基于UG的燃氣輪機起動離合器動力學仿真
2018-06-20 10:19:30宋萬成
航空發動機 2018年1期
關鍵詞:分析
宋萬成,吳 森
(海軍駐沈陽地區發動機專業軍事代表室,沈陽110043)
0 引言
某燃氣輪機的起動離合器采用的是棘輪與制動爪組合的結構,并依靠離心力使制動爪在特定轉速下脫離,這種設計使得在燃氣輪機工作時離合器主、從動部件沒有物理接觸,從而使機構的壽命延長和可靠性提高[1]。但在實際使用過程中,該離合器出現多次零件斷裂的故障。由于結構的封閉性,較難在實物中觀察到離合器的工作過程。目前的故障分析方法是分析零件的斷口形貌并測量電機電流,從而推測故障的產生原因。而分析結果表明,離合器受力零件的強度滿足設計要求,電機的電流波動與故障出現并無直接聯系,可能存在其他設計階段未預料到的載荷。
為分析離合器的工作過程是否存在未知的載荷情況,本文采用UG動力學仿真技術對其進行了模擬,記錄模擬過程中可能出現的沖擊、刮碰等情況,分析它們的影響因素和影響效果。
1 離合器的結構和原理
離合器由棘輪、制動爪、銷和傳動齒輪組成,如圖1所示。棘輪與起動電機連接,將扭矩通過棘齒傳遞給制動爪。制動爪通過銷將載荷傳遞給傳動齒輪,從而驅動附件機匣中的齒輪系和燃氣輪機轉子。
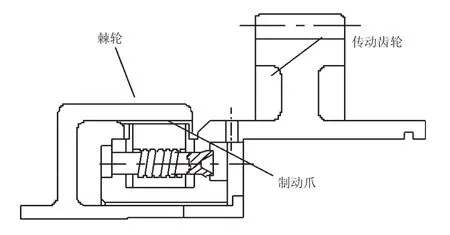
圖1 離合器的結構
起動時,傳動齒輪處于靜止狀態,制動爪(如圖2所示)被彈簧彈出,與棘輪的齒面接觸。當起動電機旋轉時,棘輪帶動制動爪和傳動齒輪旋轉。當傳動齒輪達到某一轉速時,制動爪配重部分的離心力使其繞銷孔旋轉,制動爪與棘輪分離并貼靠在支承銷上。
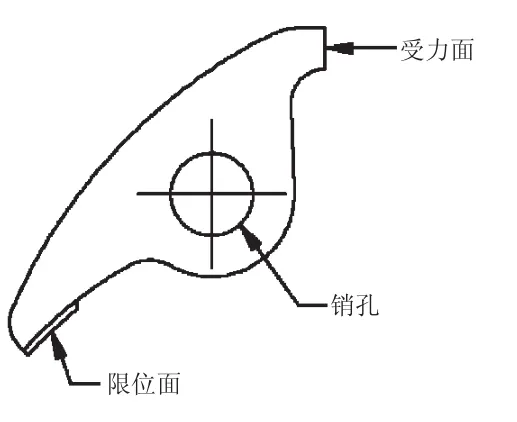
圖2 制動爪
2 仿真模型的建立
UG的動力學仿真給3維實體模型的各個部件賦予一定的運動學特性,再在各個零部件之間設立運動副、傳動副以及約束即可建立1個運動仿真模型[2]。UG集成RECURDYN動力學分析模塊,采用相對坐標系運動方程理論和完全遞歸算法,適用于求解多體系統的碰撞問題,廣泛用于航空、航天及其他通用機械行業[3-4]。
本文使用UG建立棘輪、制動爪、傳動齒輪和銷的3維模型,如圖3所示。UG的運動仿真具有理想的約束功能,因此忽略軸承、定距套等與離合動作無關的零件,以便加快計算過程,提高分析精度。
在本文的運動仿真中不考慮零件的應力和變形,因此制動爪與銷的連接關系可以用旋轉副定義,并在旋轉副上添加扭簧以模擬實際的彈簧作用。扭簧的剛度系數為4.5 N·mm/(°),預壓縮角度為18°。
圖3 3維模型
制動爪與棘輪、傳動齒輪和支承銷之間均存在接觸的可能,因此依次設置3處3維接觸。
本文采用接觸函數(Impact)來模擬3維接觸并求解碰撞力[5-6]
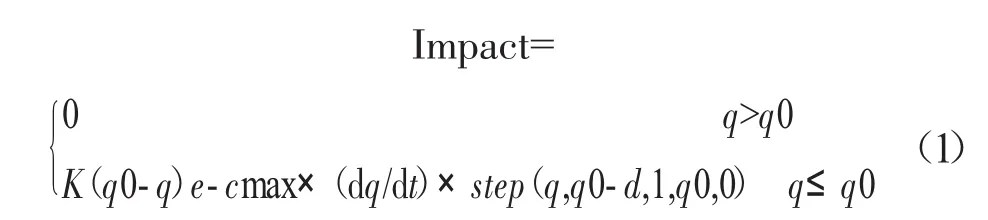
式中:q0為2個碰撞物體的初始距離;q為2個物體碰撞過程中的實際距離;dq/qt為2個物體間距離隨時間的變化率;K為剛度系數;e為碰撞指數;Cmax為最大阻尼系數;d為切入深度。
