乘用車H臂懸架C特性的穩(wěn)健性優(yōu)化設(shè)計(jì)
2018-06-13 08:36:28曹開斌廖抒華劉錦武
汽車零部件 2018年5期
關(guān)鍵詞:優(yōu)化
曹開斌, 廖抒華,劉錦武
(1.廣西科技大學(xué)汽車與交通學(xué)院,廣西柳州 545006;2.柳州孔輝汽車科技有限公司,廣西柳州 545006)
0 引言
懸架C特性是指當(dāng)輪胎受到地面的反作用側(cè)向力、縱向力和回正力矩時(shí),產(chǎn)生懸架彈性變形引起車輪定位參數(shù)隨力或力矩變化的規(guī)律[1-2]。現(xiàn)代大量汽車懸架采用橡膠襯套,而懸架C特性對(duì)整車操穩(wěn)性能有著重要影響[3]。文獻(xiàn)[4-5]中研究了襯套剛度與懸架柔性特性指標(biāo)之間的關(guān)系;文獻(xiàn)[6]中通過自適應(yīng)進(jìn)化算法對(duì)多連桿懸架K&C特性進(jìn)行優(yōu)化分析,改善了車輛的操縱穩(wěn)定性;文獻(xiàn)[7]中基于田口方法對(duì)麥弗遜懸架硬點(diǎn)進(jìn)行優(yōu)化,提高了懸架的運(yùn)動(dòng)學(xué)特性。
作者以某乘用車H臂多連桿懸架為研究對(duì)象,針對(duì)樣車在底盤調(diào)校階段所存在的問題,利用ADAMS建立懸架模型,并與Isight聯(lián)合仿真對(duì)襯套剛度進(jìn)行靈敏度分析,篩選設(shè)計(jì)變量。考慮到懸架安裝誤差影響,在田口方法的基礎(chǔ)上,采用AHP法確定目標(biāo)函數(shù),通過正交試驗(yàn)設(shè)計(jì)對(duì)H臂懸架進(jìn)行多目標(biāo)穩(wěn)健性優(yōu)化,探究一種可改善懸架性能且縮短調(diào)校周期的有效方法。
1 H臂懸架模型的建立與驗(yàn)證
1.1 懸架模型建立
以某乘用車的H臂多連桿后懸架作為分析對(duì)象,該懸架系統(tǒng)由束角控制臂、外傾控制臂、H型控制臂、減振器、彈簧和輪轂支架等結(jié)構(gòu)組成。通過ADAMS軟件建立懸架仿真模型,如圖1所示。模型中硬點(diǎn)和襯套剛度數(shù)值由樣車實(shí)測(cè)得到,用Fx、Fy表示襯套的徑向剛度,F(xiàn)z表示襯套的軸向剛度,Tx、Ty表示襯套繞徑向的扭轉(zhuǎn)剛度,Tz表示繞軸向的扭轉(zhuǎn)剛度。主要分析圖1中的前束控制臂襯套1、2,外傾控制臂襯套3、4,H型控制臂襯套5~8,對(duì)懸架C特性的影響。
