兩工位近似停歇往復接送苗機構分析與試驗
2018-06-25 08:31:46夏旭東章鵬華陳建能
裝備制造技術 2018年4期
關鍵詞:分析
夏旭東 ,章鵬華 ,陳建能 ,2
(1.浙江理工大學機械與自動控制學院,浙江 杭州 310018;2.浙江理工大學浙江省種植裝備技術重點實驗室,浙江 杭州 310018)
目前在大型農田蔬菜移栽種植過程中,全自動移栽機占了大部分,其中接送苗機構在移栽過程中是取苗、送苗、栽植的中間步驟,起到對缽苗移栽的承上啟下作用[1-4]。市場上一款FPC型全自動移栽機應用廣泛[5],該移栽機的接送苗機構由一個曲柄滑塊機構和接苗嘴組成,工作時,接苗嘴在滑塊的帶動下做往復運動。滑塊的兩個極限位置分別為接苗和送苗位,滑塊在接苗位時接苗嘴為閉合狀態,接住輸送而來的缽苗;滑塊在送苗位時,接苗嘴被一凸輪頂開,處于打開狀態,此時的缽苗自由落入栽植嘴中,進入栽植工序。由曲柄滑塊機構的運動特性可知,滑塊在接送苗兩個位置的不存在停歇時間,易出現接苗失敗,送苗錯位的情況,降低了移栽成功率。
本文針對該送苗機構的缺點,提出一種由行星齒輪-連桿滑塊組合機構實現移栽機的接送苗[6-8],分析了這套組合機構的運動學特性,并在基礎上進行桿件參數優化和試驗,目的在于令接苗嘴在兩個極限位置能有足夠的慢動近似停歇時間,提高接送苗成功率。
1 行星齒輪-連桿滑塊組合機構的工作原理
基于行星齒輪-連桿滑塊組合機構的接送苗機構原理示意圖如圖1所示,該機構為兩自由度機構,其輸入構件分別為主動齒輪1和行星架2.機構運轉時,兩個輸入構件同時提供動力,連桿通過行星齒輪5上的鉸鏈連接,由該連桿推動與接苗嘴固聯的滑塊往復移動,接苗嘴在往復移動至極限位置時,通過凸輪11打開接苗嘴將缽苗落入下方的栽植嘴內。對該機構的參數優化目標,就是得到行星齒輪與滑塊連桿組合機構在一個周期中極限位置產生近似停歇的效果,提高接苗送苗成功率。

圖1 行星齒輪-連桿滑塊組合機構示意圖
2 行星齒輪-連桿滑塊組合機構的運動學分析
為便于表達,現將機構各參數符號代表的含義列于表1.根據周轉輪系動比計算方法[9]有以下關系式成立:

于是行星輪4的轉角為:


表1 分析符號說明
連桿在行星輪上鉸鏈點的位移計算公式如下:

于是可得連桿與滑道的夾角計算公式:

進而得到滑塊水平位移計算公式如下:

對公式(6)求一階導數并化簡得到滑塊的移動速度如下式(7),該公式已做變換,最終將滑塊的移動速度僅用連桿在行星輪上鉸鏈點移動速度和連桿與滑道的夾角來表達,為下一步的機構參數優選提供數學計算模型:

3 機構的運動參數設計
3.1 機構運動特性分析軟件
采用Matlab GUI編程開發機構運動特性分析軟件,配合人機交互的方法,程序計算得到機構的不同參數下輸出接苗嘴在一個往復運動周期內的位移、速度和加速度的值,畫出曲線供選擇。該軟件界面如圖2所示。軟件的主要輸入參數有:齒數z3,齒數z4,模數m,偏距H,偏距h,連桿長度L,初始相位角θ0、θ1,太陽輪與行星架的轉速比i3H等。通過不同的參數組合計算,探索該機構的輸出構件滑塊移動速度的主要影響參數。

