
基于毫米波雷達的汽車預警系統
2018-06-28 05:36:06金李揚吳迪晏桂喜李鑫崔建國
時代汽車 2018年5期
金李揚 吳迪 晏桂喜 李鑫 崔建國
合肥工業大學汽車與交通工程學院 安徽省合肥市 230009
1 引言
隨著智慧交通、無人駕駛的普及,汽車防撞系統的研究有重大的意義。毫米波汽車防撞雷達作為組成系統的重要部件已成為當今世界汽車防撞控制系統的主流研究趨勢,擁有廣闊的市場和應用前景。
本文提出的毫米波雷達汽車預警系統方案,用工作體制為線性連續三角波的雷達和相應的處理算法得到對當前汽車安全狀態的評估,顯著提升了汽車的安全性能。
2 毫米波雷達汽車預警系統原理
2.1 毫米波雷達測距測速原理
毫米波雷達使用毫米波,其波長較短為1mm到10mm。其中24GHz和77GHz毫米波雷達主要用于汽車防撞。毫米波波頻范圍很寬,波束很窄,分辨率較高,在其傳播時的衰減小,受自然光和熱輻射源影響小。相較于激光等光學傳感器,毫米波雷達受天氣影響較小,抗干擾能力強,具有全天候的特點[1]。
結合信號處理的難度、測量距離等情況綜合考量,LFMCW體制是汽車防撞雷達的首選。其在調制周期內,雷達的載頻呈現線性變化,常見的變化方式有三角波、鋸齒波。其中三角波是最常用的調制方式。這種雷達調制方式濾波簡單,沒有盲區。其最大優點是可以通過發射信號和反射信號的差頻,得到本車與目標的相對距離和相對速度,并且信號處理過程比較簡單[2]。
本文以LFMCW為雷達工作體制,圖1中,三角波周期為T,調制帶寬為B,△t為回波信號與發射信號的時間間隔:

調制信號中心頻率為 ,則運動目標的多普勒頻移:

fb為靜止目標回波信號與發射信號的頻差,fb+為運動目標回波信號在上掃頻段與發射信號的頻差,fb-為運動目標回波信號在下掃頻段與發射信號的頻差,則有:
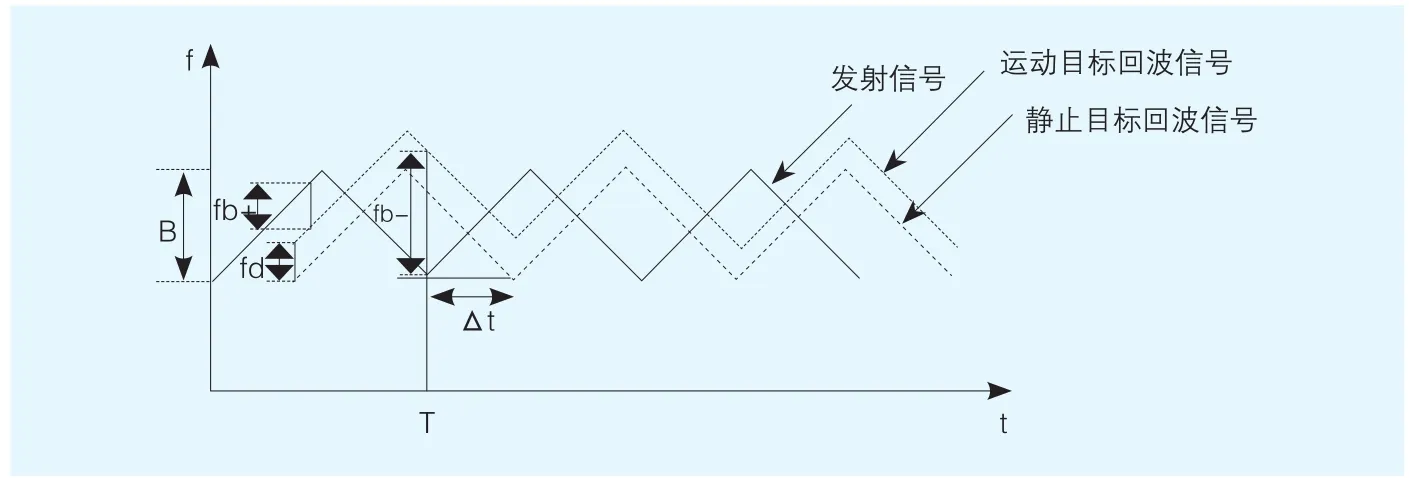
圖1 LFMCW毫米波雷達原理圖

根據圖1中的幾何關系有:

由(1)、(2)、(3)、(4)、(5)式可得:
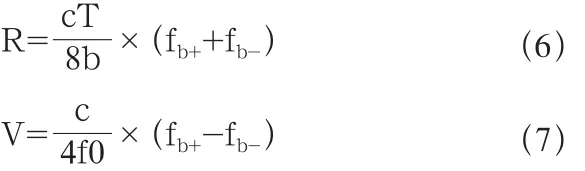