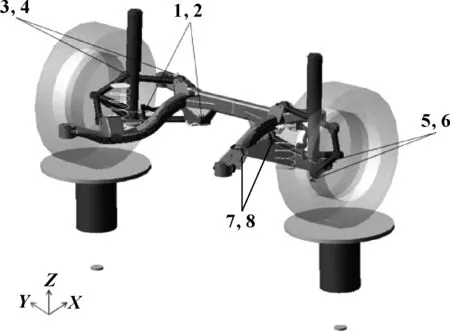
圖1 H臂懸架模型
1.2 懸架模型仿真與試驗(yàn)驗(yàn)證
通過對(duì)樣車進(jìn)行懸架K&C試驗(yàn)測(cè)試,將實(shí)測(cè)結(jié)果與仿真結(jié)果對(duì)比分析,驗(yàn)證所建模型的準(zhǔn)確性。圖2、3分別反映了側(cè)向力工況下前束角、輪距的變化。考慮到實(shí)車試驗(yàn)中襯套存在遲滯現(xiàn)象,仿真和試驗(yàn)分析結(jié)果有一定的偏差。由數(shù)據(jù)分析得出,仿真和試驗(yàn)中的前束角與側(cè)向力斜率均值偏差為6.12%,輪距變化與側(cè)向力斜率均值偏差為4.33%,說明所建模型的精準(zhǔn)性。對(duì)懸架其他工況進(jìn)行對(duì)比分析,結(jié)果均可達(dá)到滿意的精度。
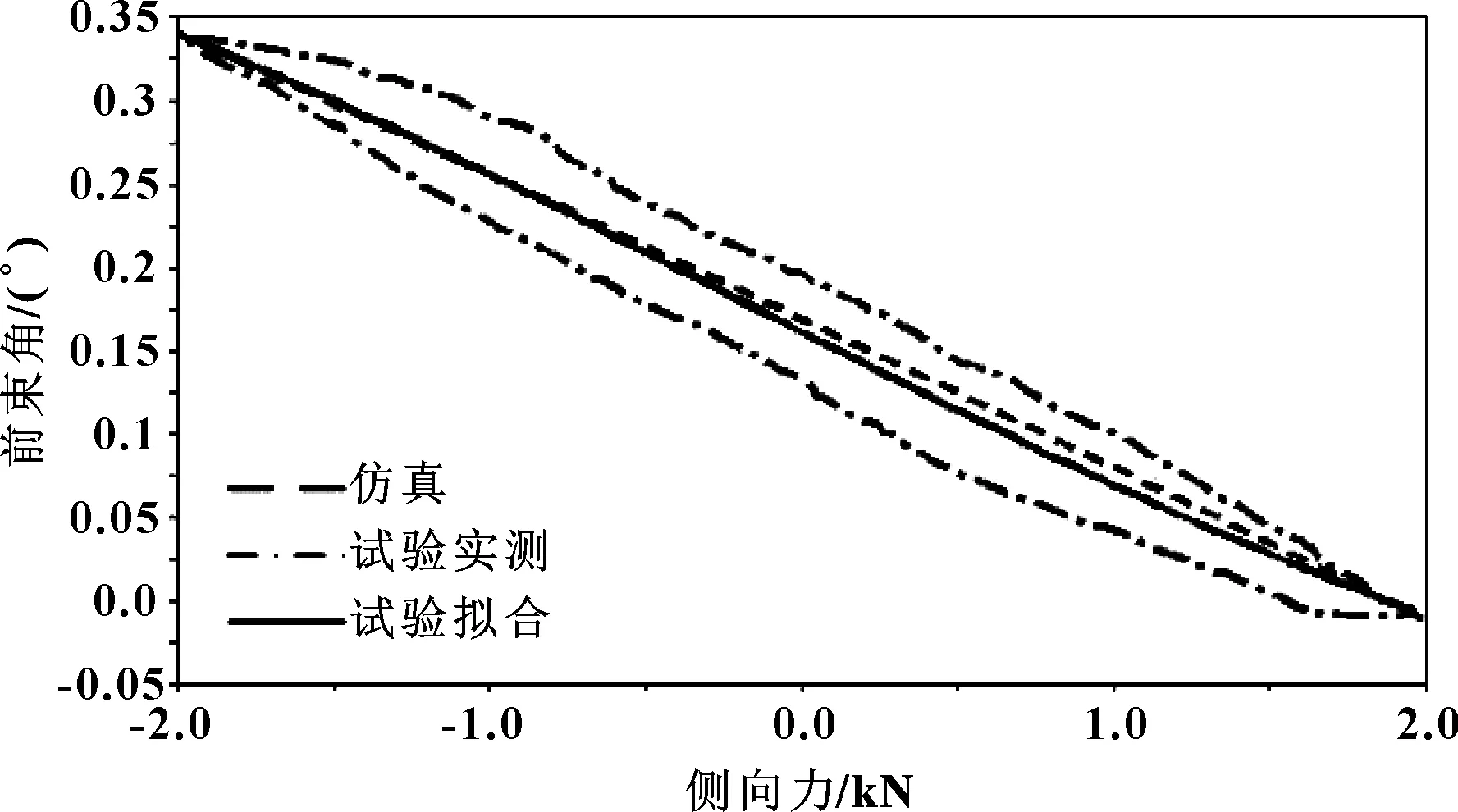
圖2 前束角變化

圖3 輪距變化
2 田口穩(wěn)健性設(shè)計(jì)基本理論
產(chǎn)品質(zhì)量穩(wěn)健性是指產(chǎn)品質(zhì)量特性抵抗不確定性干擾因素的能力,即其特性對(duì)設(shè)計(jì)參數(shù)和噪聲因素在一定范圍內(nèi)變化時(shí)的不敏感性[8-9]。當(dāng)產(chǎn)品質(zhì)量特性值與目標(biāo)值有偏差時(shí),就認(rèn)為有質(zhì)量損失。其質(zhì)量損失函數(shù)為:
L(y)=K(y-y0)
(1)
式中:y為產(chǎn)品質(zhì)量特性值;y0為質(zhì)量特性目標(biāo)值;K為質(zhì)量損失系數(shù)。
因y具有隨機(jī)性,假設(shè)y服從正態(tài)分布y~N(μ,σ2),衡量產(chǎn)品質(zhì)量的平均質(zhì)量損失函數(shù)為:
E{L(y)}=E[K(y-y0)2]=K(σ2+δ2)
(2)
式中:μ為質(zhì)量特性均值;σ2為質(zhì)量特性方差;δ為質(zhì)量特性絕對(duì)偏差。
穩(wěn)健性優(yōu)化設(shè)計(jì)要求均值盡可能達(dá)到目標(biāo)值,使δ最小;同時(shí)還要求由各種干擾因素引起波動(dòng)的方差σ2盡可能小。
