基于SVM和Skyline查詢的空地一體化攻擊任務決策
2018-06-07 07:53:13李曦彤高曉光崔四杰
系統(tǒng)工程與電子技術 2018年6期
李 波, 李曦彤, 高曉光, 崔四杰
(西北工業(yè)大學電子信息學院, 陜西 西安 710129)
0 引 言
隨著未來空戰(zhàn)目標性能的不斷提高,空戰(zhàn)模式的不斷更新以及空地一體化綜合作戰(zhàn)理論的實現與發(fā)展,提高空戰(zhàn)武器裝備的毀傷效果和武器資源的利用效率日益關鍵。近年來,以美國為首的軍事科技發(fā)達國家在空戰(zhàn)導彈的技術研究方面不斷取得突破,導彈網絡化、多任務、多模制導等發(fā)展趨勢已經成為必然[1-2],而實現多任務導彈在空地一體化作戰(zhàn)中的攻擊任務最優(yōu)決策,是影響武器毀傷效果和利用率的關鍵,然而我國在相關方面可獲取的研究成果甚少。
在未來的信息化戰(zhàn)場中,一體化將成為對抗雙方的博弈形式的重要特征,一體化作戰(zhàn)的戰(zhàn)場空間包括陸、海、空、網絡等多維空間。而在空地一體化作戰(zhàn)過程中,導彈可實現對空任務與對地任務兩種任務類型的有效攻擊,因此需要實時地綜合整個戰(zhàn)場信息,進行導彈攻擊效能評估從而建立最優(yōu)的任務決策系統(tǒng),控制導彈有效攻擊目標。傳統(tǒng)的導彈任務決策系統(tǒng)主要基于目標威脅評估,空戰(zhàn)態(tài)勢評估,任務戰(zhàn)場價值等方面進行目標分配,常用算法有遺傳算法,蟻群算法,模擬退火,模糊邏輯算法等[3-4]。但這些方法在處理飛行環(huán)境的突發(fā)性變化問題時適應環(huán)境變化的能力較差,且多適用于對空或對地單種任務類型的目標分配,并不能很好地完成空地一體化綜合作戰(zhàn)中的雙任務導彈任務決策。
本文在空地一體化綜合作戰(zhàn)的基礎上,根據對導彈發(fā)射后攻擊效能的實時評估,建立了適用于多任務導彈的攻擊任務決策系統(tǒng)。當導彈不能有效命中原有目標但仍具有一定機動能力時,可以通過攻擊任務決策系統(tǒng)進行任務切換,將攻擊目標改變成當前其能夠命中毀傷的最優(yōu)目標。本文首先采用了基于支持向量機(support vector machine,SVM)理論的導彈空地任務類型決策算法,在樣本數量有限的情況下有效減小了訓練誤差。又建立了基于Skyline查詢算法的導彈目標任務決策方法,建立了級別不劣于關系模型,有效解決了導彈任務決策過程中處理高維數據時易出現的維數災難問題和多屬性決策中的完全補償問題,最終確定導彈的最優(yōu)攻擊目標。
1 空地一體化綜合作戰(zhàn)系統(tǒng)
目前傳統(tǒng)的空空導彈多采用典型的復合制導體制——“初制導+中制導+末制導”[5],為了有效提高武器資源利用率,空地一體化綜合作戰(zhàn)系統(tǒng)在傳統(tǒng)空空導彈典型流程的基礎上,引入了導彈在線評估系統(tǒng)和基于評估信息的導彈攻擊任務決策系統(tǒng),使導彈在不能命中原目標時具有動態(tài)切換對空或對地攻擊任務類型和攻擊目標的能力,從而使得作戰(zhàn)形式更加靈活高效。導彈空地一體化綜合作戰(zhàn)流程如圖1所示。
圖1 導彈空地一體化綜合系統(tǒng)流程圖Fig.1 Flowchart of the air-ground integrated system
