反魚雷魚雷全彈道數學仿真系統設計與應用
2018-06-28 11:10:38倪文璽蔣繼軍
水下無人系統學報 2018年3期
曹 萌, 倪文璽, 蔣繼軍
?
反魚雷魚雷全彈道數學仿真系統設計與應用
曹 萌, 倪文璽, 蔣繼軍
(中國船舶重工集團公司 第705研究所, 陜西 西安, 710077)
數學仿真在武器論證和研制中能夠起到優化參數匹配、評估作戰效能、預估試驗結果等作用。反魚雷魚雷自身特性決定了其彈道攔截過程較之傳統魚雷更為復雜, 基于此, 文中設計了一個反魚雷魚雷全彈道數學仿真系統, 闡述了仿真系統的功能與組成、關鍵模型和模塊, 利用典型的作戰工況進行了仿真應用, 驗證了相關模型和仿真系統的有效性。反魚雷魚雷全彈道數學仿真系統可以在考慮作戰使用的條件下對其總體性能方案進行研究, 驗證彈道動作流程、導引律、性能參數等設計的合理性, 為反魚雷魚雷的論證和工程研制提供有力支撐。
反魚雷魚雷; 全彈道; 仿真系統
0 引言
現代魚雷通過對目標特性的提取和判別, 已經能夠有效識別真假目標。在這種情況下, 聲誘餌、聲干擾器等“軟對抗”器材對魚雷的誘騙效果將會逐漸降低。反魚雷魚雷是一種積極、主動搜尋并攔截來襲魚雷的“硬殺傷”武器, 具有不同于傳統魚雷的鮮明特點和難點, 以其攔截毀傷概率高成為世界海軍水下防御的重要發展方向之一[1]。
反魚雷魚雷整個彈道攔截過程不僅是其設計中由諸多參量相互作用而成的復雜過程, 而且和作戰使用中來襲魚雷的態勢相關。反魚雷魚雷設計中每個彈道段之間緊密聯系, 其中任一參量的變化都有可能給整個武器系統的作戰效能帶來很大影響[2-3]。