陣存在偏差,從而影響SR-STAP技術的雜波抑制性能。
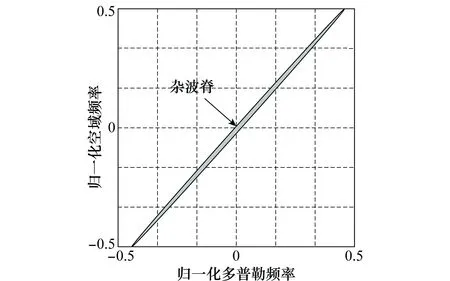
圖2 網格失配STAP示意圖Fig.2 Illustration of off-grid STAP
2 LS-OMP-STAP算法
2.1 LS-OMP-STAP算法的思想
LS-OMP-STAP算法的具體思路是:首先按照常規方式構造一個全局STAP字典ΦG(構造該字典時可以不用采用非常密集的網格),并在OMP算法的每次迭代中,挑選得到一個全局網格點,如圖3中紅色大圓點所示;然后再根據這個全局網格點的位置信息構造一個局部STAP字典ΦL(以挑選的全局網格點為中心,以離散化空域頻率間隔Δfs和時域頻率間隔Δfd為寬度設計大小為NL,s×NL,d的局部STAP字典,得到Q=NL,sNL,d個局部網格點,如圖3中藍色小圓點所示);最后,在該局部字典上再進行一次挑選,挑選出的局部網格點能夠與雜波塊更匹配,并用其修正全局STAP字典,進而得到雜波的角度多普勒像,并用獲得的更新后的STAP全局字典和雜波角度多普勒像來計算雜波加噪聲協方差矩陣。
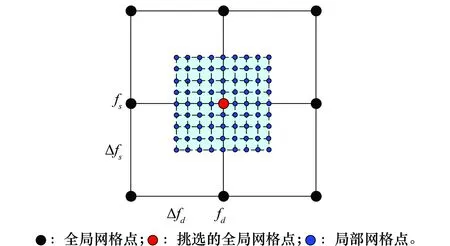
圖3 局部STAP字典設計示意圖Fig.3 Illustration of the design of local STAP dictionary
2.2 LS-OMP-STAP算法步驟
LS-OMP-STAP算法具體步驟如下:
輸入
全局STAP字典ΦG=[vG,1,vG,2,…,vG,P],其中P=NsNd,空時快拍數據x,局部STAP字典的大小Q,迭代終止限度σ或迭代次數K。
初始化
迭代
步驟1依據下式從ΦG中尋找與rk-1最相關的原子的索引,即



步驟5當‖rk‖2<σ或者k≤K時迭代終止,否則,k=k+1,轉到步驟1。
輸出
(7)
式中,(·)H表示共軛轉置;β為對角加載系數。
2.3 計算復雜度分析
LS-OMP-STAP算法的計算復雜度主要在步驟1,步驟2和步驟4。在第k次迭代中,步驟1需要的浮點操作次數(floating point operations, flops)為(2M-1)P,其中M=NK表示系統自由度;步驟2需要的flops次數為(2M-1)Q;步驟4計算雜波的角度-多普勒像,采用最小二乘法需要的flops次數為4kM,余量更新需要的flops次數為2kM[19]。假定算法迭代了T次數,則LS-OMP-STAP算法總的flops次數約為2M(P+Q)T+3MT2。同理,OMP-STAP算法與LS-OMP-STAP算法相比少了局部搜索步驟,即步驟2,當迭代次數為T時,OMP-STAP算法所需的總的flops次數為2MPT+3MT2。