由圖1可知導彈的空地一體化綜合作戰(zhàn)在導彈的中制導階段,進行了對導彈和目標狀態(tài)信息的實時在線評估,根據反饋的評估信息決策導彈是否進入任務切換階段;在任務切換階段,評估導彈性能和戰(zhàn)場各目標的相對態(tài)勢,決策導彈下一時刻所要攻擊的最優(yōu)目標,實現導彈的再次攻擊,從而提高導彈的作戰(zhàn)效能以贏得戰(zhàn)機。
2 導彈攻擊任務決策系統(tǒng)
在未來的空地一體化綜合作戰(zhàn)中,考慮到戰(zhàn)場復雜的電磁環(huán)境,目標的隱身能力和機動逃逸能力都有可能導致導彈發(fā)射后最終不能有效命中原有目標,而載機在導彈導引頭捕獲目標之前都需要對導彈進行指令制導,即有些情況下,載機是在對不能命中目標的導彈進行制導,從而浪費了時間,并延誤了戰(zhàn)機。因此,本文建立的導彈攻擊任務決策系統(tǒng)首先進行對導彈狀態(tài)的在線評估,即判斷導彈在當前飛行狀態(tài)下能否有效命中原目標,根據輸出的評估信息決定導彈是否進入攻擊任務切換決策階段,從而避免載機對導彈的無效指令制導時間,也增加了導彈再次攻擊目標的機會。
2.1 導彈狀態(tài)在線評估
面對瞬息萬變的戰(zhàn)場,為了對導彈的攻擊任務做出最佳決策,需要首先對導彈與戰(zhàn)場上各個目標進行實時的攻擊效能評估。鑒于機載計算機的計算性能有限,且對導彈性能的在線評估計算需要一定時間,本文采取了間隔性的周期評估以滿足實時性的要求,導彈狀態(tài)在線評估系統(tǒng)的基本流程如圖2所示。
圖2 導彈狀態(tài)在線評估系統(tǒng)流程圖Fig.2 Flowchart of the missile online assessment system
2.1.1 導彈攻擊效果評估
導彈攻擊效果在線評估的目的是實時地估計導彈發(fā)射后每刻的最終命中情況。本文采取導彈發(fā)射到進入末制導或者已放棄制導之間的時間段作為攻擊效能在線評估的時間段。
為了滿足戰(zhàn)場上信息獲取使用的實時性要求,首先以當前時刻的導彈、目標信息為初始態(tài),進行一次快速的彈道模擬,預測出導彈最終能否命中目標。若評估信息顯示導彈仍然能夠有效地命中當前目標,則導彈繼續(xù)攻擊該目標。此時輸出的評估信息為導引頭對目標的截獲概率P截獲和導彈對目標的殺傷概率P殺傷[6-9]。
一旦評估信息顯示中該導彈命中原目標失敗或攻擊原目標失敗,此次評估結束,返回此時的累計評估時間和評估時刻作為評估結果并進入導彈當前性能評估階段。
T_Fbegin=Tevalution(MissileBeginFailure)
(1)
T_Ftotal=n×T
(2)
式中,T_Fbegin為導彈開始命中失敗的評估時刻;T_Ftotal為導彈命中失敗的累積評估時間;T為評估周期;n為命中失敗的累計評估周期數。
2.1.2 導彈當前性能評估
導彈當前性能值的在線評估,是判定導彈當前狀態(tài)下是否具有再次攻擊能力的關鍵指標[10]。
導彈在飛行狀態(tài)下的性能與導彈已飛行時間t,導彈當前飛行速率v,導彈剩余燃料量等有關。選取導彈已飛行時間和導彈當前飛行速率作為導彈當前性能的評估指標參數,則導彈的當前性能值SM為
SM=SM(t,v)=a1Tt(t)+a2Tv(v)