田口法用信噪比(S/N)的大小衡量產(chǎn)品穩(wěn)健性,并將可控因子和噪聲因子通過正交試驗(yàn)設(shè)計(jì)方法與其相結(jié)合,找出最佳參數(shù)設(shè)計(jì)組合,使產(chǎn)品質(zhì)量特性更加穩(wěn)健。
對(duì)于懸架彈性運(yùn)動(dòng)學(xué)特性,其質(zhì)量特征要求:不取負(fù)值,越小越好,目標(biāo)值為0。這種質(zhì)量特征稱為望小特性,其平均質(zhì)量損失函數(shù)為:
(3)
式中:yi為懸架彈性運(yùn)動(dòng)學(xué)特性的質(zhì)量特性值;n為懸架彈性運(yùn)動(dòng)學(xué)特性的質(zhì)量特性個(gè)數(shù)。
信噪比定義為:
(4)
式中:αSN為信噪比值。
信噪比越大,說明質(zhì)量損失越小,產(chǎn)品質(zhì)量越好。
3 懸架C特性穩(wěn)健性設(shè)計(jì)
3.1 靈敏度分析確定設(shè)計(jì)變量
襯套剛度靈敏度分析通過Isight軟件和ADAMS軟件聯(lián)合仿真來完成。在Isight軟件中采用Latin Hypercube法進(jìn)行試驗(yàn)設(shè)計(jì),找出對(duì)懸架C特性影響顯著的因素。將襯套剛度作為變量,在同向回正力矩、同向側(cè)向力、同向縱向力3個(gè)工況下分析懸架C特性,以“前束角/回正力矩”“外傾角/側(cè)向力”“前束角/側(cè)向力”“輪心Y向位移/側(cè)向力”“輪心X向位移/縱向力” 和“前束角/縱向力”的斜率均值為響應(yīng)目標(biāo)。由于H臂懸架襯套較多,從8個(gè)襯套共48個(gè)參數(shù)中初步篩選出12個(gè)對(duì)懸架C特性影響較大的參數(shù);再對(duì)這12個(gè)參數(shù)進(jìn)行靈敏度分析,將靈敏度高于9%的參數(shù)變量視為影響因子,同時(shí)列出影響數(shù)量,結(jié)果參見表1。襯套剛度變化系數(shù)作為自變量,初始值為1,其變化域?yàn)閇0.5,2]。
變量定義:
T1為“前束角/回正力矩”的斜率均值;
T2為“外傾角/側(cè)向力”的斜率均值;
T3為“前束角/側(cè)向力”的斜率均值;
T4為“輪心Y向位移/側(cè)向力”的斜率均值;
T5為“輪心X向位移/縱向力”的斜率均值;
T6為“前束角/縱向力”的斜率均值;