根據上文的分析,可以得出本車與目標的相對距離和相對速度的公式,其對相對靜止和相對運動目標均適用。在實際應用中,只需要對雷達輸出的中頻信號進行時域和頻域上的分析得出fb+和fb-的值,即可得到相對距離和相對速度。
2.2 系統性能與參數設定
本次設計采用的是24GHz毫米波雷達傳感器KEH255,該傳感器內置PLL型號為ADF4158,支持FMCW調制。根據汽車防撞系統測距120m測速35m/s的要求和雷達本身性能要求確定以下參數:三角波調制周期2ms、調制信號帶寬150MHz、信號中心頻率24.155GHz、抗混疊濾波器截止頻率為120KHz、單片機ADC采樣頻率為250KHz。對于1024點FFT,理論上距離分辨率為0.24m,速度分辨率為0.76m/s。
以上即為系統的性能和相關參數設定,涉及到雷達的參數設定需要操作雷達內部的ADF4158,ADF4158是射頻帶寬6.1 GHz的具有調制和波形產生功能的數分頻頻率綜合器,在每次雷達開機時單片機用SPI時序燒寫調制的波形參數到ADF4158的寄存器中[3],進而可確保雷達正常運行。
2.3 距離安全模型
如圖2道路中行駛的兩輛汽車,其中本車表示裝有毫米波雷達汽車預警系統的車輛,前車表示前方目標車輛。如果本車車速大于前車,則可能會相撞。下圖中 表示兩車相撞的臨界距離, 表示本車從提示減速開始到與前車車速相等時本車行駛的距離, 表示前車從提示減速開始到兩車車速相等時前車行駛的距離, 表示本車提示減速前的行駛速度,表示前車的行駛速度,其速度一直不變, 表示本車從提示減速開始到開始剎車的時間,即為駕駛員反應時間和剎車系統延時, 表示本車從開始剎車到與前車車速相同的時間。
根據運動學公式有:
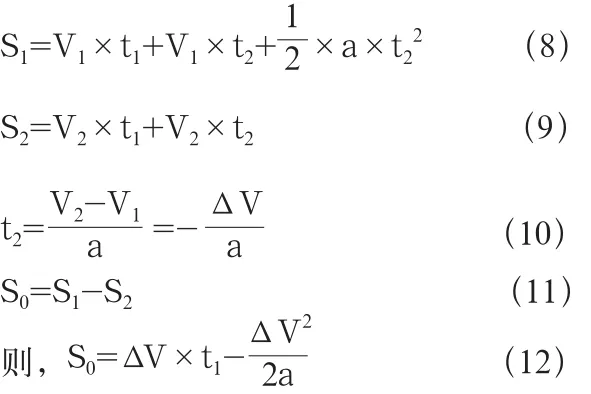
在(12)式中,t1可根據實際情況估計為1.6s,汽車在平直路面上剎車時加速度范圍正常在0.6g到0.8g之間,式中a取-6m/s2,即 。將 與汽車間相對距離比較,若相對距離小于臨界距離則報警提示減速。
3 毫米波雷達汽車預警系統的設計和實現
3.1 系統介紹