(3)
式中,Tt(v),Tv(v)分別為導彈當前已飛行時間t、當前飛行速率v的函數;ai(i=1,2)是加權系數(ai>0且a1+a2=1)。由于相比于導彈當前飛行速度,導彈已飛行時間更能夠體現導彈性能的損耗及當前性能,故宜取a1>a2。導彈已飛行時間t越大,導彈的當前性能值SM越小;導彈當前飛行速率v越大,SM越大。綜合考慮導彈的推力作用時間tb、導彈的有效飛行時間ts以及導彈的最大飛行速率vmax,可得到Tt(v),Tv(v)的表達式分別為
(4)
(5)
式中,ξ(0<ξ<1)為權重系數。
選取S0作為判定導彈是否具有再次攻擊能力的當前性能值的臨界值,則SM≥S0時,導彈具有再次攻擊能力;否則,導彈不具有再次攻擊的能力,應當及時放棄對該導彈的制導進入下一階段的作戰(zhàn)。
2.1.3 彈目相對態(tài)勢評估
當判定導彈不能命中原目標且仍具有再次攻擊能力時,需要計算戰(zhàn)場上各目標與導彈之間的相對態(tài)勢關系,彈目之間的相對角度越小、相對速度越大、相對高度越小,則導彈攻擊目標時所需的機動能力越小,對導彈命中目標越有利。依據構造的態(tài)勢矩陣進行導彈攻擊任務決策,選取導彈下一刻的最佳攻擊目標。本文選取的導彈與目標之間關鍵相對態(tài)勢[10]包括:
(1) 彈目相對角度指數
(6)
式中,q為導彈速度矢量與目標線之間的方位角。
(2) 彈目相對速度指數
(7)
式中,v為導彈速率;vt為目標速率;vmax為導彈最大飛行速率;min(vt)為當前參與決策目標中最小速率。
(3) 彈目相對距離指數
(8)
式中,Dmax為導彈當前狀態(tài)下的最大攻擊距離。
(4) 彈目相對高度指數
(9)
式中,H為導彈高度;Ht為目標高度;Hmax為導彈的最大飛行發(fā)行高度;max(Ht)為當前所有參與決策目標中最大高度。
2.2 導彈攻擊任務切換決策
當評估信息顯示導彈不能有效命中原目標并有能力進行攻擊任務切換時,首先建立基于支持向量機原理的導彈空地任務類型切換決策算法,再根據在線態(tài)勢評估矩陣,利用Skyline查詢算法求解導彈攻擊的非劣解目標集合,并在非劣解目標集合中建立級別不劣于關系最終解得導彈下一時刻所應攻擊的最優(yōu)目標,本文建立的決策方法即克服了傳統(tǒng)攻擊任務決策在戰(zhàn)場決策中的延時問題,也保證了所求得的最優(yōu)目標一定是非劣解目標,更加具有合理性。
2.2.1 導彈空地任務決策
SVM是從線性可分情況下的最優(yōu)分類超平面發(fā)展出的一種常用的統(tǒng)計學習方法,在解決小樣本,非線性和高維數問題中相比于神經網絡等其他機器學習算法表現出許多特有優(yōu)勢[11-14]。
空地一體化作戰(zhàn)系統(tǒng)中導彈在下一時刻進行對空任務還是對地任務與導彈當前任務類型狀態(tài)(對空或對地)、導彈當前性能、導彈與戰(zhàn)場各目標之間的態(tài)勢有關。因此選取導彈當前任務類型{-1,1}{對空任務,對地任務}、導彈當前性能值、距離導彈最近的地面目標的彈目距離、距離導彈最近的空中目標的彈目距離作為訓練樣本的輸入項。為避免輸入變量差異較大,首先將訓練樣本數據中的輸入量進行歸一化。訓練樣本數據中的輸出量,即每個樣本相應的導彈空地任務類型可由專家指定或者經過實際作戰(zhàn)演練獲得。