F1為外傾控制臂內(nèi)點(diǎn)襯套Y向徑向剛度;
F2為外傾控制臂外點(diǎn)襯套Y向徑向剛度;
F3為H型控制臂前內(nèi)點(diǎn)襯套X向徑向剛度;
F4為H型控制臂前外點(diǎn)襯套X向徑向剛度;
F5為H型控制臂前外點(diǎn)襯套Y向徑向剛度;
F6為H型控制臂前外點(diǎn)襯套Z向徑向剛度;
F7為H型控制臂后內(nèi)點(diǎn)襯套Y向徑向剛度;
F8為H型控制臂后外點(diǎn)襯套X向徑向剛度;
F9為H型控制臂后外點(diǎn)襯套Y向徑向剛度;
F10為H型控制臂后外點(diǎn)襯套Z向徑向剛度;
F11為束角控制臂內(nèi)點(diǎn)襯套Y向徑向剛度;
F12為束角控制臂外點(diǎn)襯套Z向徑向剛度。
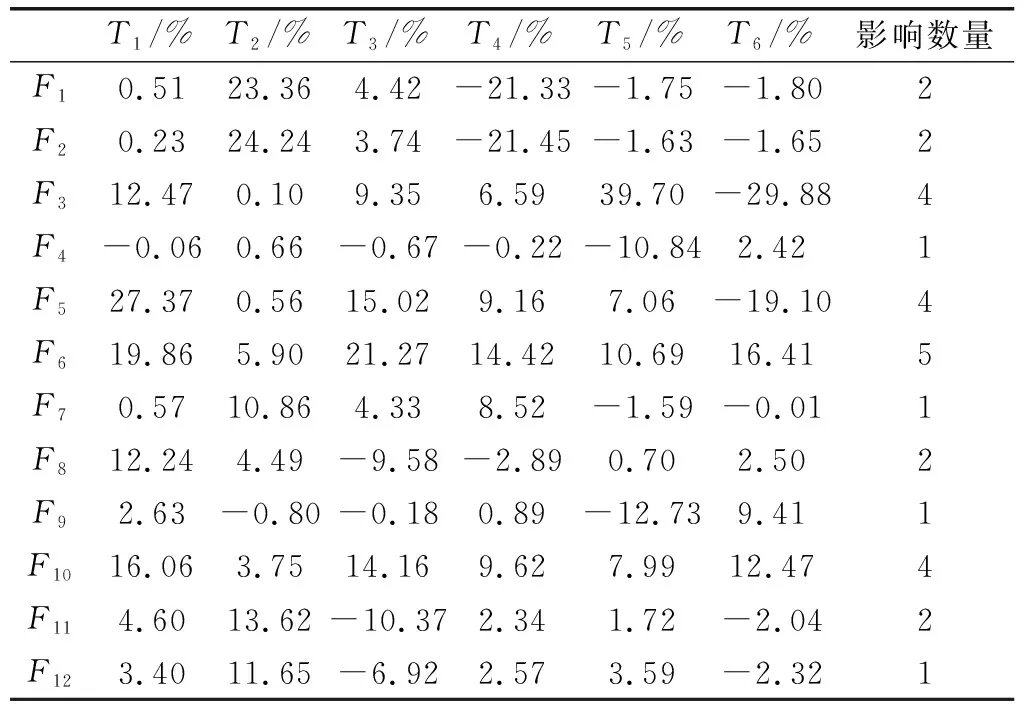
表1 懸架C特性靈敏度分析結(jié)果
根據(jù)表1,將影響數(shù)量不小于2的參數(shù)變量F1、F2、F3、F5、F6、F8、F10和F11作為控制因子;同時(shí)考慮到懸架安裝硬點(diǎn)誤差,把外傾控制臂內(nèi)點(diǎn)Y向坐標(biāo)值、減震器下點(diǎn)Z向坐標(biāo)值、減震器上點(diǎn)Z向坐標(biāo)值和束角控制臂內(nèi)點(diǎn)Y向坐標(biāo)值作為噪聲因子,懸架安裝硬點(diǎn)允許誤差取為±1 mm。
3.2 基于AHP法確定目標(biāo)函數(shù)
根據(jù)競(jìng)品車數(shù)據(jù)庫(kù)綜合考慮設(shè)定該H臂懸架C特性響應(yīng)的理想值范圍,如表2所示。
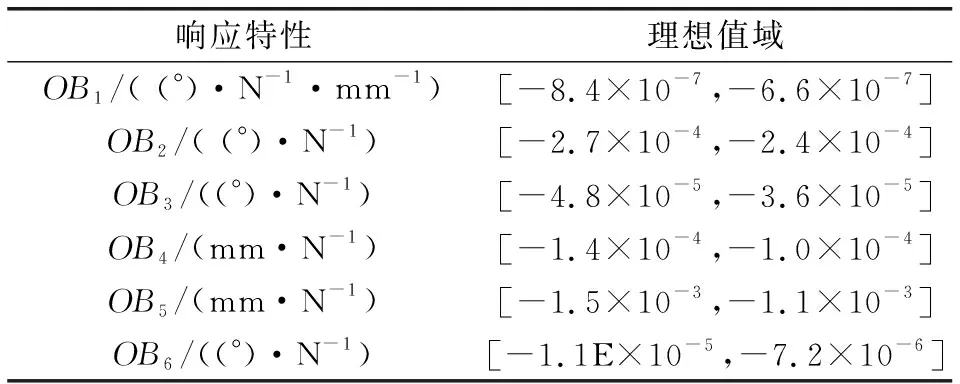
表2 響應(yīng)特性的理想值域
懸架C特性評(píng)價(jià)指標(biāo)確定:
(5)
式中:OBi為響應(yīng)特性量化后的理想值;Ti為懸架系統(tǒng)實(shí)時(shí)輸出響應(yīng)特性。
結(jié)合工程實(shí)踐經(jīng)驗(yàn),采用層次分析法(AHP)對(duì)6項(xiàng)特性按1-9比較尺度進(jìn)行兩兩比較,構(gòu)造判斷矩陣,計(jì)算各響應(yīng)對(duì)C特性的權(quán)重,并由判斷矩陣得出的最大特征根λmax。