本設計采用基于毫米波雷達來實現汽車防撞預警系統。采用STM32F1作為主控單元,搭建有毫米波雷達、低通濾波器、電源、屏幕、LED、存儲等硬件。其中主控單元主要用來處理中頻信號的算法和實現其它邏輯功能;毫米波雷達是檢測相對速度和相對距離;低通濾波器進行抗混疊濾波;屏幕和LED模塊進行危險時的報警。通過算法來進行信號處理,其中包括ADC采樣、FFT、恒虛警檢測、頻率匹配等算法。ADC采樣算法和FFT算法實現信號時域到頻域的轉換;恒虛警檢測保證檢測概率和虛警概率在性能上達到一個平衡;頻率匹配對恒虛警檢測后的頻譜進行匹配,得出目標相對速度距離。最后利用安全模型對處理結果進行判別,有撞擊的可能則利用屏幕和LED進行提示。
圖2 汽車預警系統距離安全模型
3.2 中頻信號處理
毫米波雷達傳感器中頻信號的前級處理的好壞對于整個系統的測距測速的準確性和測距范圍有很大的影響。根據奈奎斯特定理,采樣頻率必須大于信號中最大頻率的兩倍,得到的數字信號才能完整的保存原始信息[4]。遠距離(大于120m)汽車的反射信號衰減較大,此時雷達輸出的中頻信號很難處理,而且環境和雷達中包含高頻噪聲。由于ADC采樣頻率的限制,需要截止頻率為120KHz的低通濾波器在采樣前濾除中頻信號中的高頻信號。
為了采樣頻率大于信號中最大頻率兩倍的條件,設置ADC采樣頻率為250KHz。在設計單片機程序時采用的是DMA傳輸ADC數據到內存中,提高系統實時性,并利用DMA中斷進行1024點FFT以及后續的中頻信號處理。
下面以一個目標為例,其以約10m/s的速度遠離靜止的預警系統,記錄相距40m時的數據,并用MATLAB繪圖。
ADC采樣的信號圖形如圖3,其橫軸為時間,縱軸為ADC采樣數值。可見雷達輸出的中頻信號在時域上是近似方波,通過波的頻率記錄距離和速度信息。單片機ADC的有效位是12位,參考電壓為3.3v,故采樣數值范圍為0-4095,電壓范圍為0-3.3v。
對信號進行FFT,其頻譜圖如圖4,其橫軸為頻率,縱軸為幅值。圖中有兩個較大幅值的波峰,即為有效數據,求出有效數據對應的頻率即可求出相對距離和相對速度。
3.3 恒虛警檢測
恒虛警檢測是通過確定閾值來濾除FFT后幅值小于閾值的頻率。閾值的確定有多種方法,本設計采用的是自適應閾值的恒虛警檢測。FFT后每個數據的閾值y是根據其前后8個數據的平均值v確定,結合實際情況其關系是一次函數為y= v+500。當數據值大于閾值時,則當前數據有效,反之則無效,并將該數據值設為0。