3 仿真實驗分析
本節通過仿真試驗來證明本文的LS-OMP-STAP算法的有效性,機載正側視ULA的仿真參數如表1所示。
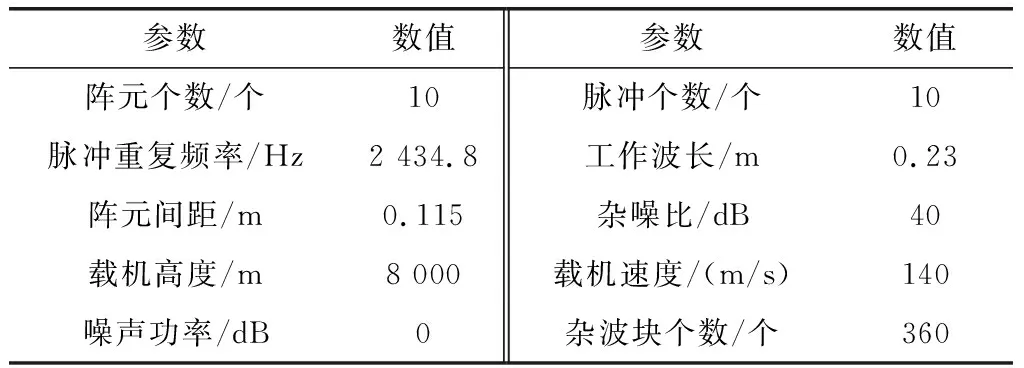
表1 機載ULA系統參數
圖4分別給出了隨機一次仿真中OMP-STAP算法和LS-OMP-STAP算法所挑選出的原子在空時二維平面的位置分布情況。其中OMP算法使用的STAP完備字典設置為ρs=4,ρd=4;LS-OMP-STAP算法使用的全局STAP字典設置為ρs=4,ρd=4,局部STAP字典大小設置為NL,s=10,NL,d=10。實驗中兩種算法都選取一個空時快拍數據,且迭代次數設定為K=19。從圖4中可以看出OMP-STAP算法挑選出的原子與雜波脊存在嚴重偏離,而LS-OMP-STAP算法挑選出的原子則與雜波脊距離非常接近。這是因為OMP-STAP算法使用的STAP完備字典存在比較嚴重的網格失配,而LS-OMP-STAP算法由于增加了局部搜索步驟,能夠在更精細的網格上搜索與雜波脊匹配的原子。需要說明的是,雖然圖4的結果僅是一次仿真所得,但該結論適用于任何一次仿真實驗。
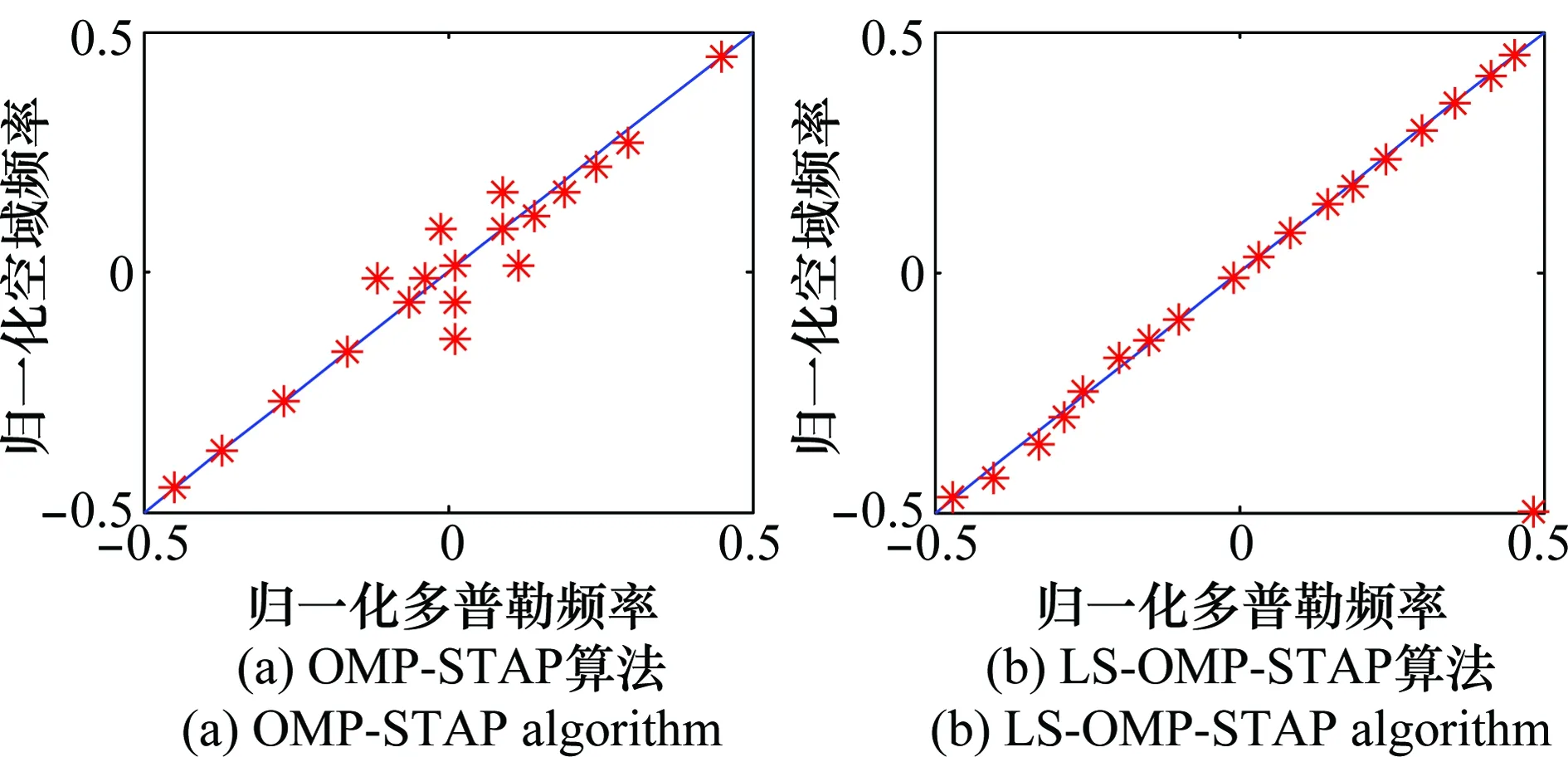
圖4 兩種算法挑選出的原子位置分布Fig.4 Location distribution of selected atoms for different algorithms
圖5(a)給出了理想情況下LS-OMP-STAP算法與兩種OMP-STAP算法的改善因子對比圖。圖5(b)給出了陣元誤差為5%情況下的改善因子對比圖。圖5中的結果通過200次蒙特卡羅仿真實驗得到,OMP1-STAP算法使用的STAP完備字典設置為ρs=4,ρd=4,OMP2-STAP算法使用的STAP完備字典設置為ρs=6,ρd=6。仿真實驗中所有算法都采用4個空時快拍數據,其他參數設置同上。從圖5(a)可以看出,3種算法在旁瓣雜波區的改善因子性能相近,但是在主瓣雜波區,OMP1-STAP和OMP2-STAP算法的改善因子的凹口展寬十分嚴重,而LS-OMP-STAP算法相比較來說凹口展寬較小。從圖5(b)可以看出,所有算法的性能在存在陣元誤差時都有所下降,在旁瓣雜波區,LS-OMP-STAP算法的性能跟OMP1-STAP和OMP2-STAP算法相比有所下降,但在主瓣雜波區,LS-OMP-STAP算法的性能仍然比OMP1-STAP和OMP2-STAP算法較好。說明LS-OMP-STAP算法增加的局部搜索步驟能夠在一定程度上降低網格失配帶來的性能損失。