從文獻(xiàn)[10]的平均隨機(jī)一致性指標(biāo)R.I(見表3)中找到相應(yīng)的平均隨機(jī)一致性指標(biāo);通過計(jì)算一致性指標(biāo)C.I=(λmax-n)/(n-1)及一致性比率C.R=C.I/R.I對(duì)判斷矩陣進(jìn)行可行性分析。當(dāng)C.R>0.1時(shí),應(yīng)修正判斷矩陣;當(dāng)C.R<0.1時(shí),可接受判斷矩陣的一致性,結(jié)果參見表4。

表3 1-9階正反矩陣計(jì)算1 000次

表4 成對(duì)比較矩陣及一致性檢驗(yàn)
懸架彈性運(yùn)動(dòng)學(xué)特性目標(biāo)函數(shù):
(6)
式中:ωi為各響應(yīng)特性的權(quán)重。
根據(jù)工程經(jīng)驗(yàn)結(jié)合K&C試驗(yàn)數(shù)據(jù)分析,目標(biāo)函數(shù)響應(yīng)值越小越好。
3.3 基于田口法的穩(wěn)健性優(yōu)化設(shè)計(jì)
根據(jù)上述已確定的可控因子和噪聲因子,不考慮參數(shù)間的交互作用,進(jìn)行正交實(shí)驗(yàn)設(shè)計(jì)。控制因子試驗(yàn)采用正交表L32(38),噪聲因子采用正交表L8(24),總試驗(yàn)次數(shù)達(dá)256次。由于一次田口方法得到的因素水平可能與最優(yōu)值存在較大差距,不能滿足精度要求。為提高因素的精度范圍,第二次田口因素水平基于第一次田口分析的結(jié)果進(jìn)行選擇,并再次進(jìn)行試驗(yàn)分析,得到該試驗(yàn)設(shè)計(jì)的Pareto解集,如圖4所示。

圖4 Pareto解集
從圖4可以看出:試驗(yàn)設(shè)計(jì)后在同向回正力矩、同向側(cè)向力、同向縱向力3個(gè)工況下的“前束角/回轉(zhuǎn)力矩”斜率均值范圍為[-1.067×10-6,-6.569×10-7],“外傾角/側(cè)向力” 斜率均值范圍為[-2.945×10-4,-2.329×10-4],“前束角/側(cè)向力” 斜率均值范圍為[-9.879×10-5,-3.508×10-5],“輪心Y向位移/側(cè)向力” 斜率均值范圍為[-2.529×10-4,-8.158×10-5], “輪心X向位移/縱向力” 斜率均值范圍為[-0.002,-0.001] ,“前束角/縱向力” 斜率均值范圍為[-4.607×10-5,4.296×10-5]。與表2進(jìn)行對(duì)比,該P(yáng)areto解集已完全覆蓋響應(yīng)特性理想?yún)^(qū)間。