圖2 優化分析軟件
3.2 參數設計目標與結果
根據移栽農藝要求,接苗嘴的停頓特性要滿足如下兩個要求:(1)水平位移長度 550 mm;(2)在接苗、投苗位置可以有5 mm的慢速移動,而在空行程需要的速度較高。在第2節中已經對各參數最終對接苗嘴的移動位移和速度的影響做了分析,現通過不斷調整參數得到一組相對較佳機構參數:z3=50、z4=50、m=3 mm、i3H=-1、H=25 mm、h=25 mm、L=730 mm、n2=46 rpm、θ0=270°、θ1=270°,得出一條在兩極限位置有一定行程的近似停頓特性的接苗嘴位移曲線(圖3)。在相同轉速條件下,將這組參數下送苗機構的接苗嘴與原有接苗設備上接苗部件的位移曲線進行對比(圖4(a)),可以看到改進后接苗嘴在移動過程中,運行到兩個極限位置的停頓時間明顯延長。
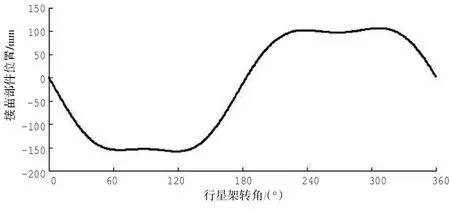
圖3 接苗嘴水平位移曲線

(續下圖)
(接上圖)

圖4 新機構和原有機構的接苗嘴位移和速度曲線對比
由于接苗嘴的上端開口尺寸較大,因此在移栽作業中,雖然接苗嘴在兩極限位置存在5 mm左右的移動(位移曲線的上下微小波動),但是這并不會影響接苗成功率。圖4(a)表明改進后的接苗嘴在兩極限位置近似停頓行程中,對應行星架的轉角大約為77°,與改進前的機構比較(行星架只轉過29°)改進后接苗嘴在兩個極限位置近似停頓時間達到改進前的2.5倍;從圖4(b)看出,在速度分布上,改進后的機構在近似停頓期間接苗嘴移動速度慢,而其他行程則移動速度快。以上兩個特性均滿足了接苗嘴運動規律的要求。
4 機構裝置設計與試驗
4.1 接苗機構的三維設計與仿真
為了得到接苗嘴的實際運動位移曲線,需要進行三維設計并制作物理裝置進行測試。由第3節內容得到機構的主要設計參數,結合一定的零件結構工藝性要求以及工作空間的限制,采用三維設計軟件建模,并將三維實體模型導入ADAMS虛擬仿真軟件進行裝配(圖5)。在ADAMS中為裝配體添加相應的約束和驅動后進行虛擬仿真,最終在可以到接苗嘴的仿真運動位移曲線(如圖6),由圖可知仿真位移曲線與前述理論模型計算得到的位移曲線較為吻合,體現了理論模型建立的正確性,以及試驗機構的結構設計是可行,滿足理論計算要求。
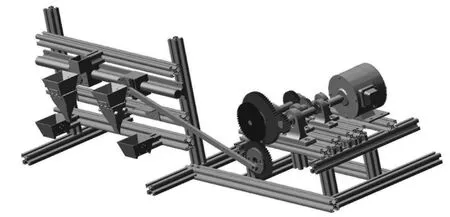
圖5 機構虛擬裝配圖

圖6 接苗嘴仿真運動位移曲線
4.2 接苗機構實物裝置制作與試驗
通過裝配體的虛擬仿真的結果可知制作該接苗裝置的結構設計是可行的,為了試驗實際運轉情況,加工裝配了一套接苗機構裝置(圖7)。為方便測試,采用調速電機驅動,考慮到應排除接觸式測量可能引入運動干擾,這里使用了一臺高速攝像作為數據采集記錄設備,通過圖像處理軟件分析接苗嘴的運動情況,真實地反映接苗嘴的運動特性。

圖7 接苗機構裝置圖
圖8 根據圖像試驗分析的要求,在接苗嘴上與連桿相連的鉸鏈處預先貼上識別標記塊,并設置好外置光源,保證高速攝像時(曝光時間極短)有足夠的清晰度,預設試驗參數為:電機轉速調整至滑塊每分鐘往復運行40次,高速攝像機采集頻率為200幀/s,攝像記錄機構一個周期的運行時間。將采集到的視頻導入專業圖像分析軟件Blaster’s MAS中,捕捉標記點并自動描出標記點的軌跡線,根據已知采樣頻率可計算出標記點的行星架轉角-位移曲線。繪制出曲線如圖9所示。

