汽車移動式太陽追蹤系統的控制與實現
2018-06-14 11:52:28賈華,江飛
計算機與網絡 2018年10期
賈 華,江 飛
(內蒙古科技大學,內蒙古包頭014010)
0 引言
由于石油、天然氣的過度開發和使用,以及汽車尾氣的排放和工業污染等原因,導致霧霾天氣越來越多,溫室效應也越來越嚴重。太陽能作為當前最熱門的新能源的一種,有著不可估量的發展優勢和潛力。近年來,開發新型的可再生能源已經成為了能源研究領域的重點。目前,很多追蹤太陽采用的都是將太陽能電池板固定安裝在平臺上面。為了能夠適應不同平臺的需要,移動式平臺逐漸被重視,但是移動式平臺追蹤需要考慮動態追蹤,在目標丟失后進行重新找回等因素。2010年Mousazadeh等[1]通過將太陽能電池板放在混合拖拉機上面進行實驗,從而得出使用跟蹤系統比固定模式多獲得35%左右的能量[2]。因此,設計和開發精確的太陽追蹤系統,具有非常廣闊的應用前景[3]。
1 太陽追蹤原理
1.1 光電追蹤的原理
太陽在一天中的運動軌跡可以分為水平方向和俯仰方向,光電傳感器布置如圖1所示[4]。當太陽光垂直照射到太陽能電池板時,遮光器3形成的陰影會完全遮住光電傳感器4,遮光器5形成的陰影會完全遮住光電傳感器6。因此,如果光電傳感器4和光電傳感器6完全被遮住時,就是太陽光垂直照射到太陽能電池板上面。
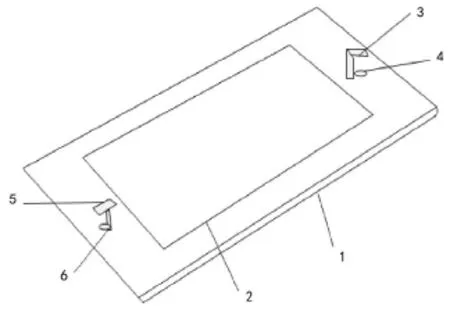
圖1 光電傳感器布置
假如遮光器3在太陽光照射裝置2,沒有完全遮擋住光電傳感器4時,表明太陽光在水平方向上沒有垂直照射到裝置2,控制器會接收到來自光電傳感器4的信號,通過控制水平方向上的步進電機的驅動模塊來控制水平方向上的步進電機轉動,直到遮光器件3完全遮擋住光電傳感器4,使得裝置2在水平方向上面達到被太陽光垂直照射。假如遮光器5在沒有完全遮擋住光電傳感器6時,表明太陽光在垂直方向上面沒有垂直照射到裝置2,單片機會接收到來自光電傳感器6的信號,通過控制步進電機驅動模塊來控制垂直方向上的步進電機轉動,直到遮光器件5完全遮住光電傳感器6,控制器控制垂直方向上的步進電機停止轉動,使裝置2在垂直方向上面達到被太陽光垂直照射。當裝置2中的遮光器3被陽光照射完全遮住光電傳感器4時,遮光器5被陽光照射完全遮住光電傳感器6時,保護太陽能板裝置1上面的太陽能電池板2此時在水平方向和垂直方向都達到太陽直射。
1.2 視日軌跡追蹤
地球在自轉的同時,還要圍繞著太陽進行公轉,如果要想通過GPS信息實現視日運動軌跡[5]進行跟蹤太陽,首先要了解太陽的運行軌跡和規律,才能進行追蹤。太陽高度角和方位角的計算公式如下:

式中,為高度角; 為當地緯度; 為赤緯角; 為時角。
赤緯角 為地球赤道平面與太陽和球中心連線的夾角,[6]公式為:

式中,為積日。
太陽的時角,其中 為被測地點的真太陽時,真太陽=。
式中, 為當地經度;為時差,

因此,太陽方位角 計算公式為:
利用上述公式,根據觀測點的經度、緯度、日期及時間等信息,經過計算,就可以得到該點任何時刻的赤緯角、時角、真太陽時和時差,然后通過這些數據就可以計算出該地區的太陽高度角和方位角。
2 系統設計
2.1 系統軟件設計
目前太陽能電池跟蹤太陽的方法主要有光電檢測跟蹤和視日軌跡跟蹤2種,系統的軟件跟蹤流程如圖2所示。
整個控制系統利用GPS獲取的時間信息判斷白天和黑夜,光電檢測判斷天氣是否晴朗,從而判斷是光電追蹤還是視日軌跡追蹤。剛開始先對系統進行初始化,接下來GPS會獲取當地的日期、時間、經度和緯度等信息,通過時間信息實時判斷是白天還是黑夜。如果控制系統判斷是黑夜,系統則首先會進入低功耗狀態,以便減少系統的損耗。如果判斷是白天,控制系統通過光電傳感器來判斷天氣情況;若是晴天,則進入光電檢測追蹤,得到太陽的大概方位,進行追蹤;若是陰天,則通過GPS得到經緯度和時間信息,傳給單片機,通過視日軌跡算法進行視日軌跡精確追蹤。
太陽的角度變化一般在垂直方向和水平方向同時變化,為了能夠精確地追蹤太陽,一般在追蹤的時候,先進行垂直方向追蹤,等垂直方向追蹤好之后,在進行水平方向的調整。
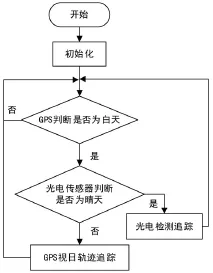
圖2 系統的軟件跟蹤流程
2.2 硬件設計
系統硬件結構如圖3所示,選用的是STM32系列高性能32位處理器STM32 F103ZET6,該處理器具有低功耗和多種省電工作模式,并且輸出接口比較多,滿足設計的要求。
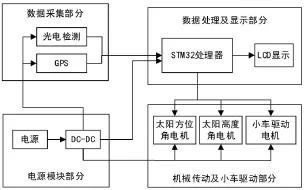
圖3 硬件設計
該部分由數據采集、數據處理及顯示、機械傳動及小車驅動和電源模塊4部分組成。數據采集部分負責采集經緯度、時間及天氣等信息,將信息傳送給單片機,由數據處理及顯示部分對信息進行處理,來驅動方位角電機和高度角電機,達到追蹤太陽的目的,并且進行數據顯示,電源部分負責給整個系統供電。
系統采用GPS模塊來獲取當地的經度、緯度、日期和時間等信息,通過視日軌跡跟蹤算法算出實時的太陽高度角和方位角,將得到的角度信息換算成步進電機需要轉動的步數,從而帶動太陽能板轉動,精度可以達到1°左右。采用MPU6050傳感器測量太陽能板實時的水平角度信息和俯仰角度信息,將得到的信息進行處理,處理的信息與視日軌跡跟蹤算法算出的角度信息進行比較判斷,如果二者角度信息相等,則表明太陽能電池板已經轉動到系統所要求的位置;如果二者角度信息不相等,則表明太陽能電池板沒有達到要求轉動的位置。通過計算出二者之間的角度差,將角度差換算成步進電機轉動方向的角度,來驅動步進電機轉動相應的角度,從而使太陽能電池板轉動到要求的位置。將利用視日軌跡算法算出來的高度角和方位角信息通過LCD1602顯示出來,以便進行觀測。
通過藍牙對小車進行控制,利用PWM對小車的速度進行控制。通過控制電機的通電方向來實現對小車的方向進行控制,從而模擬汽車,通過藍牙控制小車的轉向,來觀測移動式太陽能板應速度。
3 系統測試
通過在單片機上面編寫算法,計算出內蒙古包頭(東經109.51°,北緯 40.41°)2017年 10月 10日 8:00~17:00,每隔一小時的高度角和方位角,計算結果如表1所示。本次采用的日梭萬年歷的值為標準值,將單片機計算的的結果,用LCD顯示出來。
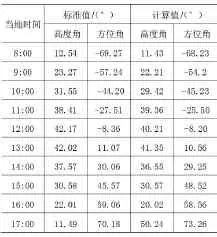
表1 標準值和計算值對比
4 結束語
通過分析太陽的運動規律,將傳統的光電追蹤和視日軌跡追蹤2種方式進行相結合,通過GPS模塊獲取的時間信息進行判斷白天和黑夜,進而再通過光電傳感器再判斷天氣是否晴朗,從得到的信息來判斷是執行光電追蹤還是視日軌跡追蹤,并且先進行俯仰方向的追蹤,再進行水平方向的追蹤。使太陽能電池板的輸出功率最大化。
由實驗結果分析可知,移動式追蹤相比傳統式的追蹤,能夠更加有效地利用太陽能,此方式對移動式追蹤具有一定的意義。
[1]Mousazadeh H,Keyhani A,Javadi A,et al.Design,Construction and Evaluatio of A Sun-tracking System on Mobile Structure[J].Journal of Solar Energy Engineering,2011,133(1):169-175.
[2]羅偉平.基于PLC的太陽能電池板自動跟蹤系統的研究[J].計算機技術與應用,2009(9):138-140.
[3]寧澤,高繼春.發展太陽能光伏發電的意義及前景[J].西北輕工業學院學報,2002,2(1):82-84.
[4]李宗濤,李志剛,于存貴,等.基于單片機的太陽追蹤系統的設計[J].電子設計工程,2014,1(2):188-190.
[5]袁信,張洵.太陽方位算法的研究和設計[J].天津航海,2011(3):1-4.
[6]賀蕭雷,于賀軍.太陽方位角的公式求解及其應用[J].太陽能學報,2008,29(1):69-72.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中華手工(2017年2期)2017-06-06 23:00:31
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