研究并設計高置信度的反魚雷魚雷全彈道數學仿真系統進行仿真試驗研究顯得尤為重要。文中正是在這樣的需求背景下, 針對反魚雷魚雷的作戰模擬, 建立反魚雷魚雷全彈道仿真系統, 為反魚雷魚雷的作戰使用以及反魚雷魚雷的作戰效能研究提供支撐。
1 仿真系統組成和功能
反魚雷魚雷全彈道仿真系統軟件各功能模塊組成及相關邏輯如圖1所示。從總體結構上分為人機交互、仿真模型、仿真過程控制、數據分析四大部分。可實現以下功能: 1) 支持單次仿真和統計仿真; 2) 應用通用軟件開發工具, 設計和開發系統仿真環境框架和相關仿真模型, 模型能夠獨立封裝, 可重用性強; 3) 通過靈活的作戰態勢設定, 能夠完整模擬來襲魚雷攻擊水面艦艇和反魚雷魚雷攔截來襲魚雷的全過程; 4) 通過仿真試驗, 可評估不同反魚雷魚雷射擊陣位下, 反魚雷魚雷攔截來襲魚雷的作戰效能, 分析、驗證反魚雷魚雷不同參數指標對系統性能的影響; 5) 在典型反魚雷魚雷態勢驅動下, 可對反魚雷魚雷全彈道動作流程(包括初始程序彈道、自導搜索彈道、跟蹤導引彈道和命中攻擊彈道)的設計合理性進行驗證。
2 仿真系統設計
2.1 人機交互功能設計
反魚雷魚雷全彈道仿真系統的人機界面采用QT4[4-5]開發, 顯示分辨率≥1 024×768, 界面可自適應全屏顯示及多個頁面同時顯示。同時, 人機界面符合Windows風格, 能夠按照試驗場態勢和實航試驗任務書形式設置仿真初始態勢, 根據設定態勢對人機界面進行適配。界面執行流程如圖2所示, 啟動軟件后進入仿真實體性能參數配置, 配置完成后, 進入仿真模式選擇, 仿真模式分為單次仿真和統計仿真, 進入相應模式初始界面后, 開始執行仿真流程。