圖8 接苗嘴標記塊

圖9 位移曲線
4.3 結果曲線分析
將高速攝像實測位移曲線與前述的Matlab理論計算值以及ADAMS仿真值列入同一坐標系下進行對比,如圖10所示。

圖10 理論、仿真與試驗后接苗部件位移曲線對比
由圖可知,Matlab理論計算值以及ADAMS仿真值幾乎完全吻合,實測所得曲線在初始一段行程亦是吻合,但是在行星架轉角110°位置處開始與理論計算值曲線分離,有正偏差也有負偏差,最終在末端又重合。并且接苗嘴的位移幅度在行程的兩個末端都有所增大,現分析造成這些偏差的主要的原因:
(1)機構裝置的零件加工誤差以及裝配誤差,為便于裝配,加工過程中對相關配合零件采用松配合工藝要求,故裝配后相互之間有配合間隙,造成往復運動中存在竄動量。
(2)輪系機構的齒側間隙的影響,由于曲柄滑塊機構的曲柄與行星齒輪固聯,因此通過一系列的齒輪傳遞動力至機構末端后,齒側間隙會造成很大的影響,當接苗嘴滑塊從右極限位置始發開始往左端開始運行時,連桿對行星齒輪有一壓力,整個機構的間隙預先消除,但是當接苗嘴滑塊運行至左端極限位置觸碰凸輪打開接苗嘴之后,滑塊即將往右端回行(行星架轉角110°左右),此時連桿受拉,行星齒輪齒側間隙開始影響滑塊行程,造成了位移的偏差,直到下一個周期開始方消除這個偏差。
(3)圖像處理軟件的目標點拾取誤差,像素點的區域范圍內拾取標記點必定存在偏差,但是這是在理論范圍內的,引起的偏差不大。
針對以上分析,為改善試驗結果,可以采取如下幾方面改進措施,提高試驗臺裝配精度,對慣性力進行平衡,再次還可根據實際情況人為修正設計參數,經過不斷測試,得出一組實際運行良好的機構參數為:z3=48、z4=48、m=3、i3H=-1、H=-100 mm、h=25 mm、L=730 mm、n2=46 rpm、k1=270°、k2=270°,其接苗嘴的運動特性曲線如圖11所示,可以看這條曲線較最佳參數曲線的近似停頓時間短,但是減少了過沖行程,使得最終的效果好,接苗位置更準確。
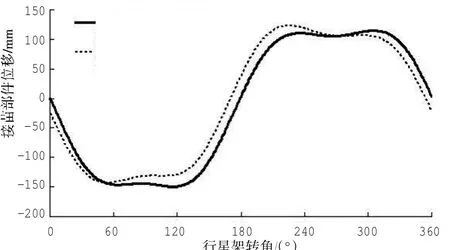
圖11 最佳參數與修正參數曲線對比
5 結束語
通過對原有機構的分析,無停歇的往復運動是接苗失敗率高的主要原因,本文通過對接苗嘴所需運動規律的探索,采用行星輪系-曲柄滑塊機構,建立運動學模型,編寫計算機分析軟件,通過人工調整參數優化得到一組比較好的機構參數,并在虛擬仿真以及實物裝置的測試下,結果表明這組參數下機構較原機構在左右接苗落苗位置近似停頓時間達2.5倍,滿足接苗工藝要求。并通過分析實測曲線誤差原因,采取修正措施,增大參數H,減小參數z3、z4,達到最佳實物機構的運動特性要求,同時該理論-修正法也為其它機構設計提供了參考。
[1]張振國,張寧寧,呂全貴,等.頂夾組合式全自動移栽機的設計研究[J].新疆農機化,2016(06):16-18,45.
[2]盧勇濤,李亞雄,劉 洋,等.國內外移栽機及移栽技術現狀分析[J].新疆農機化,2011(03):29-32.
[3]張 冕,姬江濤,杜新武.國內外移栽機研究現狀與展望[J].農業工程,2012,2(02):21-23.
[4]于曉旭,趙 勻,陳寶成,等.移栽機械發展現狀與展望[J].農業機械學報,2014,45(8):44-53.
[5]陳寶成,尹大慶,呂 程,等.移栽農機具概況與發展思考[J].農機化研究,2015(3):258-263.
[6]王進紅,劉 峰,王東榮,等.曲柄滑塊式煙苗移栽機栽插機構運動分析[J].中國農機化學報,2014,35(05):17-22.
[7]趙宏政,曹衛彬,唐海洋,等.移栽機取苗機構行星輪系設計與動力學研究[J].農機化研究,2017,39(03):47-52.
[8]張振國,呂全貴,陳青云,等.盆栽花卉移栽機取苗機構的現狀分析[J].江蘇大學學報(自然科學版),2016,37(04):409-417.
[9]鄭文緯,吳克堅.機械原理[M].7版.北京:高等教育出版社,1997.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