同時(shí)得到目標(biāo)函數(shù)均值主效應(yīng)和信噪比主效應(yīng)如圖5、圖6所示。響應(yīng)值越小,懸架C特性越好;信噪比越大,懸架性能穩(wěn)健性越高。
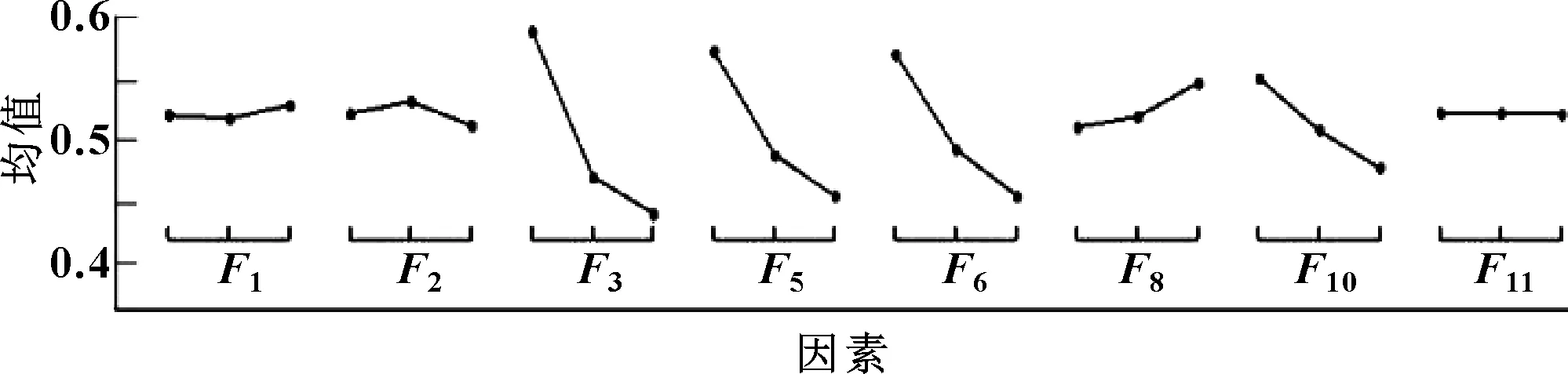
圖5 目標(biāo)函數(shù)均值主效應(yīng)圖
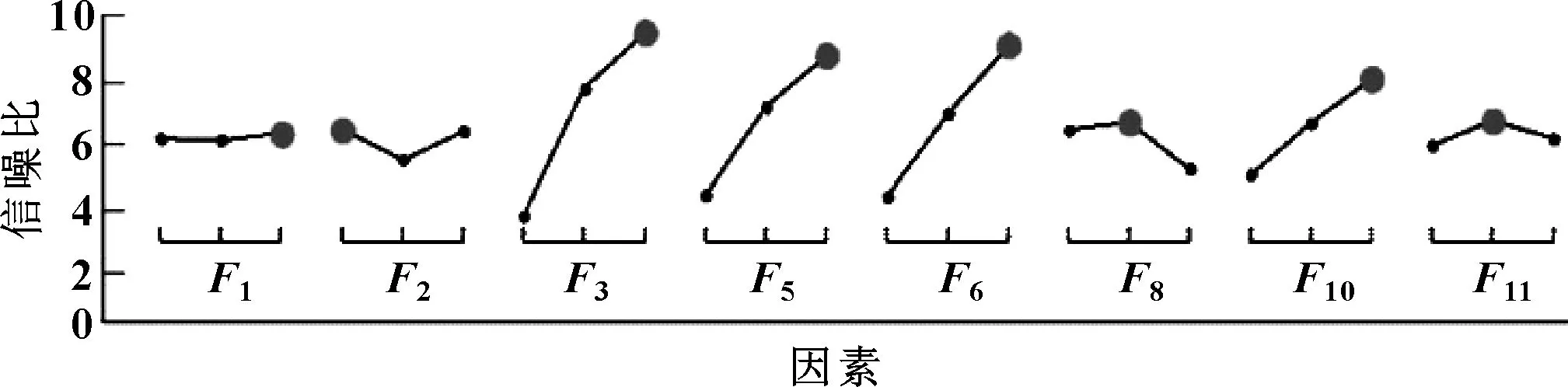
圖6 信噪比主效應(yīng)圖
綜合考慮均值和信噪比,選取可控因子最佳水平組合如表5所示。

表5 可控因子最佳水平組合
4 優(yōu)化結(jié)果分析與驗(yàn)證
根據(jù)穩(wěn)健性優(yōu)化結(jié)果,與優(yōu)化前的懸架C特性進(jìn)行比較,如表6所示。可以看出:懸架在同向回正力矩、同向側(cè)向力、同向縱向力3個(gè)工況下前束角、外傾角、輪距和軸距的變化均值均在目標(biāo)值范圍內(nèi),說明懸架彈性運(yùn)動(dòng)學(xué)特性有較大改善。
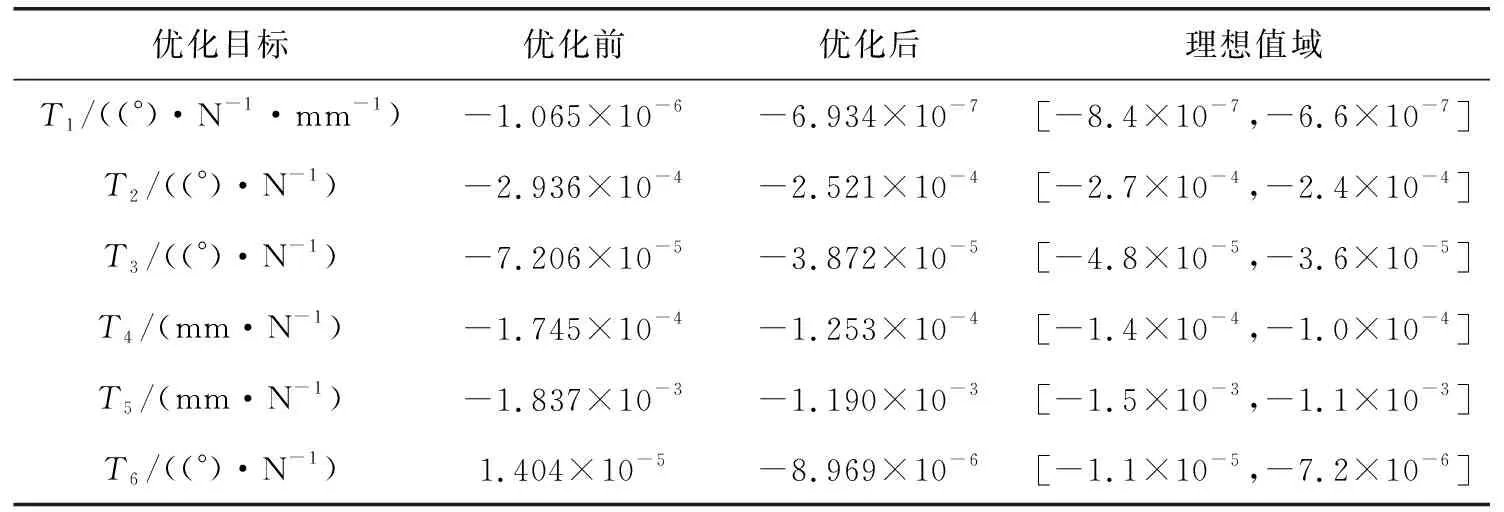
表6 優(yōu)化結(jié)果分析
為證明優(yōu)化結(jié)果的有效性,對(duì)優(yōu)化前后的穩(wěn)健性采用簡(jiǎn)單隨機(jī)抽樣方法進(jìn)行蒙特卡羅驗(yàn)證,采取1 000個(gè)樣本點(diǎn),結(jié)果如圖7所示。由驗(yàn)證結(jié)果可以看出:在考慮懸架硬點(diǎn)安裝誤差的同時(shí),各響應(yīng)的方差也有所減小,表明優(yōu)化后懸架性能的穩(wěn)健性有明顯提高,證明了優(yōu)化方法的有效性。
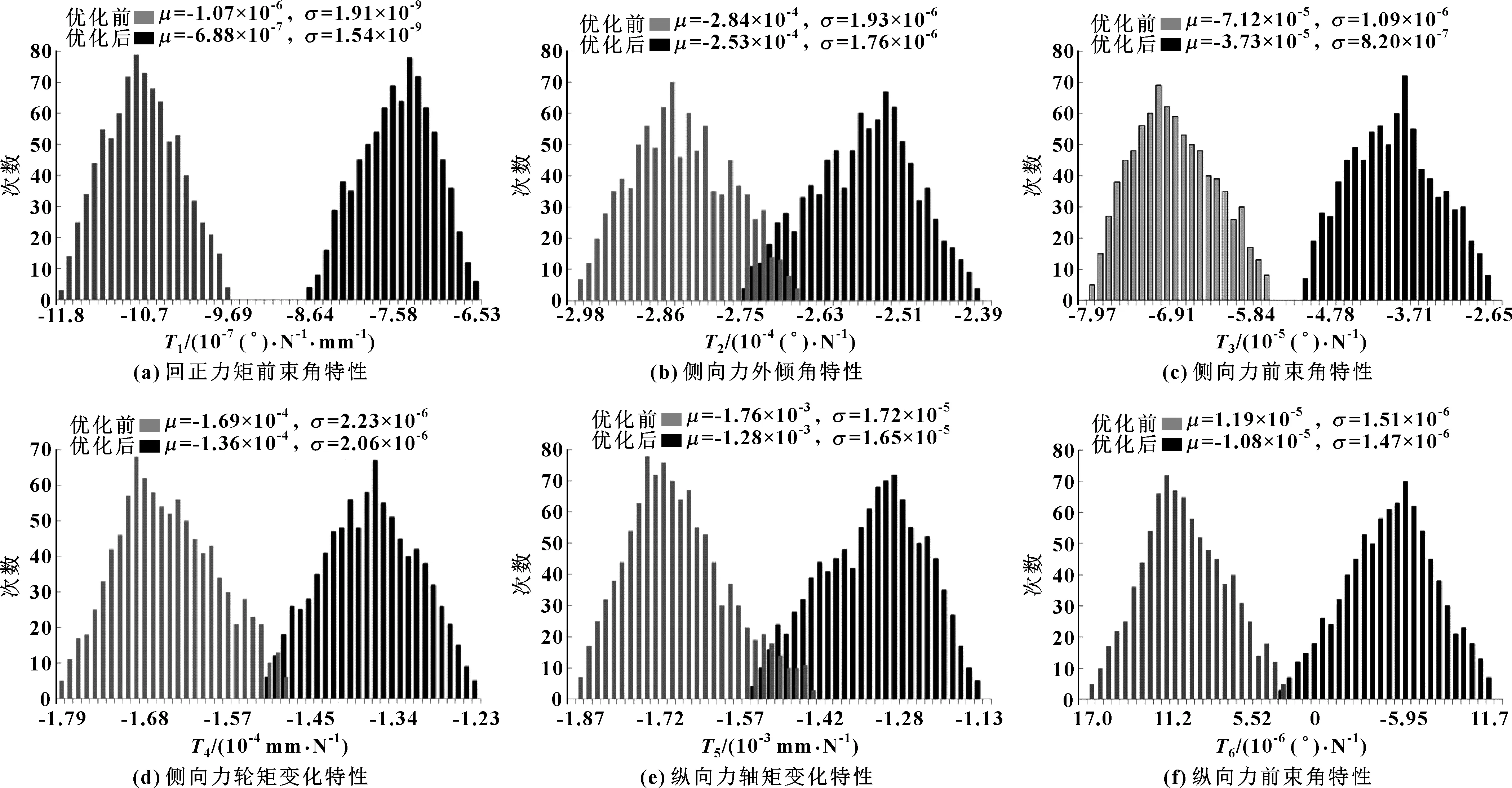
圖7 優(yōu)化前后目標(biāo)響應(yīng)的概率分布
5 結(jié)束語(yǔ)
對(duì)某乘用車H臂多連桿懸架C特性進(jìn)行穩(wěn)健性優(yōu)化設(shè)計(jì),得出以下結(jié)論:
(1)采用AHP法,以工程師評(píng)分的方式將主觀評(píng)價(jià)因素量化,并通過一致性檢驗(yàn),使得響應(yīng)目標(biāo)具有統(tǒng)一性。優(yōu)化結(jié)果達(dá)到懸架C特性的目標(biāo)值域,證明了該方法的有效性。