圖6為所有算法的平均改善因子與空時快拍數的關系曲線。圖6(a)為理想情況下的仿真結果,圖6(b)為陣元誤差為5%時的仿真結果。其中平均改善因子定義為在整個歸一化多普勒頻率上改善因子的平均值,圖中結果經過了200次蒙特卡羅仿真實驗得到。從圖6(a)可以看出,隨著樣本數的增加,所有算法的平均改善因子性能稍微有所下降,這是由于雜波凹口稍微有所變寬導致的,通過對比可以看出,LS-OMP-STAP算法的平均改善因子要高于OMP1-STAP和OMP2-STAP算法。從圖6(b)中可以看出,存在陣元誤差時所有算法的平均改善因子都有一定程度的下降,其中LS-OMP-STAP算法的平均改善因子要優于OMP2-STAP算法,但其在樣本數少于12時則比OMP1-STAP算法較差,樣本數高于12時比OMP1-STAP算法較好。這進一步說明了LS-OMP-STAP算法能夠提升稀疏恢復STAP的性能,在理想條件下改善效果更加明顯。
在上述理想情況仿真條件下,通過分析可以得到LS-OMP-STAP算法所需總的flops次數約6 568 300,OMP1-STAP算法約為6 188 300,OMP2-STAP算法約為13 788 300。表2表示3種不同算法計算一次雜波角度-多普勒像的平均計算時間,所有的結果經過200次蒙特卡羅仿真實驗獲得,仿真實驗平臺在標準臺式計算機上完成,平臺參數為3.60 GHz I7-4790 CPU,內存為8 GB。從表2可以看出,LS-OMP-STAP算法的平均計算時間要比OMP1-STAP算法較大,而比OMP2-STAP算法的平均計算時間相對較小。說明LS-OMP-STAP算法在計算復雜度相對較低的同時能夠獲得較優的STAP性能。

圖6 不同算法的平均改善因子隨快拍數的變化Fig.6 Average IF of different algorithms against the snapshots

算法OMP1OMP2LS-OMP平均計算時間/s0.056 60.142 70.132 9
4 結 論
針對稀疏恢復STAP算法網格失配造成STAP性能下降的問題,本文提出了一種基于OMP算法的LS-OMP-STAP算法,該算法對OMP算法進行改進,增加了局部搜索步驟來選擇與雜波脊更匹配的原子來估計雜波的角度-多普勒像,避開了簡單的增加網格密度帶來的計算復雜度增加的問題。仿真實驗證明了本文所提的算法能夠選擇與雜波脊更接近的原子,明顯降低網格失配所帶來了STAP性能下降的問題,并且計算復雜度也相對較低。
參考文獻:
[1] WARD J. Space-time adaptive processing for airborne radar[R]. Technical Report 1015, Massachusetts: MIT Lincoln Laboratory, 1994.
