Freescale ColdFire 32位微控制器MCF52234實驗系統的模塊設計及應用
2018-06-22 02:59:28許燕
微型電腦應用 2018年6期
許燕
(陜西國防工業職業技術學院, 西安 710300)
0 引言
過去的20多年,8位微控制器廣泛用于各領域,并控制整個市場,并由用戶系統推動8位、16位微控制器向32位過渡,后者的優越性、功能也是先進應用必不可少的內容。據相關調查數據表明,截止2011年,32位微控制器總出貨量或大于20億個,收入則以18%年率增長。隨著行業不斷向著32位MCU過渡,設計者不單要增設相應的功能,也要增加各種外用設備。而在產品進行升級換代過程中,我們一般使用較低的代價把軟件、硬件轉移至另一個核上。使用者設計一些產品時,必然會同時用到8位、16位微處理器。加之,同一個產品或者系統內可能涉及多個MCU,如:在工業網絡設計中,主控制器運用32位MCU,每一個探頭均為8位MCU等。因用戶同時需要8位及16位產品,希望研發一種完全兼容的開發系統。
基于此,本文以 32位控制器 當做主控制器,對系統的主控及外圍實驗模塊展開設計,順利實現32位微控制器實驗系統,以期為類似研究提供一定參考。
1 系統總框架
微控制器實驗系統使用模塊化設計方法,主要包含主控及外圍實驗兩個部分,其中,主控模塊運用可插拔式設計方案,便于設計人員及時更新微控制器,也有利于用戶挑選不同的微控制器開展實驗。本次研究所用的Freescale 32位微控制器主控模塊,外圍實驗模塊由多數實驗器件組成,他們能依托實驗線與主控制器進行連接,開展一系列的實驗。系統總框架如圖1所示。
2 系統模塊功能設計
2.1 主控模塊設計