在UG仿真中,主要對剛度系數(Stiffness)、碰撞指數(Force Exponent)、最大阻尼系數(Damping)和切入深度(Penetration Depth)等4個參數進行設置[7]。
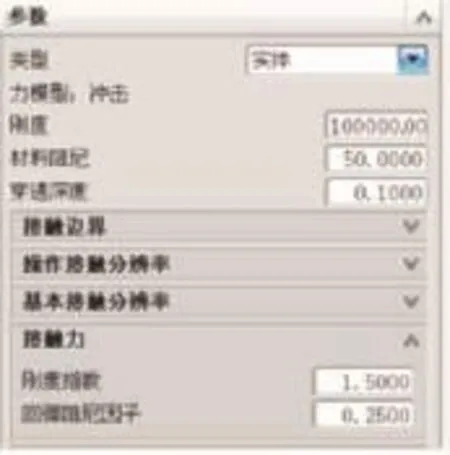
圖4 碰撞參數的設定
剛度系數是指在接觸時因變形而產生的力,取決于碰撞物體的材料和結構形狀;碰撞指數是指物體材料在碰撞時所表現出的非線性程度;最大阻尼系數表示2個物體碰撞時的能量損失;切入深度是指2個物體碰撞至最大阻尼時的侵入深度[8]。本文使用UG默認推薦的鋼-鋼碰撞參數,如圖4所示。
為模擬發動機轉子的質量特性,賦予傳動齒輪質量 400 kg,軸向轉動慣量 1.2×107kg·mm2。為模擬起動電機轉子和棘輪的質量特性,賦予棘輪質量35 kg,軸向轉動慣量 55066 kg·mm2。
棘輪與起動電機連接,因此在棘輪的轉動副上設置扭矩,以模擬起動過程的扭矩輸入。按照設計原理,3組制動爪應同時與棘輪接觸傳力,但在實際工作時常因精度誤差出現單個制動爪傳力的情況,本文模擬這種極端條件下的狀態。
起動瞬間的仿真。某型燃氣輪機對起動時間有嚴格的要求,在起動初始階段即向起動系統輸入較大的電機扭矩。為了模擬該工況,本文使用STEP函數[9],在0~13 s內輸入扭矩從0增加至420 N·m,棘輪的空程則設置為結構所能容納的最大角度22°。仿真設置時間為3 s,步數10000,以獲得準確的起動瞬間結果。
離合器脫開的仿真。在0~13 s內棘輪所受扭矩(T001_Math)從0增加至420 N·m,在第13 s時,給予傳動齒輪94 N·m/s的遞增扭矩(T2_1),使其自行加速以模擬燃氣輪機點火后轉子獲得的燃氣動力[10-11],如圖5所示。仿真設置時間為25 s,步數為20000,以觀察起動過程[12]。
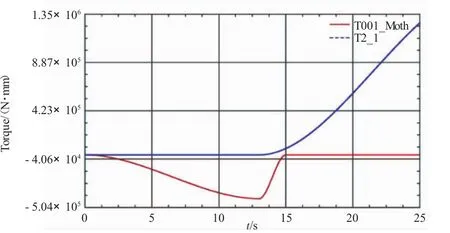
圖5 扭矩的加載
3 仿真結果與分析
起動瞬間制動爪銷孔的受力曲線如圖6所示。起動時制動爪與棘輪間有22°的空程,因此棘輪在電機的驅動下加速撞向制動爪。由于與制動爪相連的傳動齒輪具有更大的慣性,棘輪被反向彈開,隨后在扭矩的作用下棘輪再次撞擊制動爪,直至二者貼合一同運動。
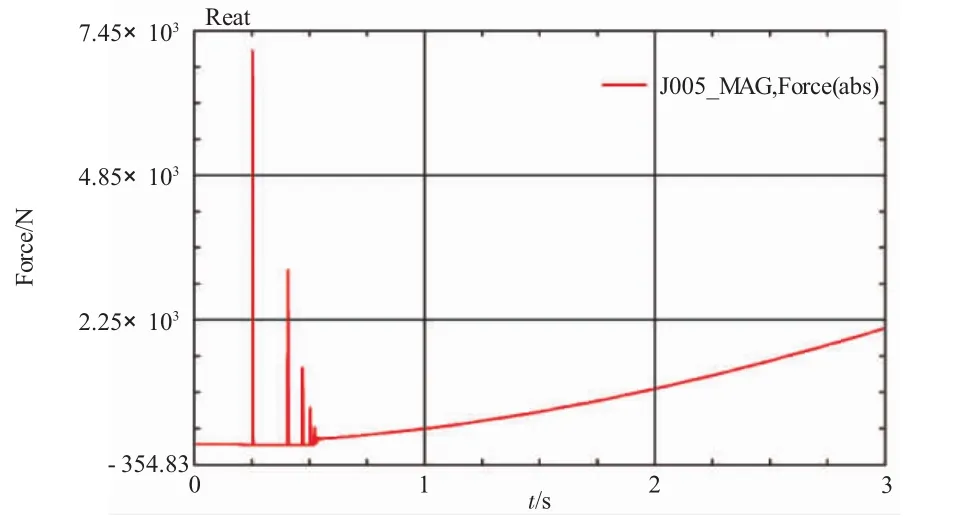
圖6 起動瞬間制動爪銷孔的受力
從圖中可見,由于空程的存在,棘輪對制動爪有較大的沖擊力,該沖擊力經過制動爪傳遞給銷,在銷孔位置形成較大的剪切力。
脫離過程的模擬動畫截圖如圖7所示。考慮到離合器內部經過充分潤滑,本文的模型中沒有設置摩擦因數。從模擬動畫中可以看到,當制動爪與棘輪逐漸脫開后,制動爪在離心力的作用下繼續旋轉,并沒有與棘輪再次刮碰,此時的傳動齒輪轉速約為2950 r/min,與設計狀態的3000 r/min接近。

圖7 脫離過程
制動爪與棘輪之間的碰撞現象是棘輪式離合器的特征[13-14]。為便于研究,將燃氣輪機起動系統傳動鏈變換為直線運動的力學模型,如圖8所示。
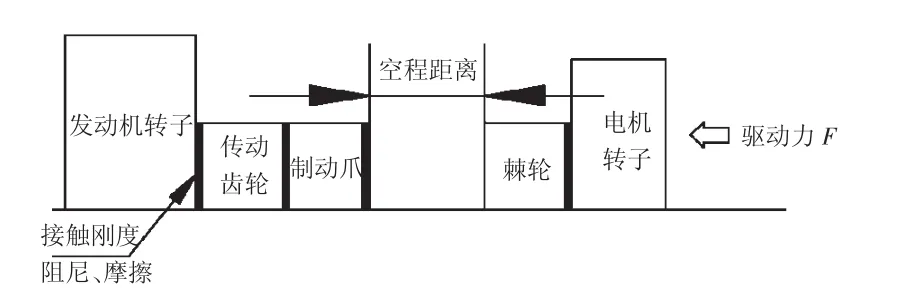
圖8 力學模型