3.4 頻率匹配及顯示
對于相對運動的目標,其上下掃頻段的兩個頻率值不同,相對靜止的目標則相同。頻率匹配的原理是同一目標上下掃頻段的兩個頻率對應的幅值具有最大相似性[5]。程序設計時,先用結構體存儲恒虛警檢測后每一個波峰的最大值和其對應的頻率,再根據幅值的大小進行排序。另外,由于多普勒頻移較小,可對排序后幅值對應的頻率進行校驗。可通過以上方式確定目標。
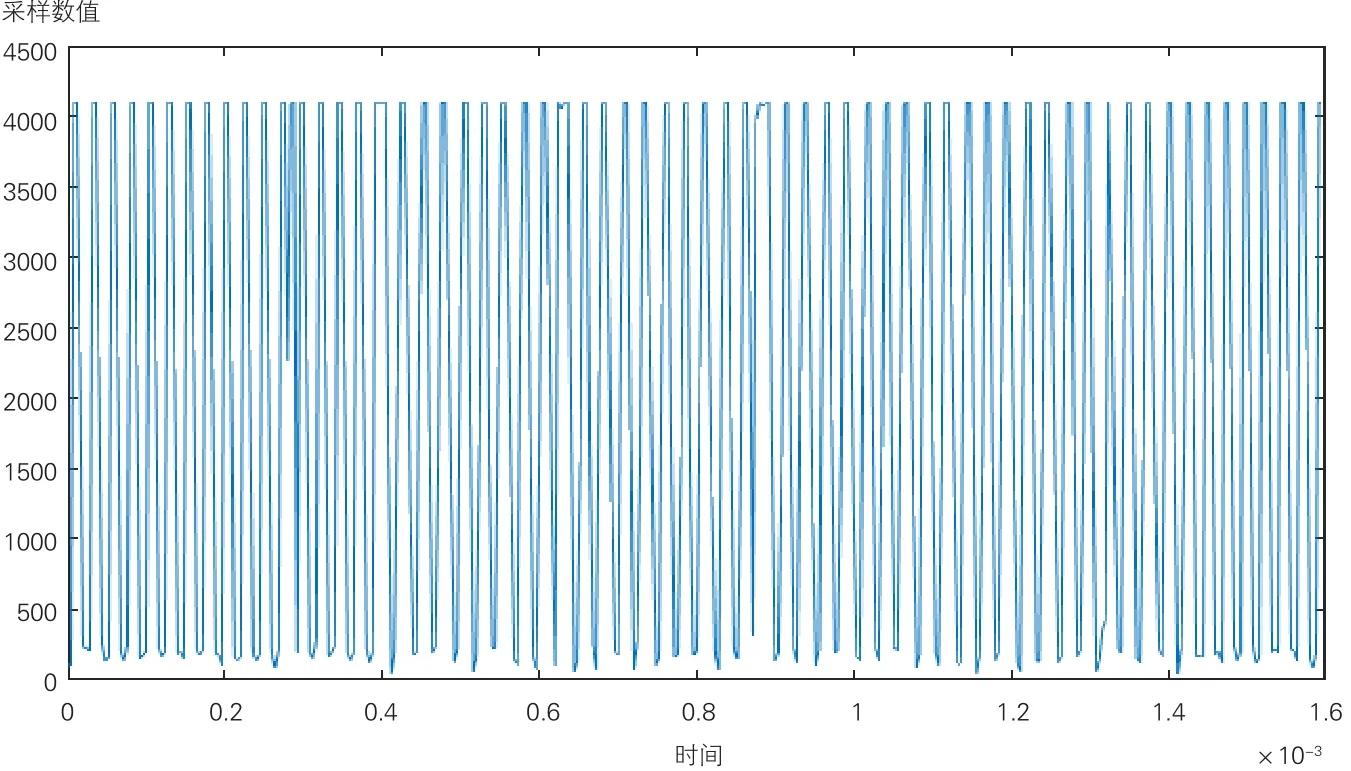
圖3 ADC采樣圖形
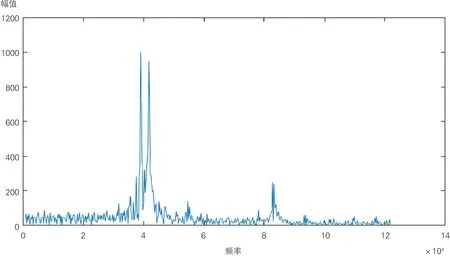
圖4 FFT頻譜圖
在測試時,數據是通過單片機的串口顯示的,圖7為串口顯示的是目標的頻率、相對距離以及相對速度。在圖5中可以看到目標相對距離為40.4m,相對速度為8.3m/s,本車速度慢于前車,當前距離安全。結合上文,其距離較準確,速度誤差約1.7m/s。理論上速度分辨率為0.76m/s,但是由于雷達傳感器的性能、系統算法以及系統電氣特性等問題很難達到理論上的分辨率。故系統的結論可以認為是準確的。
4 結語
本文設計的基于毫米波雷達的汽車預警系統,在STM32F1平臺上搭建,完成了該系統硬件和軟件測試,基本實現了汽車預警的功能。系統通過雷達傳感器獲取目標的距離和速度信息并以頻率信息表示,經過單片機處理將信號從時域變換到頻域處理,獲得目標相對距離和相對速度,再結合距離安全模型判斷當前安全狀態,若危險則提醒司機減速。但由于技術能力和時間的限制,設計的系統仍然存在一些問題,比如測距短、多目標識別誤差大、無測角功能、速度分辨率低等。隨著智能交通和無人駕駛的發展,該研究領域有很好的應用前景。
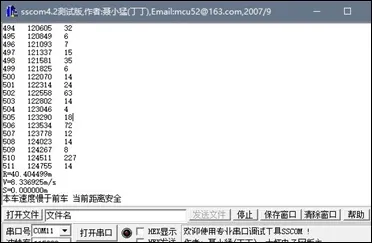
圖5 串口顯示圖
基金項目:合肥工業大學2016年國家級大學生創新創業訓練計劃項目資助(項目編號:201610359014)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15