主控模塊主要由電源轉換、以太網通訊、電壓轉換等模塊組成,并采用MCF52234當做主控制器,它屬于由Freescale公司生產出來的32位微控制器,其最高處理頻率設定為60 MHz,其內部包含豐富的串行接口、模數轉換器、實時時鐘等。
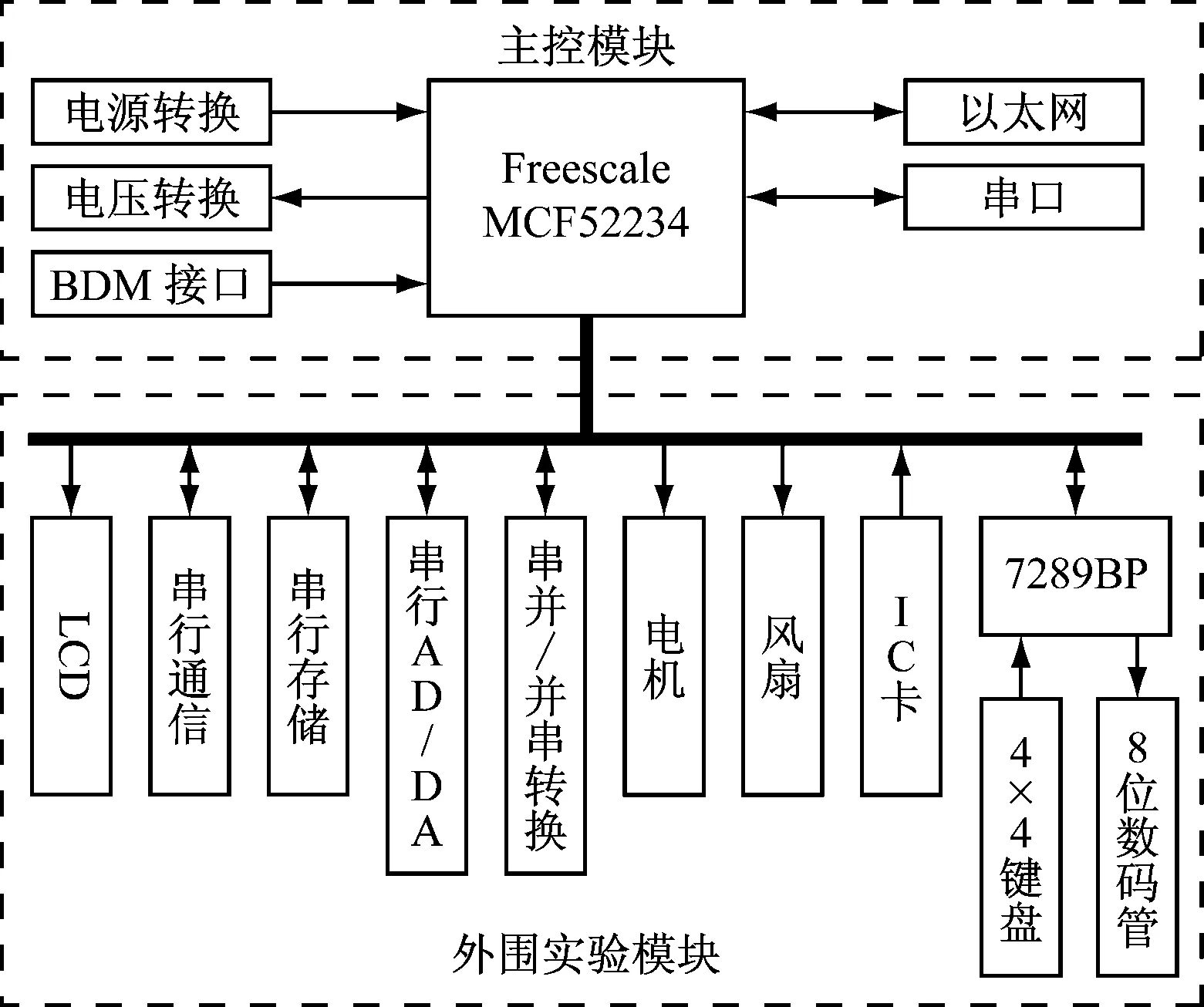
圖1 系統具體框圖
2.1.1 電源轉換模塊
因MCF52234通過3.3 V實現供電,因此,必須把系統5 V電源轉變為3.3 V電源。系統內配置線性轉換電源芯片LM1117,可把所輸入的5 V電源轉變為3.3 V。LM1117作為低壓差線性調壓器,能夠輸出穩定、波紋小的電壓,有助于主控器正常運行。電源芯片連接原理,如圖2所示。
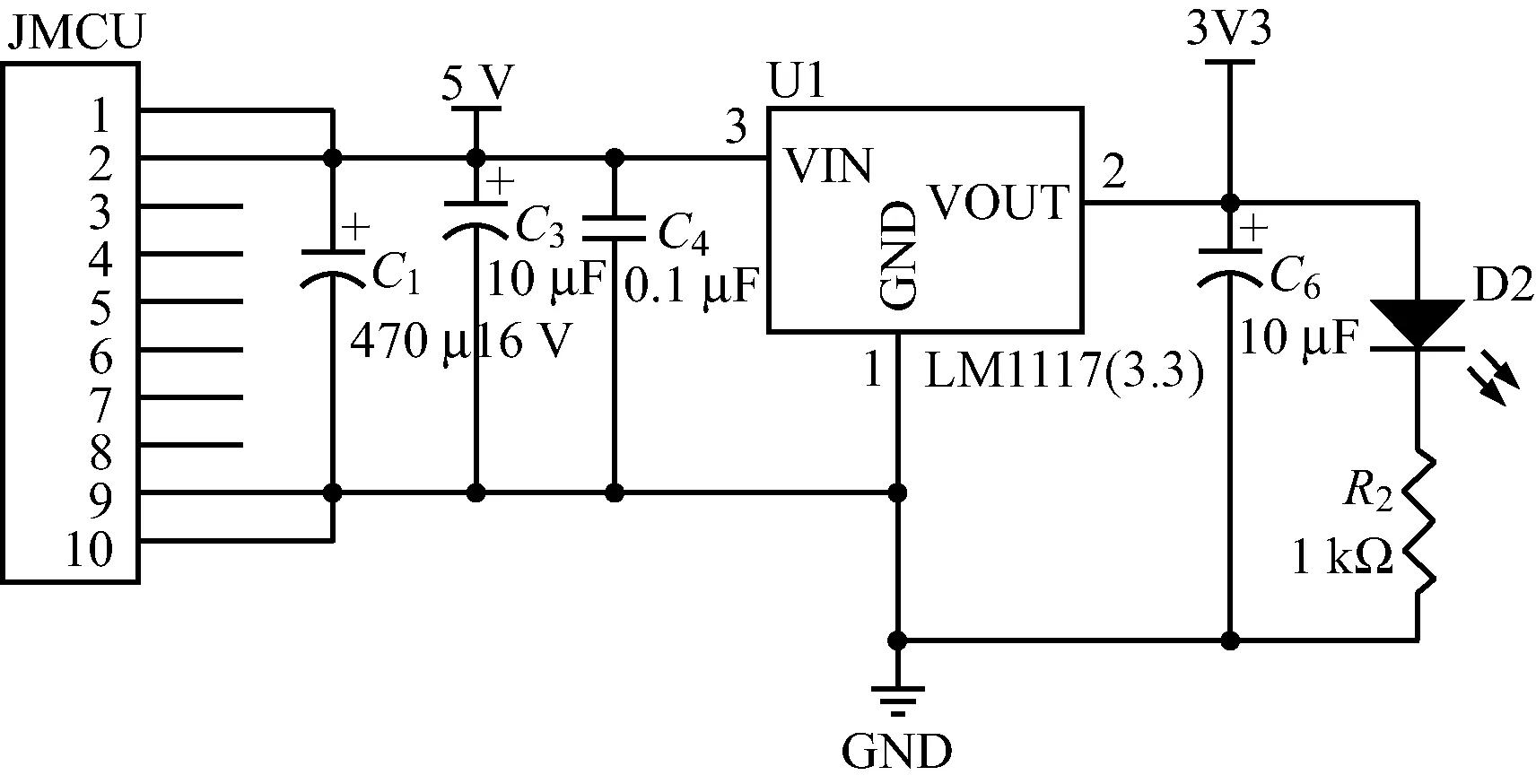
圖2 LM1117電源芯片實現連接原理
2.1.3 電壓轉換模塊
因微控制器與外部設計的電路邏輯電平并不兼容,必須實施電平轉換。74LVX4245屬于雙向總線收發器,利用它能順利實現邏輯電平3.3 V與5 V之間的轉換。A端口設定為5 V總線,B端口則為3.3 V總線,利用方向控制端(DIR)合理控制信號輸入輸出。如果DIR處于邏輯0電平狀態,A端與B端口分別為輸出、輸入端,能順利把邏輯電平3.3 V轉換為5 V。反之,若DIR是邏輯1電平,情況恰好相反。74LVX4245進行連接,原理如圖3所示。
2.1.4 以太網設計