從圖中可見,每個存在接觸的位置都會產生碰撞力,但在現有的起動系統結構下,制動爪與棘輪之間的碰撞是產生沖擊力的主要原因。根據式(1)的求解可知,影響該處碰撞力大小的主要因素有:棘輪和制動爪的空程距離(空程角度),驅動力F,各零件的質量特性和它們之間的接觸剛度、阻尼和摩擦。其中空程距離、驅動力F和轉子的轉動慣量決定了碰撞瞬間的速度。
對于此離合器,空程距離在0~22°區間內隨機變化,其大小取決于制動爪和棘輪的初始位置。對3種空程距離進行仿真計算,得到空程距離與最大沖擊力的關系,見表1。
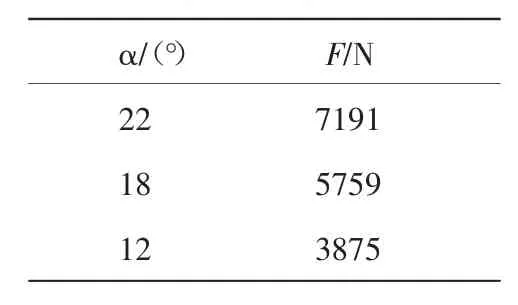
表1 空程距離α與最大沖擊力F的關系
從表中可見,隨著空程距離的增大,沖擊力最大值增大。為減小沖擊力,可以在離合器的設計階段在滿足強度的前提下增加棘輪中棘齒的數量,減小齒間的分度,從而減小空程距離。
在起動的初始階段,電機的力矩(驅動力F)決定了沖擊瞬間制動爪與棘輪之間的相對速度,因此應嚴格控制空程階段電機的力矩。但所研究燃氣輪機采用了開關磁阻電機,其低速下的控制精度較差[15],在實際應用中也發現該電機在200 r/min以下時轉矩有劇烈的波動,產生了較大的沖擊,造成了多次超扭和離合器制動爪斷裂故障。因此,當起動系統選用開關磁阻電機作為動力源,棘輪式離合器作為脫離裝置時,應在二者之間設置緩沖器,以避免電機直接驅動離合器,減小離合器受到的扭矩沖擊。
4 結論
通過仿真試驗可以觀察到離合器的接合和脫開過程,在傳動齒輪達到脫開轉速時,可以發現制動爪與棘輪能夠迅速分離,沒有反復接合現象,驗證了設計的正確性。
在起動瞬間,制動爪及銷軸受到多次沖擊載荷作用,尤其是空程較大的起動條件下,這種現象應被充分考慮。通過增強強度儲備或調整起動電機扭矩的加載規律可以避免破壞或減小沖擊力,也可在設計階段增加棘齒數量,減小分度,有效地降低沖擊力度。在起動電機的選型上應考慮其低速的控制精度是否滿足要求,電機與離合器之間應設置緩沖裝置。
[1]孫新杰.淺談棘輪離合器設計 [J].中國科技信息,2011,8(15):111-116.SUN Xinjie.Introduction to the design of a ratchet clutch[J].China Science and Technology Information,2011,8(15):111-116.(in Chines)
[2]李志尊.UG NX7.5基礎應用與范例解析[M].北京:機械工業出版社,2011:323.LI Zhizun.Based application with examples of UG NX7.5[M].Beijing:China Machine Press,2011:323.(in Chinese)
[3]程明.基于Recurdyn鏈傳動的仿真與分析 [J].機械設計,2013,30(9):42-46.CHENG Ming.Simulation and analysis of chain drive based on Recurdyn[J].Journal of Machine Design,2013,30(9):42-46.(in Chinese)
