無人機航拍技術在提高長繩跑繩成績中的應用
2018-06-17 11:16:48奚彩蓮林孟群
無線互聯科技 2018年2期
關鍵詞:數據采集
奚彩蓮 林孟群
摘 要:無人機航拍技術作為一種新興的攝像技術,以其應用靈活、便捷高效等特點,正在各個領域得到廣泛運用。在體育競技中,無人機航拍技術尚未得到應用,然而它對運動軌跡、理論研究等提出的積極意義,為以后的研究指出了方向。文章基于長繩跑繩運動,運用航拍技術拍攝了隊員跑繩運動軌跡,通過專業的視頻分析軟件分析了隊員的跑繩軌跡及關鍵點,提出訓練方案,應用在長繩訓練當中。無人機航拍技術在體育中競技具有良好的應用前景。
關鍵詞:航拍技術;自動控制;軟件工程;長繩跑繩;數據采集
隨著跳繩運動日益興起,長繩跑繩作為跳繩運動的一種,受到廣泛的關注。在各大高校中,如何提高長繩隊的成績一直是一個廣受熱議的話題。因此,得到長繩隊隊員的運動形態以及整個隊伍的運動軌跡,成為研究如何提高成績的基礎和前提。此外,在拍攝隊員跑繩軌跡的過程中,如何垂直精確地描繪出跑繩路徑、采集到相應數據對于實驗過程具有重要意義,而這些數據往往由于比例尺、空間結構等因素難以采集,尋常采集方法容易導致誤差過大,并且采集成本較高[1]。
無人機低空航拍遙感系統作為一項空間數據獲取的重要手段,具有成本低、機動靈活、影像實時傳輸、高危地區探測等特點,是高分辨率遙感數據獲取的重要工具之一。隨著無人機遙感監測技術的迅速發展,該技術己成為國內外研究開發的熱點,并在眾多領域得到廣泛應用。在長繩跑繩的研究中,無人機低空航拍占有重要優勢[2]。
而到目前為止,無人機航拍技術還未在體育競技研究方面得到應用。對于研究長繩隊整體的運動軌跡以及單個隊員在各個時刻的運動形態,無人機搭載高分辨率攝像、攝影設備進行航拍的方法都提供了有效的途徑。特別是對于整體軌跡的研究,無人機航拍技術的研究大大提高了研究的效率,減小誤差。并且通過航拍軟件的應用,可以得到無人機航拍器的實時位置信息[3-4]。
1 研究對象和方法
1.1研究對象
華北電力大學長繩隊隊員的跑繩技術。
1.2研究方法
1.2.1無人機航拍飛行技術
運用無人機航拍技術可以從俯拍到長繩隊隊員跑繩的全過程,通過分析錄像可以較精準地得到隊員們的跑繩路徑及關鍵點。
1.2.2文獻資料法
閱讀、收集、整理有關航拍、數據分析方面的文獻,為我們的實驗提供理論基礎。
1.2.3數理統計法
借助MATLAB 8.3和SPSS 19.0軟件,對運動影像視頻分析獲得的數據利用概率分布及統計分析法確定起跳、落地點的位置。
2研究過程
2.1對小型航拍無人機系統的研究
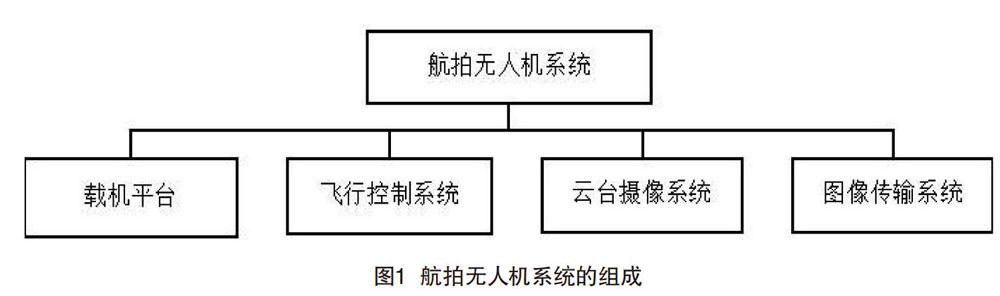
2.1.1航拍無人機系統的組成
航拍無人機系統的組成如圖1所示。
(l)載機平臺。載機平臺可以選擇四旋翼無人機。相對于直升機飛行器,多旋翼飛行器具有機械結構簡單、操作簡便、穩定性高、噪聲小等優點。長繩跑繩是一種在多數情況下于室內進行的運動,因此,采用簡單得多(四)旋翼無人機是較為合適的選擇。
(2)飛行控制系統。飛行控制系統由飛行控制器、姿態傳感器和GPS定位系統組成,可實現飛行器姿態、航向、高度等參數的自動控制。在長繩跑繩的研究過程中,為了采集到整隊的運動軌跡,需要從空中俯拍。