MCF52234主要特點在于,由于其內部設置快速的以太網控制器(FEC),它提供10、100 Mbps這兩種以太網協議,把硬件與微程序融合起來,從而發揮以太網訪問控制器具體功能。FEC利用工業標準媒體獨立接口(MII)與片內或外界EPHY實現通訊,并依托部分緩沖器與CPU內核實施通信。FEC借助內部集成的DMA控制器與緩沖區之間實施數據交換,能夠及時處理載波監聽多路訪問/沖突檢測協議,發送及接收操作均達到IEE802.3標準。
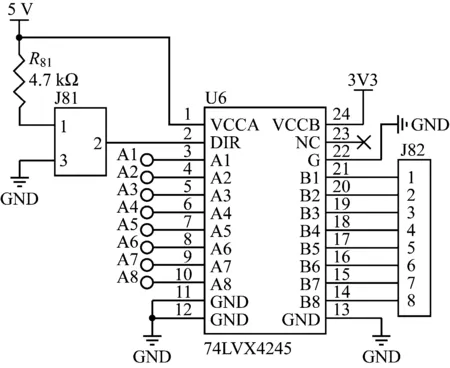
圖3 74LVX4245連接操作原理
2.2 設計外圍實驗模塊
2.2.1 LED及LCD顯示模塊
LED顯示模塊設置8位8段數碼管,運用共陰極的方式實現連接。系統依托ZLG7289BP與8位數碼管及4×4鍵盤實現連接。其中,ZLG7289BP設置SPI串行接口,能夠同時驅動8位共陰極數碼管,可以與64鍵的鍵盤實現連接。同時,LCD顯示模塊以RT12864M當做LCD顯示器件。RT12864M系統作為圖形點陣型液晶顯示模塊,其主要功能在于顯示128(列)×64(行)點陣,以此全面顯示圖形,。此外,也支持顯示(8×8)個的漢字。此外,RT12864M設定7條控制指令,接口運用8位數據總線,采用并口輸入輸出的方法實施操作。
2.2.2 串行通信及存儲模塊
從串行通信功能分析,系統運用RS-232、RS-485這兩個異步串行通信接口,模塊電源通過MAX232、MAX485芯片與計算機實現串行通信。而串行存儲模塊內,系統運用2個EEPROM串行存儲器,主要配置SPI及I2C接口。系統通過X5045開展SPI串行存儲實驗,其中,X5045作為配置SPI接口的串行EEPROM芯片,其存儲量大大4KB。同時,X5045提供上電復位控制、降壓管理等功能。X5045實現連接,如圖4所示。