(2)在樣車調(diào)校階段,通過Isight與ADAMS聯(lián)合仿真,采用田口方法對(duì)H臂多連桿懸架進(jìn)行穩(wěn)健性優(yōu)化設(shè)計(jì),選出最佳水平組合。研究結(jié)果表明:該方法相比于傳統(tǒng)反復(fù)調(diào)整襯套剛度的經(jīng)驗(yàn)法,襯套調(diào)試周期由一周縮短至1~2個(gè)工作日,提高了工作效率,節(jié)約了開發(fā)成本,同時(shí)為整車性能分析提供有效的指導(dǎo)。
參考文獻(xiàn):
[1]KANG J S,YUN J R,LEE J M.Elasto-kinematic Analysis and Optimization of Suspension Compliance Characteristics[R].SAE Paper 970104.
[2]BLUNDELL M V.The Influence of Rubber Bush Compliance on Vehicle Suspension Movement[J].Materials and Design,1998,19(1/2):29-37.
[3]MITCHELL W C,SIMONS R,SUTHERLAND T,et al.Suspension Geometry:Theory vs.K&C Measurement[R].SAE Paper 2008-01-2948.
[4]高晉,楊秀建.襯套剛度對(duì)懸架C特性及瞬態(tài)操縱穩(wěn)定性的靈敏度研究[J].汽車技術(shù),2013(11):33-37.
GAO J,YANG X J.Sensitivity Study of Bushing Stiffness Affecting Suspension Compliance Characteristics and Transient Handling Stability[J].Automobile Technology,2013(11):33-37.
[5]彭亞琪,熊銳,吳堅(jiān),等.襯套剛度對(duì)多連桿懸架彈性運(yùn)動(dòng)學(xué)特性的影響[J].現(xiàn)代制造工程,2015(10):127-132.