[4]薛珊,徐龍,趙運來,等.基于Adams與RecurDyn的機械結構Hertz接觸仿真對比分析[J].長春理工大學學報(自然科學版),2016,39(4):73-77.XUE Shan,XU Long,ZHAO Yunlai,et al.Comparative analysis of Hertz contact simulation based on Adams and RecurDyn[J].Journal of Changchun University of Science and Technology(Natural science edition),2016,39(4):73-77.(in Chinese)
[5]吳海寶,吳金強.基于UG和ADAMS的風力發電機組齒輪箱動力學仿真研究[J].機械傳動,2011,35(2):13-16.WU Haibao,WU Jinqiang.Studying on dynamic simulation of wind turbine gearbox based on UG and ADAMS[J].Journal of Mechanical Transmission,2011,35(2):13-16.(in Chinese)
[6]周亮,胡愈剛,王曉平.基于UG軟件的起落架收放機構運動仿真分析技術研究[J].航空制造技術,2013(3):92-94.ZHOU Liang,HU Yugang,WANG Xiaoping.Motion simulation analysis technology of landing gear based on UG[J].Aeronautical Manufacturing Technology,2013(3):92-94.(in Chinese)
[7]劉苗.基于虛擬樣機技術的齒輪嚙合分析 [J].裝備制造技術,2014(4):12-14.LIU Miao.Dynamics simulation of gear meshing based on virtual prototype[J].Equipment Manufacturing Technology,2014(4):12-14.(in Chinese)
[8]楊南.基于UG NX的空間兩岸機構運動仿真分析 [J].大眾科技,2011(9):129-130.YANG Nan.Motion display analysis for spatial linkages based on UG NX[J].Cumulatively,2011(9):129-130.(in Chinese)
[9]陳正水,鄧益民.基于UG的STEP運動仿真函數對運動時間的控制分析[J].寧波大學學報(理工版),2012,25(4):103-106.CHENG Zhengshui,DENG Yimin.UG-based STEP motion simulation function on motion time[J].Journal of Ningbo University(NSEE),2012,25(4):103-106.(in Chinese)