[2] KLEMN R. Principles of sparse-time adaptive processing[M]. London: Institute of Electrical Engineering, 2006.
[3] MELVIN W L. Space-time adaptive radar performance in heterogeneous clutter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2000, 36 (2):621-633.
[4] YANG Z C, LI X, WANG H Q, et al. On clutter sparsity analysis in space-time adaptive processing airborne radar[J]. IEEE Geoscience Remote Sensing Letters, 2013, 10 (5): 1214-1218.
[5] SUN K, MENG H D, WANG Y, et al. Direct data domain STAP using sparse representation of clutter spectrum[J]. Signal Processing, 2011, 91 (9): 2222-2236.
[6] SUN K, MENG H D, LAPIERRE F D, et al. Registration-based compensation using sparse representation in conformal-array STAP[J]. Signal Processing. 2011, 91 (10) : 2268-2276.
[7] SEN S. Low-rank matrix decomposition and spatio-temporal sparse recovery for STAP radar[J]. IEEE Journal of Selected Topics in Signal Processing, 2015, 9 (8): 1510-1523.
[8] WANG Z T, XIE W C, DUAN K Q, et al. Clutter suppression algorithm based on fast converging sparse Bayesian learning for airborne radar[J]. Signal Processing, 2017, 130: 159-168.
[9] CHI Y, SCHARF L L, PEZESHKI A, et al. Sensitivity to basis mismatch in compressed sensing[J]. IEEE Trans.on Signal Processing, 2011, 59 (5): 2182-2195.
[10] TEKE O, GURBUZ A C, ARIKAN O, et al. Perturbed orthogonal matching pursuit[J]. IEEE Trans.on Signal Processing, 2013, 61 (24): 6220-6231.
[11] YANG Z, XIE L, ZHANG C. Off-grid direction of arrival estimation using sparse Bayesian inference[J]. IEEE Trans.on Signal Processing, 2013, 61 (1): 38-43.
[12] WU X H, ZHU W P, YAN J. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning[J]. IEEE Sensors Journal, 2016, 16 (7): 2004-2016.
[13] WEN C, XIE X M, SHI G M. Off-grid DOA estimation under nonuniform noise via variantional sparse Bayesian learning[J]. Signal Processing, 2017, 137: 69-79.
[14] LIU Q, SO H C, GU Y T. Off-grid DOA estimation with nonconvex regularization via joint sparse representation[J]. Signal Processing, 2017, 140: 171-176.
[15] 王天云, 陸新飛, 丁麗, 等. 基于貝葉斯壓縮感知的FD-MIMO雷達Off-Grid目標稀疏成像[J]. 電子學報, 2016, 44 (6): 1314-1321.
WANG T Y, LU X F, DING L, et al. Bayesian compressive sensing-based sparse imaging for off-grid target in frequency diverse MIMO radar[J]. Acta Electronica Sinica, 2016, 44 (6): 1314-1321.
[16] 陳栩彬,張雄偉,楊吉斌,等.如何解決基不匹配問題:從原子范數到無網格壓縮感知[J].自動化學報,2016,42(3):335-346.
CHEN X B, ZHANG X W, YANG J B, et al. How to overcome basis mismatch: from atomic norm to gridless compressive sensing[J]. Acta Automatica Sinica, 2016, 42 (3): 335-346.
[17] BAI L, ROY S, RANGASWAMY M. Compressive radar clutter subspace estimation using dictionary learning[C]∥Proc.of the IEEE Radar Conference, 2013: 1-6.
[18] BAI G T, TAO R, ZHAO J, et al. Parameter-searched OMP method for eliminating basis mismatch in space-time spectrum estimation[J]. Signal Processing, 2017, 138: 11-15.
[19] WANG J, KWON S, SHIM B.Generalized orthogonal match-ing pursuit[J].IEEE Trans.on Signal Processing,2012,60(12):6202-6216.