PENG Y Q,XIANG R,WU J,et al.Effects of Bushing Stiffness to the Compliance Characteristics of Multi-link Suspension[J].Modern Manufacturing Engineering,2015(10):127-132.
[6]孫禮.多連桿后懸架K&C性能的一種優(yōu)化分析方法[C]//中國(guó)CAE工程分析技術(shù)年會(huì)論文集,2011:105-110.
[7]張瑛,吳光強(qiáng).基于田口方法的汽車懸架穩(wěn)健性優(yōu)化[J].機(jī)械與電子,2015(9):3-7.
ZHANG Y,WU G Q.Robust Design Optimization of the Automotive McPherson Suspension Based on Taguchi Method[J].Machinery & Electronics,2015(9):3-7.
[8]KANG D O,HEO S J,KIM M S.Robust Design Optimization of the McPherson Suspension System with Consideration of a Bush Compliance Uncertainty[J].Journal of Automobile Engineering,2010,224(6):707-716.
[9]ZANG C,FRISWELL M I,MOTTERSHEAD J E.A Review of Robust Optimal Design and Its Application in Dynamics[J].Computers and Structures,2005,83(4/5):315-326.
[10]彭國(guó)甫,李樹丞,盛明科.應(yīng)用層次分析法確定政府績(jī)效評(píng)估指標(biāo)權(quán)重研究[J].中國(guó)軟科學(xué),2004(6):136-139.
PENG G F,LI S C,SHENG M K.AHP in Evaluating Government Performance:Determining Indicator Weight[J].China Soft Science,2004(6):136-139.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