(3)云臺攝像系統。為保證在安全距離下可以拍攝到清晰的圖像資料,采用高精度數字增穩云臺,為攝影、攝像設備提供穩定的拍攝平臺。
由于實驗基本在室內,因此受到外力影像因素較小,對于增穩系統的要求較低。但同時由于本身實驗的范圍較小,數據精度要求較高,對于搭載的攝像系統的像素及分辨率有一定的要求。此外,在考慮到室內光線問題的情況下,對于攝像系統的平角和廣角有一定的選擇。
(4)圖像傳輸系統。地面操作人員可以利用藍牙回傳的實時畫面,對采集到的影像、數據進行及時的調整,保證采集到的影像清晰,數據有效。
2.1.2航拍器的選擇
在長繩跑繩運動中,整個隊伍的跑動軌跡、實時隊伍所處的位置和單個隊員的位置都難以測繪,尤其由于空間視角改變引起比例尺的變化,更加增大測繪的難度。而航拍飛行器經地面操作人員控制,可以直接位于長繩靜止時中點的正上方,并且不影響其日常訓練。此外,在拍攝過程中,往往由于一些實際因素,航拍器在自動控制調節的同時,操作人員也可以根據傳回的實時圖像,通過手動操作使飛行器達到合適的范圍區間內。
我們本次實驗采用的航拍器為大疆4,應用的航拍軟件為DJI GO。
2.2對長繩跑繩技術的研究
本次實驗基于對航拍器的使用研究長繩跑繩運動。首先利用航拍器對運動軌跡進行研究,利用自動控制原理和模糊影像分析技術,分析圖像各因素的權重,利用關系公式使航拍器達到最佳高度。在調到最佳位置之后,利用航拍記錄實時影像(運動員軌跡)并存儲。拍攝完成之后,通過數據分析,得出最佳的軌跡,并描繪出相應的點做成輔助練習器,運用到平常訓練之中。經過一個訓練周期以后,再次運用航拍,測出現在的實時影像,并與此周期以前采集的數據相對比,得出實驗結論。實驗流程如圖2所示。
2.2.1進行航拍,得到首次采集的圖像
航拍軌跡示意如圖3所示,航拍器飛行位置示意如圖4所示,此時飛行器處于中心點的正上方,并清晰地得出了一個較為整齊的類似“∞。”形狀的運動軌跡。通過DJI GO的記錄可知,此時飛行器距離地面高度為9.00 m。
為了使拍攝效果清晰,根據對稱原理,航拍器的位置應正好位于長繩跑繩的中央,如圖3所示。而飛行器的高度,則需要根據目標大小實現自我調節控制。
2.2.2對于圖像進行模糊識別
將采集到的圖像進行模糊識別,并手動確定我們需要的部分(本實驗中以軌跡的長度作為衡量的首要因素),得出我們所需要的占空比(需要圖形占整個空間的比例)等有關因素。這些有關因素將直接影響飛行器的高度和位置。
2.2.3代入關系公式,得出控制數據
根據抽象的幾何圖形進行適當建模,利用高度和視野大小的關系公式,考慮帶來的誤差,并計算權重。由抽象模型可得,高度(h)與占空比(t)的關系:h=b·t(6為航拍器攝像系統的自帶系數)。
根據示意圖所示,應有6個主要的影響角度。則[Sk,Sk]表示第k個角度的評判區間,則6個角度給出的評判區間構成了集值統計序列。根據各個角度的位置,以及影響大小,我們定義出各個角的權重系數h^(k=l,2,…,6),則加入權重系數后的評價指標為:
2.2.4利用相關數據,調整航拍器高度和視野
通過對影像數據的整理,我們得到目前的所有相關數據;通過對關系公式和權重的計算,得到控制數據。將兩個數據進行對比,得出飛行器應該調整的高度為8.90m。
2.2.5利用得到的數據進行航拍