由于導彈的空地任務類型決策問題屬于高維的非線性問題,且為了克服樣本空間中可能存在的少數錯誤樣本帶來的誤差,本文引入松弛項的“軟間隔”非線性支持向量機(nonlinear support vector machines, NLSVM)[15],采用相對其他形式核函數具有更優(yōu)性能的高斯核函數(radial basis function, RBF)替代高維特征空間中的點積[11-16]。利用“軟間隔”NLSVM理論構建導彈空地任務切換決策問題的最優(yōu)超平面的詳細算法如表1所示。
表1 導彈空地任務切換決策算法
計算中拉格朗日乘子αi,αj的選擇原則是選取最大違反KKT條件[11]的變量對αi,αj,參數當所有的αi(i=1,2,…,l)滿足KKT條件時,循環(huán)終止,輸出訓練好的支持SVM相關參數。
2.2.2 導彈目標任務決策
在確定導彈下一時刻的空地任務類型后,就要根據態(tài)勢評估矩陣求解導彈下一時刻的最優(yōu)攻擊目標,首先需要求解彈目態(tài)勢各屬性集P={P1,P2,…,Pn}所對應的權重向量w=(w1,w2,…,wn)T,求解流程如圖3所示。由圖3可知,當判定CR>0.1時,則需要對矩陣B中的元素作調整,由于判斷矩陣B內絕大多數元素都能反映專家的決策意圖,因此對判斷矩陣元素調整的個數要盡可能少。本文所采用的權重向量計算方法在最大程度上保留了專家經驗。
圖3 權重向量求解流程Fig.3 Flowchart of updating the weight vector
Skyline查詢的基本思想就是在尋找數據集Γ中所有不被其他點支配的Skyline點的集合[17]。Syline查詢方法在處理高維數據時相有著良好的性質,可以克服維數災難和重要信息丟失等現象[18]。本文就是利用Skyline查詢的技術特點,首先在目標集合中選取非劣解目標集合,然后在非劣解目標集合中求解最優(yōu)目標,以分配給將要進行任務切換的導彈。
經典的Skyline查詢算法主要有:塊嵌套循環(huán)算法(BNL)、分治算法(D&C)等,文獻[19-20]在D&C算法的基礎上,建立了Skyline-樹的方法,讀入數據時動態(tài)的對數據進行劃分,只需與樹中和該數據具有相同特性的部分結點進行比較,以達到減少比較次數的效果。本文在文獻[20]的基礎上,修改Skyline-樹根節(jié)點的選取方法,防止根節(jié)點被之后讀入的數據支配,從而進一步減小比較次數。

步驟1選取根節(jié)點

(10)
步驟2劃分區(qū)域(子樹)
(11)
由于非劣解樹不會含有特征串為00…0和1…11的子樹。故所建立非劣解樹共有2n-2個子樹,它們的特征串范圍為[00…01,11…10]。
步驟3與根節(jié)點進行支配關系檢查
步驟4與對應子樹中的目標進行支配關系檢查

步驟5遍歷樹,刪除偽非劣解目標
隨后,記目標決策矩陣為A=[aij]m×n,(aij∈[0,1]),aij表示目標Xi對應于目標屬性指標Pj的指標值,則目標Xi的指標值向量為ai=(ai1,ai2,…,ain)。傳統(tǒng)的多屬性決策分析方法一般是將目標進行完全排序[21],然后選擇最優(yōu)目標,為了克服屬性間的完全補償關系導致的決策結果不夠合理,本文建立級別不劣于關系[22],引入一致指數和不一致指數,分別反映對“目標Xi不劣于目標Xj”的支持和反對程度。不一致指數可以理解為否決,意味著,如果目標Xi在屬性Pk的表現太差無法接受,那么該目標在其他屬性上的較好表現也無濟于事。下面給出由非劣解目標集合X求解最優(yōu)目標的具體算法步驟:
步驟1構造加權規(guī)范化矩陣V=[vij]m×n;
步驟2確定一致集C(Xi,Xj)和不一致集D(Xi,Xj);
步驟3計算一致指數c(Xi,Xj)和不一致指數d(Xi,Xj);
步驟4確定優(yōu)勢矩陣F={f(a,b)}和劣勢矩陣G={g(a,b)};
步驟5確定綜合優(yōu)勢判定矩陣E={e(a,b)};
步驟6確定目標之間的優(yōu)劣關系。
按上述步驟解得導彈非劣解目標集合X中不劣于其他目標的目標集合N,顯然,在N內部目標之間僅存在不可比關系。若N僅含有一個目標,則該目標即為導彈下一時刻的最優(yōu)攻擊目標;若N中元素個數大于1,則對N中的目標計算f(Xi)=ai×w即可確定最優(yōu)目標。
3 仿真與分析
3.1 仿真實驗
實驗條件:假設導彈發(fā)射10 s后,該導彈所攻擊的目標進行最大過載的“S”形機動逃逸以規(guī)避導彈,使得該導彈無法命中原定目標。導彈及其初始目標的初始化參數如表2所示。彈目態(tài)勢各屬性之間比重如表3所示。假設此時戰(zhàn)場與該導彈位置最近的空中目標和地面目標的位置和速度信息見表4所示。且假設導彈至多可進行一次任務切換。

表2 導彈及其初始目標的初始化參數
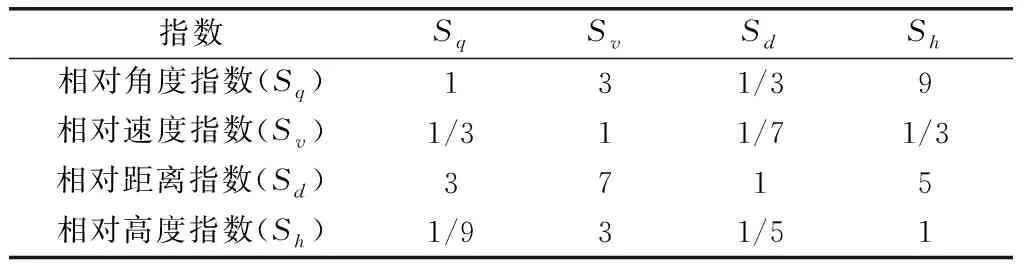
表3 彈目態(tài)勢各屬性之間比重

表4 導彈將切換任務時距導彈最近的空/地目標信息
其他相關參數如表5所示。
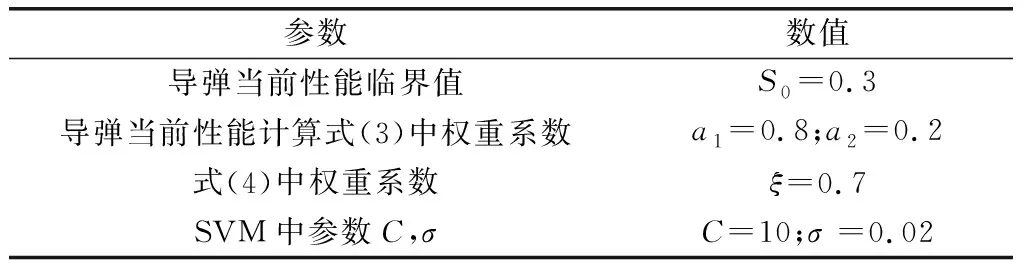
表5 其他相關參數
實驗1導彈狀態(tài)在線評估。
由表2可知導彈發(fā)射后飛行10 s時,導彈位置矢量為(8 728.2,5 000,2 244.6)m,速度矢量為(1 364.7,0,539.7)m/s,則導彈當前飛行速率為1 467.5m/s,根據式(3)~式(5)計算出導彈當前狀態(tài)下的性能值為SM=0.809 0>S0,故導彈具有再次攻擊能力。
實驗2導彈空地任務切換決策模型的支持向量機訓練與測試。
首先對SVM的訓練樣本和測試樣本中的數據進行預處理:設距導彈當前位置最近的地面目標的距離的取值范圍為minDG∈(0,50 km],距導彈當前位置最近的空中目標的距離的取值范圍為minDA∈(0,50 km],以此對minDG和minDA進行歸一化。然后,以表5中C,σ的取值進行支持向量機訓練,并用訓練好的支持向量機對測試樣本進行測試。選取30個測試樣本中部分測試結果如表6所示。
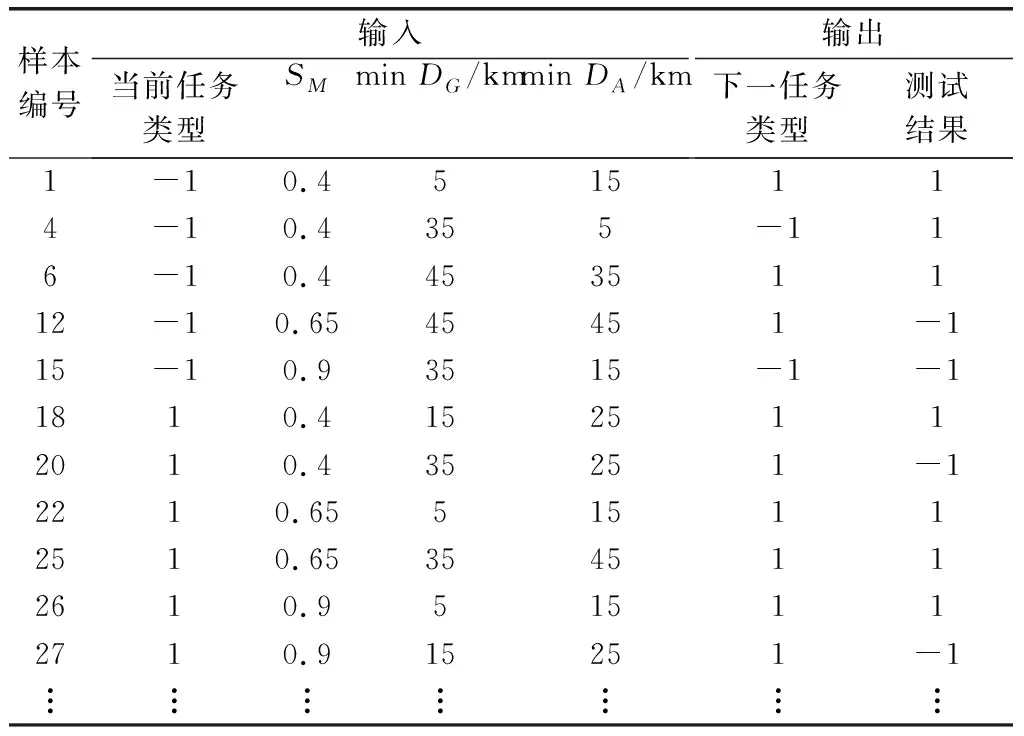
表6 SVM部分測試樣本
實驗3導彈空地一體化作戰(zhàn)攻擊任務決策。
由于導彈發(fā)射后不能有效命中初始攻擊目標,因此首先對導彈下一階段攻擊任務類型進行決策。由表4可知導彈發(fā)射后飛行10 s時,距導彈當前位置最近的地面目標的距離為minDG=24 402 m,距導彈當前位置最近的空中目標的距離為minDA=103 015 m。進行歸一化后值為0.488 0、0.206 3,將{-1,0.809 0,0.488 0,0.206 3}輸入到訓練好的支持向量機,輸出為-1。故導彈在下一時刻應當進行對空任務。
