基于北斗衛星導航系統的汽車智能限速系統的研究
2018-06-25 08:16:26李量宇于淼堯泮澤鋅
汽車實用技術 2018年11期
李量宇,于淼堯,泮澤鋅
(長安大學汽車學院,陜西 西安 710064)
引言
隨著汽車行業迅速發展,交通事故發生率也在逐漸上升。據統計,在眾多導致死亡交通事故的原因中,超速“名列前某”。與此同時,北斗事業發展迅速,北斗導航技術在交通運輸、林漁業、電信、測繪、氣象等方面日益普及,北斗導航系統的實用性備受青睞。根據國內外統計資料,道路交通事故的成因中,超速行駛和車輛縱向間距不夠占有較高的比重,兩類合計占到交通事故成因的18%以上。目前,市面上有多種汽車限速系統,且在一定程度上減少了交通事故的發生。經研究發現,傳統的汽車限速系統只是針對一臺車,而沒有使車與車之間建立聯系,因此存在不能根據實時路況限制車速的弊端,一定程度上限制了限速系統的靈活性和智能化發展。本文從將北斗衛星定位與汽車限速結合的角度出發,不僅可以實時測量車輛的行駛速度,還可通過北斗衛星定位系統實時測量前后車的間距,并在車速超過道路限速或者兩車行駛的安全距離的情況下,發出聲光警告,提示汽車駕駛員降低車輛行駛速度。在警告發出后若駕駛員沒有在規定時間內采取減速措施,該系統會主動降低車速。
1 系統框架
本系統基于北斗導航定位系統,通過車載傳感器采集信息、主控芯片處理信息以及執行機構采取措施等實現汽車的主動限速。
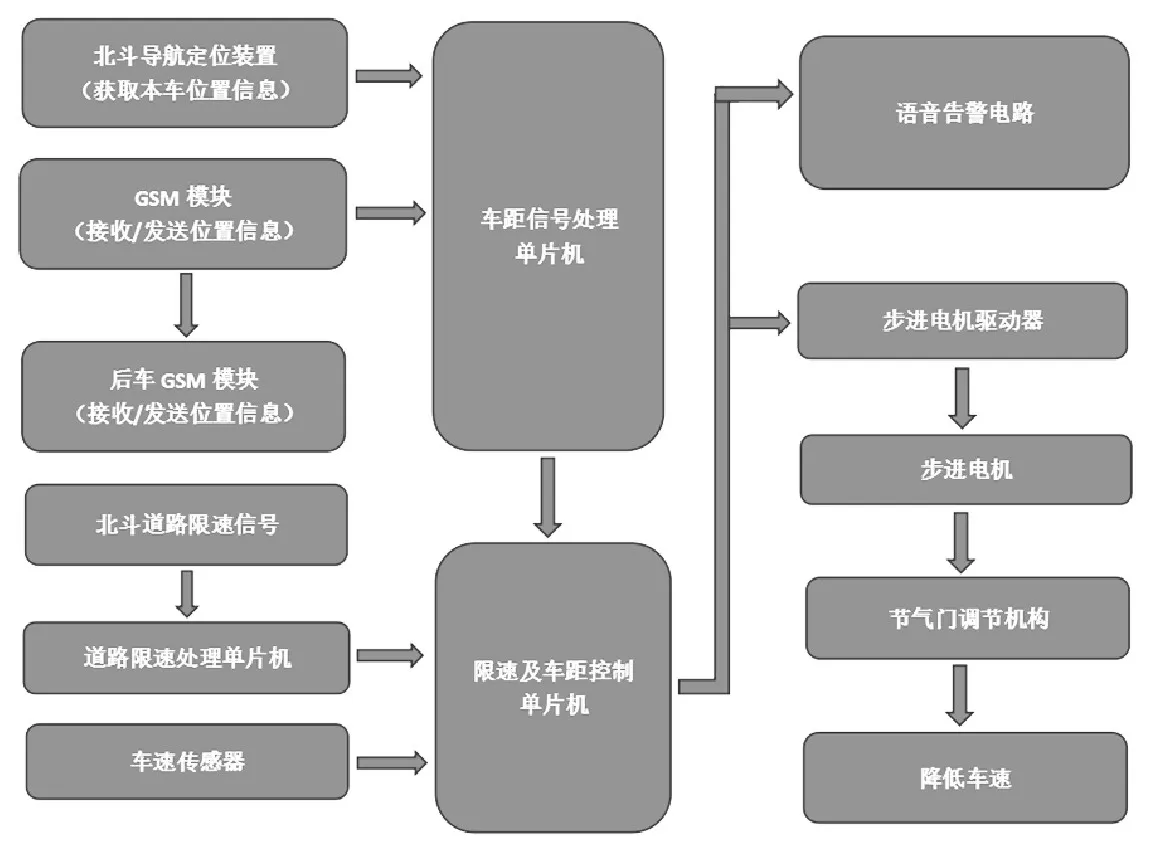
圖1 系統總框架
2 系統功能介紹
圖1給出了系統總工作流程框圖,下面結合各部分功能,論述系統工作流程。
2.1 車速檢測與控制
圖2 中,為了檢測和控制車速,需要通過安裝在汽車上的北斗導航定位裝置接收道路限速信息,以此作為判斷是否超速行駛的基本依據。車速檢測與控制裝置用于實時檢測車輛行駛速度和自動實施車速控制。
2.2 車距檢測與控制

