基于ADAMS的平面四連桿機構仿真分析
2018-06-14 06:12:34王新海陳志華
機械工程師 2018年6期
王新海, 陳志華
(1.九江學院機械與材料工程學院,江西九江332005;2.北京信息科技大學機電工程學院,北京100192)
0 引言
平面四連桿機構是機械領域中重要的組成部分,它可以滿足各種各樣的運動要求,其組成結構相對簡單、成本低、結構緊湊,在機械自動化控制中的應用較為廣泛,例如四自由度工業機器人[1]、液壓支架[2]、汽車設計[3]等。
利用仿真軟件來設計平面四連桿機構的運動特性,其設計方法和原理相對簡單明了。因此,我們可以利用ADAMS軟件強大的運動學和動力學功能,快速、準確、有效地仿真出四桿機構的運動特性,為今后設計四桿機構上創造有利的條件。
1 虛擬樣機技術和ADAMS軟件闡述
虛擬樣機技術就是利用軟件所能提供的各個零件的幾何尺寸及物理信息,然后根據各個零件的基本信息,利用計算機對組成機械系統的各個零件進行虛擬裝配,從而獲取產品在計算機上的數字模型,即可稱之為虛擬樣機,進而對其進行仿真分析[4-5]。這種方法最直接的好處在于,設計人員能夠在計算機上進行多次實驗測試和仿真,仿真出多種實驗方案,最終得到滿足設計要求的最優結果。避免了傳統設計方法的弊端,從而在一定程度上縮短了開發周期,降低了開發成本,提高了產品的質量[8]。
ADAMS軟件是由美國公司研發出來的一款具有強大功能的仿真軟件,它把建模、求解、可視化技術集合在一起。ADAMS軟件有很多模塊,其中最主要的模塊是ADAMS/View(用戶界面模塊)和ADAMS/Solver(求解器)。這2個模塊功能很強大,可以對我們現有的大部分機械模塊進行仿真。在實驗仿真過程所需要的模型可以利用2種不同的方法建立:一是直接在ADAMS環境下進行實體建模,然后進行仿真;二是利用三維建模軟件(如Pro/E、SolidWorks及其他軟件)建立好的模型直接導入到ADAMS軟件中,然后添加相關約束副、驅動力和力矩,即而進行仿真。
2 四桿機構仿真分析實例
2.1 四桿機構分類
很多機械領域中都用到了四連桿機構。一般四連桿機構分為:曲柄搖桿機構、雙曲柄以及雙搖桿機構[7]。
2.2 從動件運動規律的實例化
四連桿機構是機械原理課程的重要部分。學習并分析四連桿機構的運動特性,為四連桿機構的設計應用打下堅實的基礎[8]。
根據四連桿桿長的設計原則(即式(1)所示的桿長定律公式),在這里我們給出仿真過程中4個桿長的具體長度為:曲柄AB=120 mm,連桿BC=250 mm,從動桿CD=260 mm,機架AD=300 mm。具體原理圖如圖1所示。

圖1 四連桿機構建模圖
四連桿機構的桿長定律公式為:

根據式(1),將圖1中已知數據代入,我們可以得到式(2),且我們設計給出的數據滿足桿長定律,驗證了我們數據的準確性,具體公式如下:

3 ADAMS仿真四桿機構過程
四連桿模型仿真實驗有2種建立方法:一種是通過Pro/E或者UG三維軟件建模,然后導入到ADAMS軟件中進行仿真實驗;另外一種方法就是直接在ADAMS里面建模并加以仿真。由于四連桿機構相對簡單,我們采用方法二,即直接在ADAMS里面進行建模仿真。
3.1 ADAMS環境設置