根據表3所提供的判斷矩陣計算出權重向量:
w=(0.194 6,0.066 4,0.584 9,0.154 1)T
(12)
隨后對導彈切換攻擊的目標進行決策選擇。設導彈當前狀態(tài)下的最大攻擊距離為50 km。根據導彈此時任務切換決策目標集合計算出各目標的彈目態(tài)勢集合。選取部分結果如表7所示。
利用Skyline計算原理求解非劣解目標編號集合X為{1,5,12,13,15,17,31,33,38,41,42,46,47}。由該非劣解目標集合和導彈目標任務切換決策模型的權重向量,求解導彈下一時刻的最優(yōu)攻擊目標。決策結果為:導彈下一時刻的最有攻擊目標為目標1。在時間為14.70 s時導彈導引頭截獲目標,在時間為18.80 s時,導彈命中目標。整個導彈空地一體化綜合作戰(zhàn)中的彈道曲線如圖4所示。
表7 部分彈目態(tài)勢集合
圖4 導彈空地一體化綜合作戰(zhàn)彈道曲線Fig.4 Trajectory curve of the air-ground integrated missile
3.2 實驗結果分析
由表6可知,30個測試樣本中僅有4個樣本的預測結果錯誤,故測試樣本的預測正確率為86.67%,且從統(tǒng)計學理論上講支持向量機的推廣能力十分優(yōu)秀。由此可驗證本文的導彈空地任務決策算法能夠有效準確地對導彈下一時刻應該進行對空任務或對地任務這一問題做出決策。
導彈導引頭截獲概率和導彈殺傷概率在線評估結果曲線如圖5所示。
圖5 導引頭截獲概率和導彈殺傷概率在線評估結果曲線Fig.5 Curve of the online assessment results of the intercept probability and kill probability
由圖5可知,導彈發(fā)射后,導彈在線評估系統(tǒng)開始進行周期性的攻擊效果評估,前10 s內由于目標未做機動,故導彈可有效殺傷目標且評估結果趨于穩(wěn)定。
導彈發(fā)射后飛行10 s時,目標進行逃逸機動,導彈實際上已不能有效命中殺傷原目標,此時導彈的在線評估結果為導引頭截獲概率和導彈殺傷概率皆為零,與實際情況一致,由此可驗證本文的導彈攻擊效果在線評估方案有效地解決了導彈發(fā)射后對目標攻擊效果的實時預測問題,為導彈下一階段的攻擊任務決策提供了基礎。
在導彈的攻擊效果在線評估結果為不能有效命中原目標時,對導彈當前性能進行評估,判斷導彈是否具有再次攻擊能力,本實驗依據導彈當前狀態(tài)判定該導彈具有再次攻擊能力,導彈最終命中切換后的目標的實驗結果也驗證了該判斷的正確性。
導彈過載曲線如圖6所示,由圖6可看出在導彈發(fā)射后10 s時,導彈過載急劇增大,這是由于導彈在此時進行目標切換,導彈需要較大的過載進行方向的調整。
圖6 導彈空地一體化綜合作戰(zhàn)導彈過載曲線Fig.6 Curve of the overload of the air-ground integrated missile
4 結 論
