智能摳苗機(jī)器人
2018-06-23 03:35:02山東省肥城市泰西中學(xué)高二15楊書翰
發(fā)明與創(chuàng)新 2018年30期
文 山東省肥城市泰西中學(xué)高二(15)班 楊書翰
在我國(guó),棉花、花生等農(nóng)作物的種植管理都采用膜下播種、膜上摳膜放苗的形式。目前國(guó)內(nèi)對(duì)摳膜機(jī)械的研制依然處于空白狀態(tài),絕大多數(shù)的摳膜任務(wù)依然需要人工完成,勞動(dòng)力成本高、生產(chǎn)效率低。
針對(duì)此問(wèn)題,我研制了一款基于顏色識(shí)別智能摳苗機(jī)器人的原理機(jī),為摳苗機(jī)械的研制提供思路。
一、工作原理
智能摳苗機(jī)器人以循跡小車為主體,在循跡小車前端安裝綠色傳感器和自主設(shè)計(jì)的定點(diǎn)切割執(zhí)行機(jī)構(gòu),由單片機(jī)構(gòu)成的中央處理系統(tǒng)處理各個(gè)傳感器發(fā)來(lái)的檢測(cè)信號(hào),并做出命令反應(yīng)。
1.循線行走原理
在地膜上噴涂一條黑色標(biāo)示線,安裝在循跡小車前端的一對(duì)紅外傳感器分別處于黑色標(biāo)示線的兩側(cè),并不斷發(fā)射紅外線。
前進(jìn)中的小車發(fā)生偏移時(shí),相應(yīng)一側(cè)紅外傳感器發(fā)出的紅外線被地膜黑線吸收,單片機(jī)檢測(cè)不到該側(cè)反射回來(lái)的紅外線,單片機(jī)發(fā)出控制信號(hào),降低該側(cè)行走電機(jī)的轉(zhuǎn)速,將航向調(diào)正確,實(shí)現(xiàn)自主巡線行走。實(shí)驗(yàn)過(guò)程如圖1所示。
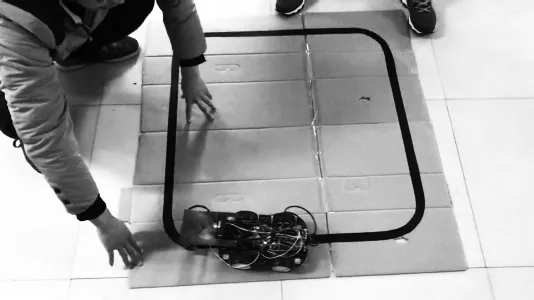
圖1 機(jī)器人自動(dòng)循線實(shí)驗(yàn)
2.幼苗識(shí)別和定點(diǎn)摳膜放苗原理
在機(jī)器人前端安裝綠色傳感器,當(dāng)綠色傳感器移動(dòng)到幼苗上方時(shí),反射的綠色光線進(jìn)入傳感器,改變傳感器的輸出信號(hào)。此時(shí)單片機(jī)檢測(cè)到信號(hào)的改變,將發(fā)出命令控制機(jī)器人停止行駛,并給摳苗執(zhí)行機(jī)構(gòu)的電磁推拉桿線圈施加電壓,使推拉桿下落。推拉桿下端連接的直流電機(jī)帶動(dòng)高速旋轉(zhuǎn)的割膜刀片下壓,完成膜上開孔放苗作業(yè)。
二、結(jié)構(gòu)設(shè)計(jì)