首先,在ADAMS軟件菜單欄選項中的Setting項設置工作網格,x軸方向的兩點間距為10 mm,y軸方向的兩點間距為10 mm。這樣設置的目的在于方便在建模過程中進行點的定位。
3.2 ADAMS中建立模型
在ADAMS軟件界面操作區“Bodies”項的“Solids”中,點擊“RigidBody:Link”圖標,在“Length”中設置桿長,即:曲柄AB=120 mm,連桿BC=250 mm,從動桿CD=260 mm,機架AD=300 mm。最后點擊完成,顯示出四連桿具體模型如圖2所示。
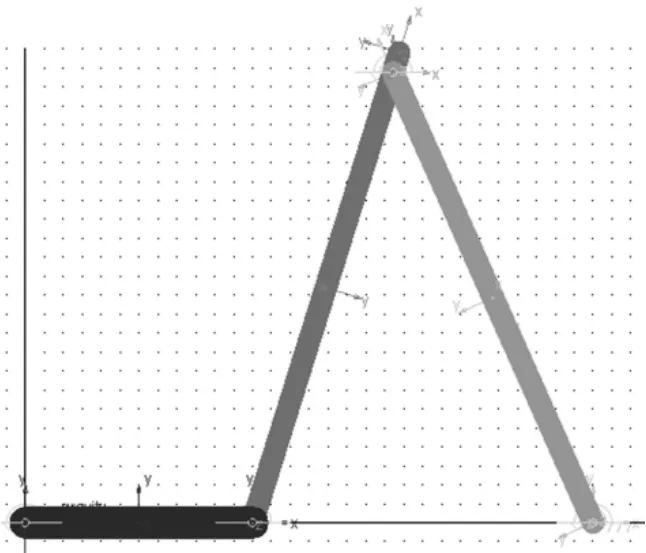
圖2 四連桿機構建模圖
3.3 四連桿機構運動副
四連桿機構中只涉及到轉動副,在ADAMS軟件界面操作區“Connectors”項的“Joints”中,點擊“CreateaRev olute Joint”圖標,分別對4機架與曲柄AB,曲柄AB與連桿BC,連桿BC與從動件CD,以及從動件CD與機架AD之間添加轉動副轉動副約束。
3.4 施加驅動
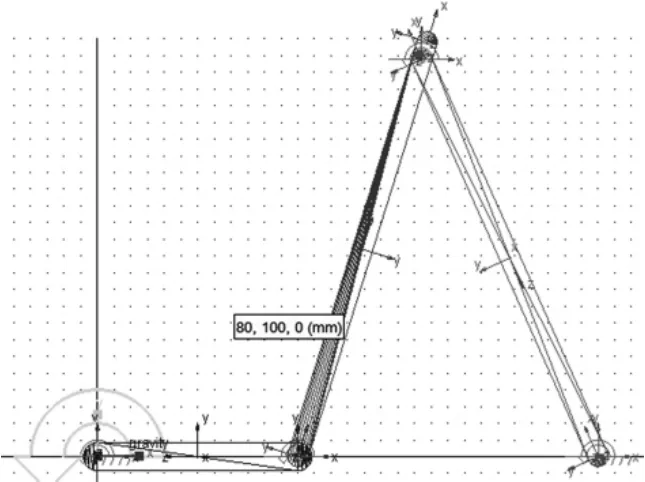
圖3 完整機構模型
只有在給曲柄AB施加驅動力時候,整個四連桿機構才會運動起來。同理,在ADAMS軟件界面操作區“Motions”項的“Joint Motions”中,點擊“Rotational Joint Motions”圖標,在“Speed”中設置曲柄AB角速度w=1rad/s。在設置好以上環境后,保存完整機構模型如圖3所示。
3.5 應用ADAMS軟件對四桿機構仿真分析
在目前機械設計制造領域中,虛擬樣機技術可以說是領先技術,機械虛擬仿真技術是我們設計機械產品不可或缺的仿真工具,虛擬仿真技術的利用可以提高產品設計效率,通過仿真模型,我們可以直觀、生動地了解產品的特性。
通過仿真軟件ADAMS實體建模,并對模型進行運動仿真,使得整個凸輪機構形象化、可視化,而且運動過程更加精確,促使我們更加精確地得到凸輪從動件相對凸輪中心的位移、速度、加速度,從而驗證了運動特性的準確性[10-12]。
根據上述設置工作環境和四連桿機構的相關數據,我們可以仿真得到以下2種特性角[13-15]仿真實驗數據,即:連桿BC與從動件CD之間傳動角γ,搖桿CD兩個極限位置之間的擺角φ。2個角度隨時間的變化如圖4~圖5所示。
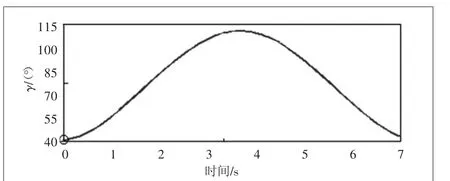
圖4 連桿BC與從動件CD之間傳動角γ隨時間的變化
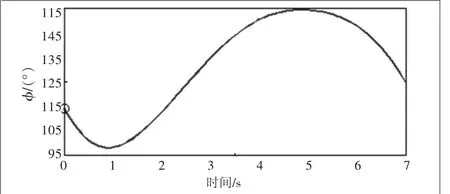
圖5 從動件CD兩個極限位置之間的擺角φ隨時間的變化
3.6 仿真數據與測量結果對比分析
四連桿機構設計實驗中,實際測量數據和計算仿真實驗數據具有一定的作用,兩者進行比較,才能更加具有說服力,也能充分體現設計人員的實驗分析能力。但是在實際測量過程中,由于外界原因干涉,使得實際測量數據和計算仿真實驗數據存在一定的誤差,是人為不可控制的。根據實際測量和計算,利用余弦定理我們可以計算出搖桿CD在2個極限位置之間擺角φ,可得:
根據式(3),將桿長數據代入計算得φ≈56.7868°,而且在ADAMS仿真圖中也可以得到φ≈56.6658°,擺角兩種結果列在表1所示。

表1 擺角φ理論計算與仿真數據對比 (°)