本文設計的導彈攻擊任務決策系統(tǒng)有效地解決了在空地一體化綜合作戰(zhàn)中多任務導彈的最優(yōu)攻擊任務決策問題。本文將攻擊任務決策分為導彈狀態(tài)評估和攻擊任務切換決策兩個階段,任務切換決策階段分為空地任務類型切換決策和目標任務切換決策兩部分完成。首先利用“軟間隔”NLSVM理論在小樣本的情況下低錯誤率的對下一時刻導彈的空/地任務類型進行預測,隨后根據導彈攻擊效果在線評估信息,利用Skyline查詢算法將決策空間縮小至非劣解目標集合,再利用級別不劣于關系克服了傳統(tǒng)多屬性決策存在的屬性之間的完全補償關系,設計了求解導彈最優(yōu)攻擊目標的決策算法。從而完整的解決了導彈攻擊過程中任務決策的問題。并經過仿真實驗驗證了所建立系統(tǒng)的良好性能。
參考文獻:
[1] 張冬青,蔣琪.世界導彈武器裝備與技術5年發(fā)展回顧與展望[J].戰(zhàn)術導彈技術, 2016(1): 1-8.
ZHANG D Q, JIANG Q. Reviews and outlooks of global missiles evolution in 5 years version[J].Tactical Missile Technology,2016(1):1-8.
[2] 周偉,董揚帆.2016年國外巡航導彈發(fā)展分析[J]. 戰(zhàn)術導彈技術, 2017(3): 12-17.
ZHOU W, DONG Y F. Development analysis of foreign cruise missile in 2016[J].Tactical Missile Technology,2017(3):12-17.
[3] ZHONG Y, YAO P, SUN Y, et al. Cooperative task allocation method of MCAV/UCAV formation[J]. Mathematical Problems in Engineering, 2016,2016(11): 1-9.
[4] 沈林成, 陳璟, 王楠. 飛行器任務規(guī)劃技術綜述[J]. 航空學報, 2014, 35(3): 593-606.
SHEN L C, CHEN J, WANG N. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593-606.
[5] SIOURIS G M.導彈制導與控制系統(tǒng)[M].張?zhí)旃?譯.北京:國防工業(yè)出版社, 2010.
SIOURIS G M. Missile guidance and control systems[M].ZHANG T G Trans.Beijing:National Defend Industry Press, 2010.
[6] 付昭旺, 于雷, 寇英信, 等. 導彈協(xié)同制導中末交接班目標截獲概率研究[J]. 彈道學報, 2012, 24(4): 31-36.
FU Z W, YU L, KOU Y X, et al. Target acquisition probability in midcourse and terminal guidance handing-off for cooperative guidance of missile[J].Journal of Ballistics,2012,24(4):31-36.
[7] 張大元, 雷虎民, 李海寧, 等. 復合制導導引頭開機截獲概率估算[J]. 固體火箭技術, 2014(2): 150-155.