根據我們算出的數據,再次進行航拍。長繩隊隊員進行3 min的計時跑繩,我們控制無人機在長繩中心點上方、距地面9.00 m的位置靜止,運用DJI GO軟件,我們可以通過手機查看飛行器相機的實時畫面并錄制視頻,同時實時查看相機參數,以進行航拍器位置的微調。
2.2.6分析視頻,得到最佳路徑及關鍵點
我們運用專業的視頻分析軟件coach- eye來分析錄制的航拍視頻。首先選取了速度較快且動作標準的5次進繩出繩動作,在圖中標記了他們的起跳點落地點及跑繩路徑,如圖5-6所示。之后我們運用視頻分析軟件,建立了平面直角坐標系,確定比例尺(由于比賽規定兩搖繩者之間距離不能小于3.6 m,故在隊員訓練時兩搖繩者之間的距離始終固定為3.6 m),進行數據采集。
得到多組路徑及關鍵點之后,我們算出了平均值,即可以提高跑繩速度的最佳的數據,如表l所示。數據在軌跡圖中的體現如圖7所示。
2.2.7將最佳數據運用到隊員日常訓練中
我們將得出的數據應用到長繩隊新隊員的訓練當中,規范他們的動作,并根據隊員的反饋微調了我們的數據。隊員訓練頻率為每周3次,每次一小時。我們記錄了新隊員在整個訓練周期內的長繩個數,如圖8所示。
從圖中曲線走勢可以看出,新隊員的跑繩水平有了明顯的提高。
2.2.8將再次航拍所得數據與最佳數據比對
訓練兩個月之后,我們再次進行航拍,來驗證新隊員通過規范了技術動作而達到了提高跑繩技術的目的。長繩隊隊員仍然進行3 min的計時跑繩,我們控制無人機并錄制視頻,同時實時查看相機參數,以進行航拍器位置的微調。
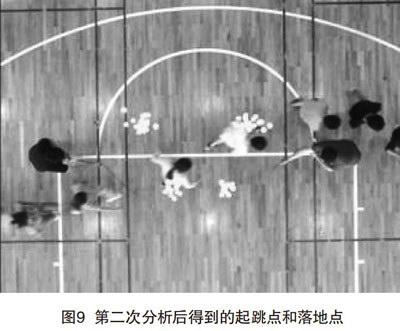
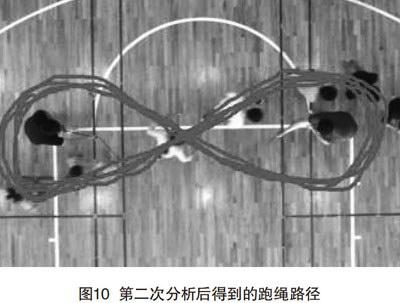
通過coach- eye視頻軟件分析后,結果如圖9-10所示。建坐標系分析后,兩次所得數據如表2所示。
對跑繩運動中的di設置條件閾值D,xi設置條件閾值為X,通過歷史經驗分析得出D=1.31,X=5.32;在本次試驗中,差值明顯在閾值的范圍之內,故可以得出跳繩隊員的軌跡已經趨近于最佳狀態。
3結語
在實驗中,我們通過航拍得到優秀隊員的跑繩路徑及關鍵點的數據,將這些數據應用在輔助練習器上以規范長繩隊隊員的動作。但是這種方法雖然有效,卻不能直觀地使隊員發現他們動作上的不足。
理想狀態下,我們可以進行運動技術診斷的方法。長繩隊日常訓練時,可使用航拍器錄制視頻,并有軟件自動分析,若發現隊員沒有踩到標準的起跳點落地點,或是實時路徑與標準路徑相距過大時,便發出警報。隊員可回看視頻,找出動作缺陷。也可以單獨測評一名隊員的動作,對其進行打分,幫助隊員改善動作。
此外,在未來無人機技術的發展中,可以運用多個無人機組成一套測量攝像體系,從而精準地得出目標對象的三維運動圖像,為研究目標對象的運動方式、姿態,提供更精準的依據。
[參考文獻]
[1]逯曦,任曉毓,張華明,等.無人機航拍技術在雷電防護中的應用[J]氣象科技,2015 (6):1176-1180
[2]韓露.基于航拍圖像的目標檢測系統設計與實現[D]北京:北京理工大學,2015
[3]陳智.淺議無人機航拍的應用[J]時代金融,2014 (15):210-211.
[4]李曉龍,張兆翔.深度學習在航拍場景分類中的應用[J]計算機科學與探索,2014 (3):305-312
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53