基于顏色識(shí)別智能摳苗機(jī)器人整體結(jié)構(gòu)如圖2所示。
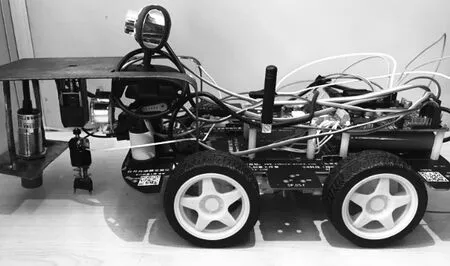
圖2 智能摳苗機(jī)器人實(shí)物圖
1.智能小車的選用
經(jīng)過(guò)對(duì)比,本文選用市場(chǎng)上技術(shù)較成熟的智能循線機(jī)器人小車,此款小車可以實(shí)現(xiàn)程序的二次燒錄,便于對(duì)機(jī)器人的進(jìn)一步開發(fā)。
2.切割執(zhí)行機(jī)構(gòu)
切割執(zhí)行機(jī)構(gòu)是智能機(jī)器人的核心部件,它包括電磁推拉桿、減速電機(jī)和切割刀片,如圖3所示。當(dāng)遇到綠色點(diǎn)位時(shí),切割刀片下降切割作業(yè),離開時(shí)刀片上升。為完成這一工作,我運(yùn)用了電磁推拉桿。電磁推拉桿下端綁定帶有切割刀盤的減速電機(jī)。

圖3 定點(diǎn)切割執(zhí)行機(jī)構(gòu)
三、編程
程序是整個(gè)智能摳苗機(jī)器人的靈魂,沒有合理有序的程序,小車就無(wú)法完成預(yù)先設(shè)定的工作。
1.設(shè)定工作流程
智能摳苗機(jī)器人依靠前端的紅外傳感器接收信號(hào),沿預(yù)設(shè)的黑色線路循跡行駛,紅外傳感器觸碰黑線時(shí)接收不到反饋信號(hào)。在黑線之外時(shí),可以接收到反饋信號(hào)。
黑線旁邊每隔一段距離分布有代表綠色幼苗的綠色涂點(diǎn),當(dāng)小車前方的顏色傳感器識(shí)別到綠色后,小車自動(dòng)停止3s。在此時(shí)間內(nèi),摳苗執(zhí)行機(jī)構(gòu)完成下降、切割、上升的工作流程。
2.小車的程序
程序框圖如圖4所示。
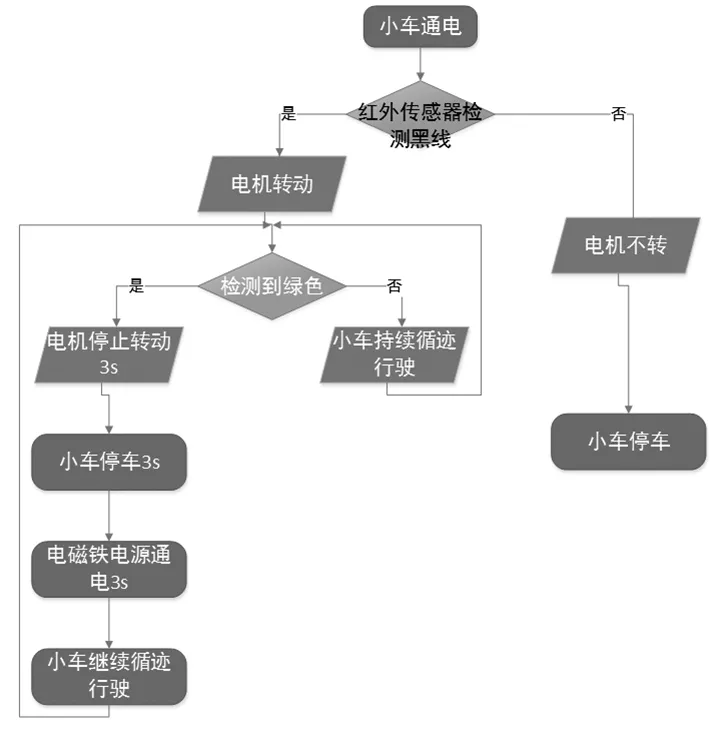
圖4 基于顏色識(shí)別的智能摳苗機(jī)器人工作程序圖
多次試驗(yàn)表明,基于顏色識(shí)別的智能摳苗機(jī)器人完全可以按照預(yù)設(shè)的流程工作,執(zhí)行機(jī)構(gòu)工作流暢,整機(jī)系統(tǒng)運(yùn)行平穩(wěn)。
猜你喜歡
品牌研究(2022年26期)2022-09-19 05:54:46
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
海峽姐妹(2019年3期)2019-06-18 10:37:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30