ZHANG D Y, LEI H M, LI H N, et al. Estimate of startup target acquisition probability of seeker for missiles with composite guidance[J].Journal of Solid Rocket Technology,2014(2):150-155.
[8] 劉驍,唐勝景,朱大林,等.制導彈藥末段目標截獲概率研究[J]. 兵工學報, 2015, 36(2): 287-293.
LIU X, TANG S J, ZHU D L, et al. Research on target acquisition probability in the terminal guidance of guided munition[J]. Acta Armamentarii, 2015, 36(2): 287-293.
[9] 顧佼佼,劉衛(wèi)華,姜文志.基于攻擊區(qū)和殺傷概率的視距內空戰(zhàn)態(tài)勢評估[J].系統(tǒng)工程與電子技術,2015,37(6):1306-1312.
GU J J, LIU W H, JIANG W Z. WVR air combat situation assessment model based on weapon engagement zone and kill probability[J]. Systems of Engineering and Electronics,2015,37(6): 1306-1312.
[10] 李波,崔四杰,高曉光.空地一體化多任務導彈攻擊模式研究[J].電光與控制,2014,21(12):5-9, 56.
LI B, CUI S J, GAO X G. Research on attack mod of air-ground integrated multi-tasking missile[J]. Electronics Options & Control, 2014, 12: 5-9, 56.
[11] CRISTIANINI N,TAYLOR J S.支持向量機導論[M].李國正, 王猛, 曾華軍, 譯. 北京: 電子工業(yè)出版社, 2004.
CRISTIANINI N, TAYLOR J S. An introduction to support vector machines[M]. LI G Z, WANG M, CENG H J, Trans. Beijing: Publishing House of Electronics Industry, 2004.
[12] 丁世飛,齊丙娟,譚紅艷.支持向量機理論與算法研究綜述[J].電子科技大學學報,2011,40(1): 2-10.
DING S F, QI B J, TAN H Y. An overview on theory and algorithm of support vector machines[J]. Journal of University of Electronic Science and Technology of China,2011,40(1):2-10.
[13] AL-RAWABDEH W, DALALAH D. Predictive decision making under risk and uncertainty: a support vector machines model[J]. RAIRO-Operations Research, 2017, 51(3): 639-667.
[14] KHANNA D, SAHU R, BATHS V, et al. Comparative study of classification techniques (logistic regression and neural networks, SVM) to predict the prevalence of heart disease[J]. Survey of Ophthalmology, 2015, 38(3): 316-317.
[15] UMA S, SUGANTHI J. An intelligent and dynamic decision support system for nonlinear environments[J]. International Journal of Intelligent Information Technologies, 2017, 8(4): 43-61.
[16] 史峰,王輝.Matlab智能算法30個案例分離[M].北京:航空航天大學出版社,2011.
SHI F, WANG H. 30 cases for Matlab intelligence algorithms[M]. Beijing: Beihang University Press, 2011.
[17] BORZSONYI S, KOSSMANN D, STOCKER K. The skyline operator[C]∥Proc.of the 17th International Conference on Data, 2001: 421-430.
[18] LEE J, IM H, YOU G W. Optimizing skyline queries over incomplete data[J].Information Sciences,2016,s361-362:14-28.
[19] MA Z, SHENG L, XU Y, et al. QBSQ: a quad-tree based algorithm for skyline query[C]∥Proc.of the International Conference on Computer Science and Software Engineering, 2008: 435-437.
[20] 夏淑媛.一種基于Skyline Query的多目標優(yōu)化方法[D].蘭州:蘭州大學,2012.
XIA S Y. An approach for multi-object decision making based on skyline query[D]. Lanzhou: Lanzhou University, 2012.
[21] LIN B S, FAN Y B. An improved method for solving multi-attribute problem in transportation mode decision making process[J]. Advanced Materials Research, 2014, 1030-1032: 1961-1965.
[22] 劉新科, 王威, 譚樂祖. ELECTRE I多屬性評估方法在防空威脅評估中的應用[J]. 兵工自動化, 2011, 30(7): 19-22.
LIU X K, WANG W, TAN L Z. Application of ELECTREⅠmultiattribute block assessment in air defence threat evaluation[J]. Ordnance Industry Automation, 2011, 30(7): 19-22.