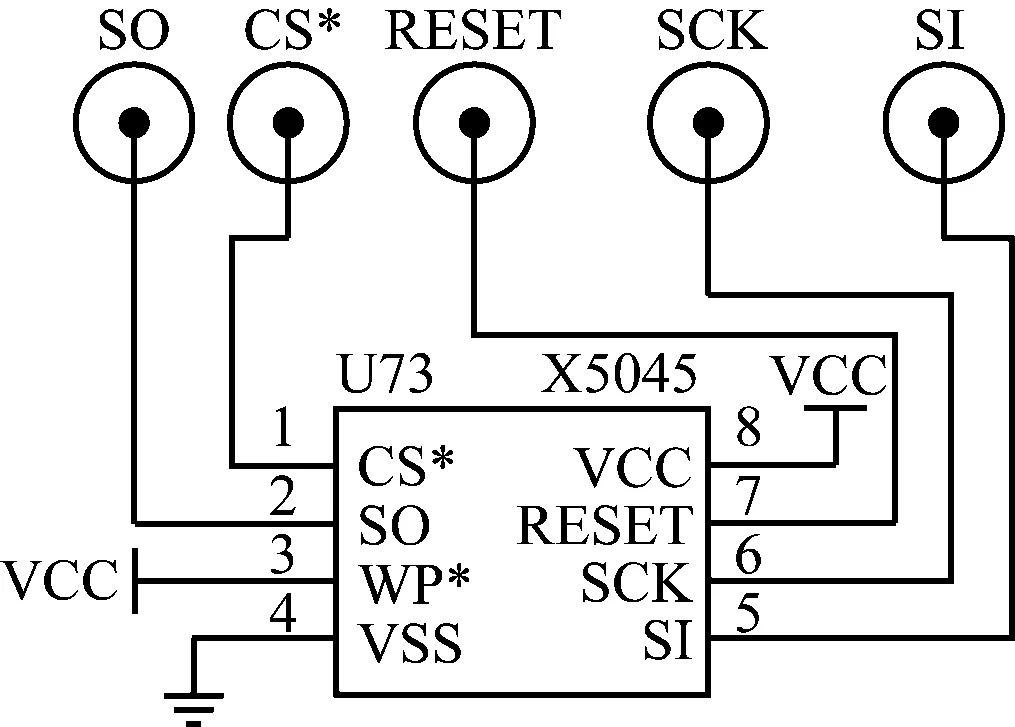
圖4 X5045實施連接原理
2.2.3 串行A/D轉換模塊該模塊應用TLC549這種8位逐次逼近式A/D轉換器,內部主要由系統時鐘、8位A/D轉換器、控制邏輯電路等部分組成。TLC549共設置IOCLK及片選(CS*)這兩個控制輸入組成,如果CS*處在高電平狀態,DOUT為高阻態且I/O時鐘受到禁止。而當CS*轉變成低電平,前次轉換操作中最高有效位(MSB)會出現在DOUT端。A/D實施連接原理,如圖5所示。
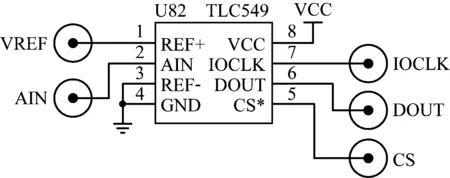
圖5 A/D轉換器連接操作原理
2.2.4 串行D/A轉換模塊
該模塊采用的TLC5620作為具備緩沖基準輸入端的四路8位電壓輸出D/A轉換器,所輸出的電壓選取一倍或者兩倍基準電壓。器件具有上電復位功能,保障設備可以重復啟動。DAC寄存器作為雙緩沖模式,其包含兩級鎖存器,從而支持完整的新數值寫入設備,隨之DAC由LDAC端實現控制和更新操作。
2.2.5 并串轉換模塊
該模塊采用74HC165芯片,如果移位/置入控制端(PL)處在低電平條件下,并行數據會被置入寄存器內,這種情況與時鐘(CLK1、CLK2)、串行數據(SER)存在密切的聯系。若PL屬于高電平,并行置數功能遭到禁止。同時,CLK1與CLK2功能屬于等價的,支持交換使用。如果CLK2、CLK1存在一個低電平,且PL處在高電平狀態,另一個時鐘能夠進行輸入。本系統通過CLK2實現接地,留出CLK1時鐘輸入,如圖6所示。
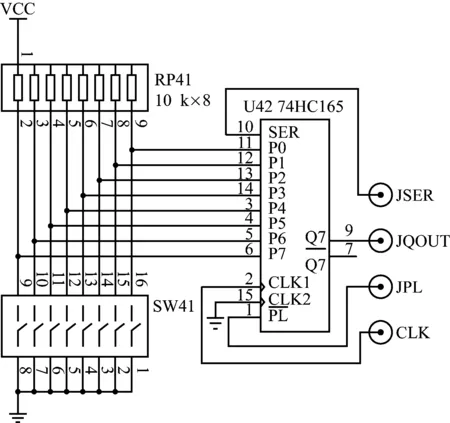