[10]趙曼莉,嚴海華.氣墊船燃氣輪機的起動系統簡介[J].船舶,2008(4):38-40.ZHAO Manli,YAN Haihua.Gas starter in hovercraft gas turbine[J].Ship&Boat,2008(4):38-40.(in Chinese)
[11]欒永軍,孫鵬,俞世康.船用三軸燃氣輪機起動特性研究[J].艦船科學技術,2010,32(8):105-109.LUAN Yongjun,SUN Peng,YU Shikang.Analysis of start behavior of triaxial marine gas turbine[J].Ship Science and Technology,2010,32(8):105-109.(in Chinese)
[12]孫曉軍,劉德宏.液壓起動系統在燃氣輪機上的應用[J].航空發動機,2007(增刊 1):74-75.SUN Xiaojun,LIU Dehong.Application of hydraulic starting system in the gas turbine[J].Aeroengine,2007(S1):74-75.(in Chinese)
[13]周曉,馬秋城,張躍春,等.大功率自動同步離合器棘輪棘爪碰撞過程仿真分析[J].機械科學與技術,2015,34(6):836-839.ZHOU Xiao,MA Qiucheng,ZHANG Yuechun,etal.Simulation analysis of ratchet and pawl collision process in highpower synchronous-self-shifting clutch[J].Mechanical Science and Technology for Aerospace Engineering,2015,34(6):836-839.(in Chinese)
[14]沈小剛,劉永文.船用同步離合器棘輪棘爪碰撞問題的仿真分析[J].船舶工程,2010,32(3):24-26.SHEN Xiaogang,LIU Yongwen.Simulation analysis of the collision problem to the ratchet and pawl mechanism in marine synchronous clutch[J].Ship Engineering,2010,32(3):24-26.(in Chinese)
[15]趙沛群.淺談某型燃氣輪機起動電機的特點及應用 [J].科技創新導報,2014(30):40.ZHAO Peiqun.The characteristics and application of a gas turbine starter[J].Science and Technology Innovation Herald,2014(30):40.(in Chinese)
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06