根據表1可以看出,仿真得到的數據更加準確,誤差為零,而實際測量過程由于外界因素的干擾,存在一定的誤差,且此次分析得到的誤差為0.0038%。因此,利用ADAMS軟件分析得到的數據與理論計算誤差較小,驗證了我們ADAMS軟件分析數據的準確性和可靠性。
4 結論
根據數據對比可以看出,傳統實驗測量數據存在一定的誤差,數據的準確性受外界干擾,例如人為因素取值、設備的精確度,以及周圍環境等等。只有改變這些因素,才能提高數據的精確度。另外ADAMS軟件仿真得到的數據準確,誤差為零,更好地解決了四連桿機構設計過程復雜、計算誤差較大問題,為實驗教學打下良好的基礎,更能驗證了ADAMS軟件分析數據的準確性和可靠性。
[1]何全茂,何富賢.平行四連桿機構在平衡吊中的應用[J].煤礦機械,2010,10(3):196-197.
[2]鄭曉雯,王丹,王耀輝.改進的液壓支架四連桿機構的優化設計[J].煤礦機械,2009,10(1):1-3.
[3]寧水根,黃健,張勇.客車外擺式行李艙門四連桿機構設計[J].汽車工程師,2012(2):22-24.
[4]鄭凱,胡仁民,陳鹿民.ADAMS2005機械設計高級應用實例[M].北京:機械工業出版社,2006.
[5]韓曉明,王惠源.基于ADAMS/View機心凸輪機構分析與動態仿真[J].制造業信息化,2005(10):92-95.
[6]徐芳,周志剛.基于ADAMS的凸輪機構設計及運動仿真分析[J].機械設計與制造,2007(9):78-79.
[7]謝進,萬朝燕,杜杰.機械原理[M].2版.北京:高等教育出版社,2016.
[8]孫桓,陳作模.機械原理[M].北京:高等教育出版社,2006.
[9]WANG Kundong,YAN Guozheng,MA Guanying.An Earthworm-Like Robotic Endoscope System forHuman Intestine Design,and Experiment[J].Annals of Bi medical Engineering,2009,37(1):210-220.
[10]宮鵬涵.ADAMS2014虛擬樣機從入門到精通[M].5版.北京:高等教育出版社,2015.
[11]李軍.ADAMS實例教程[M].北京:北京理工大學出版社,2002.
[12]王成,王效岳.虛擬技術及ADAMS[J].機械工程與自動化,2004(6):66-68.
[13]楊晶晶.平面連桿機構計算機輔助設計[J].機電技術,2010(1):48-50.
[14]李偉,于連國.ADAMS在虛擬樣機中仿真分析的應用[J].機電產品開發與創新,2010,23(3):96-97.
[15]高志慧,郭衛東.平面連桿機構創意實驗教學改革與實踐[J].實驗技術與管理,2003,20(2):24-26. (責任編輯 馬忠臣)
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代工人(2020年8期)2020-05-25 09:07:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
科技知識動漫(2016年8期)2016-07-29 20:40:09
太空探索(2016年5期)2016-07-12 15:17:55