圖6 74HC165芯片連接實現原理
2.2.6 串并轉換模塊
這個模塊所用74HC164作為8位邊沿觸發式寄存器,數據實現串行輸入和并行輸出。數據利用A或者B這兩個輸入端中的一個實施串行輸入。任何一個輸入端可當做高電平使用端,并對另一輸入端數據輸入進行恰當的控制。此外,也可以將兩個輸入端連接起來,或把不使用的輸入端與高電平進行連接,不可處于懸空狀態,74HC164連接原理,如圖7所示。

圖7 芯片連接原理圖
3 總結
綜上所述,本次研究所用Freescale 32位微控制器MCF52234當做主控制器,與外圍實驗器件相結合,設計相應的32位微控制器實驗系統。本次設計的32位微控制器實驗系統主要包含LCD顯示模塊、以太網通信模塊、串行通信模塊等,便于開發人員靈活選擇和應用。同時,系統還通過直流電機、IC卡等設備進一步豐富實驗內容,有利于開發人員公共實驗系統熟練掌握32位微控制器相關開發技術。而開發的系統支持用于32位微控制器實驗教學及課程設計方面,也支持8位和16位微控制器實驗教學需求。
[1] 肖娟,張雯霧,王嵩,等.虛擬實驗系統在計算機組成原理實驗教學改革中的應用[J].計算機教育,2014(14):33-36.
[2] 張春明,楊天鴻,王青,等.主被動立體混合式虛擬現實實驗教學系統的設計與實現[J].微型電腦應用,2015,31(9):60-62.
[3] 陸熊,黃曉梅,周翟和,等.基于MCS-51和ARM的通用嵌入式綜合實驗系統[J].中國現代教育裝備,2017(15):5-7.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