圖3 安全行駛車距計算流程圖
圖3中,為了計算安全車距,在車上設置車距信號處理單片機,并由GSM作為車輛位置信號的接收和發送裝置,車距的控制是通過降低車速的方式間接實現增大車間距離的目的。同時,在車內設置的車距檢測與控制裝置,用于實時檢測車輛行駛速度、計算安全車距和實施車距控制。

圖4 車距檢測與控制流程圖
車速控制系統與車距控制系統中,對延遲時間的設定比較關鍵。通過研究分析,設定的限速控制延遲時間為 5s,車距控制延遲時間為 1s。
2.3 車輛定位信息的接收/發送

圖5 GSM無線傳輸流程圖
GSM無線傳輸流程圖如圖5所示,本系統的GSM模塊接收前車發來的車輛位置信息,然后有線傳輸給車距信號處理單片機處理,車距信號處理單片機將得到的車距信息傳給下一處理器,而將本車的車輛位置信息借助GSM模塊無線傳輸給后車,由后車相同的GSM模塊接收,這樣后車就可以獲取來自前車的位置信息。
3 結語
隨著每年汽車保有量的增加,道路變得更加擁擠,為保障人們的安全出行,對行駛車速的限制顯得尤為重要。本文提出了一種基于北斗導航的智能限速系統,從車輛周圍環境的角度出發,利用北斗衛星出來的道路限速信息和定位信息,通過車與車之間的聯系,將車距作為限速的依據之一,從而將實時路況的一部分加入到汽車限速系統中來,進一步提升了汽車限速系統的可靠性,這對于汽車智能化和網聯化的發展具有重要意義。
[1] 史順玉.基于北斗衛星導航系統的智能車載終端設計[D].青島:中國海洋大學,2014.
[2] China Satellite Navigation Project Center.Compass/Beidou Naviga tion Satellite System Development[R]. Beijing: CSNPC,2009.
[3] FENG Y, LI B.A Benefit of Multiple Carrier GNSS Signals: Regi onal Scale Network-based RTK with Doubled Inter-station Distan-ces[J].Spatial Science,2008.
[4] 汪翼舟.基于北斗的車載定位系統的設計[D].武漢:武漢郵電科學研究院,2016.
[5] 陳倩詒,陳再清.汽車自動限速系統設計[J].計算機測量與控制,2006.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中外會展(2014年4期)2014-11-27 07:46:46
決策探索(2014年21期)2014-11-25 12:29:50
祝您健康(1987年3期)1987-12-30 09:52:32