1) 界面1: 仿真實體性能參數配置如圖3所示, 包括反雷性能參數、來襲雷性能參數和武器系統性能參數。
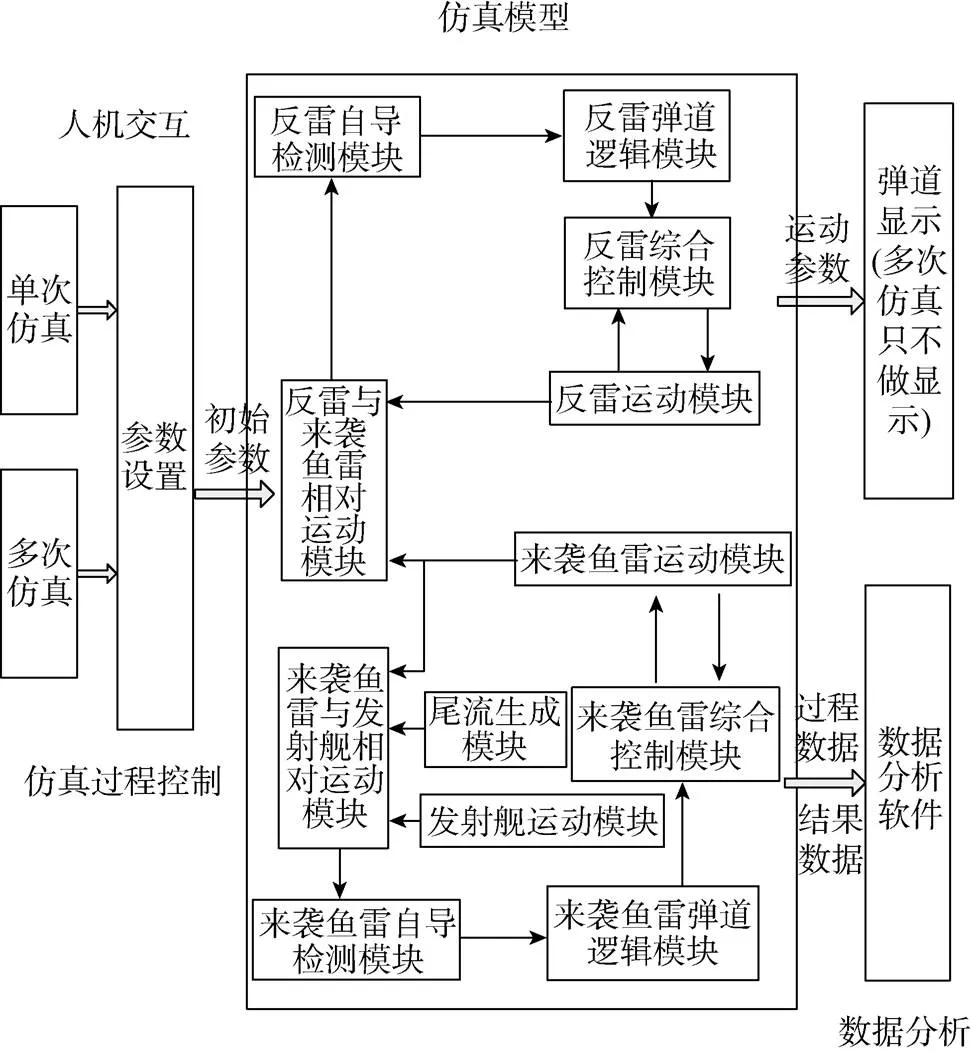
圖1 基本功能模塊調用關系圖
2) 界面2: 仿真選擇界面, 點擊單次仿真, 進入界面3, 點擊統計仿真, 進入界面4。
3) 界面3: 單次仿真界面, 首先進行仿真態勢設定, 點擊仿真態勢設定按鈕, 進入仿真態勢設定界面, 仿真態勢設定完成后點擊確定, 通過返回按鈕進入單次仿真界面, 進行單次仿真。
4) 界面4: 統計仿真界面, 首先進行仿真態勢設定, 點擊仿真態勢設定按鈕, 進入仿真態勢設定界面, 仿真態勢設定完成后點擊確定, 通過返回按鈕進入到統計仿真界面, 進行統計仿真。
5) 界面5: 仿真態勢設定界面如圖4所示, 包括本艦態勢、來襲魚雷態勢和反雷態勢。
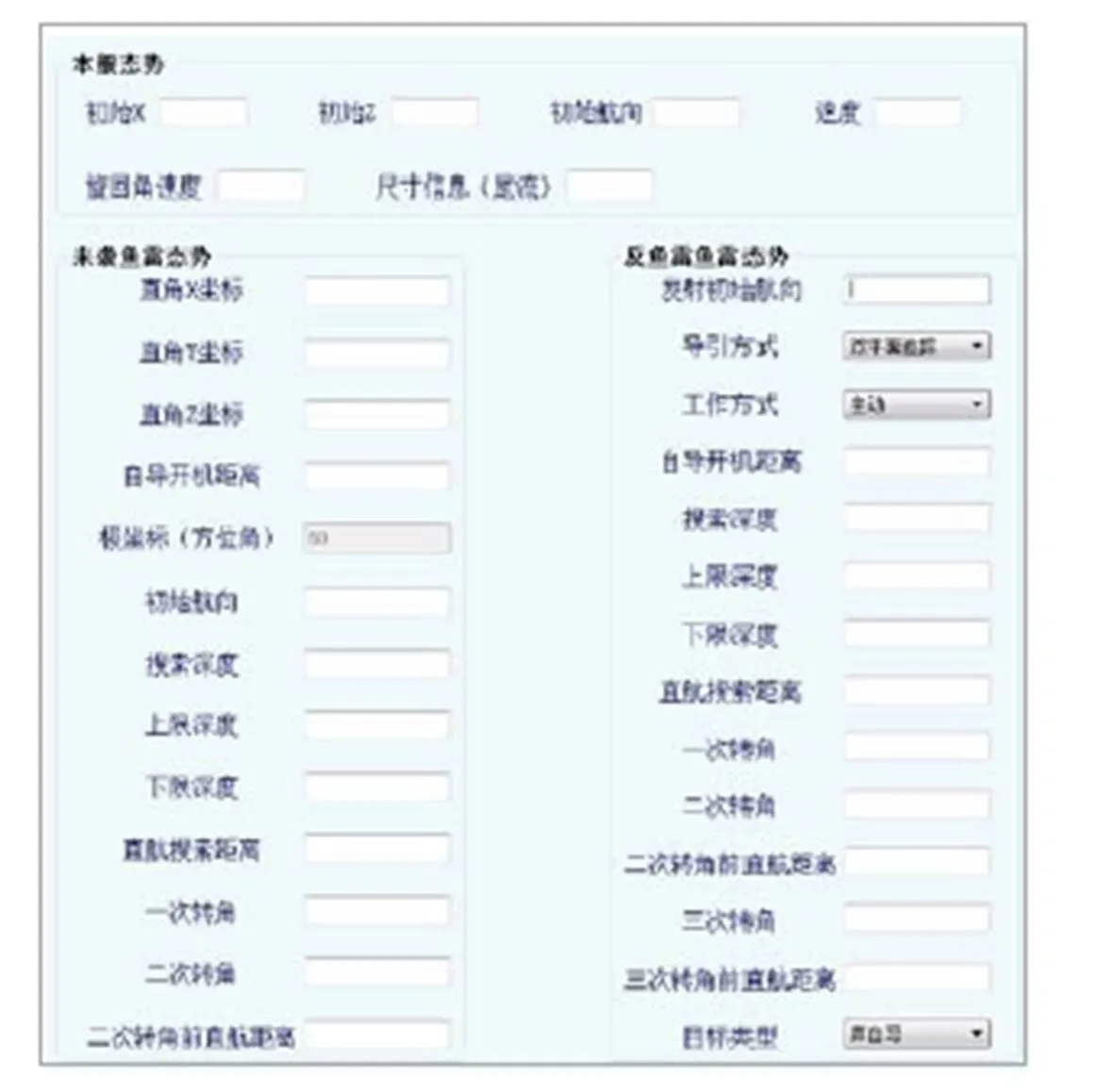
圖4 仿真實體態勢界面
2.2 仿真模型設計
仿真建模采用類庫封裝的建模方法, 形成數字魚雷仿真類庫, 類庫包含本艦、反魚雷魚雷、來襲魚雷、海洋環境以及仿真過程控制等各模型組件。各個模型考慮可重用性需求, 對輸入、輸出接口進行了標準化的設計, 能夠被其他仿真系統調用, 下面以反魚雷魚雷和過程控制模型為例, 進行對外交互接口的設計。
2.2.1 反魚雷魚雷模型
反魚雷魚雷模型[6]由5個模塊組成, 包括: 魚雷運動模塊、綜合控制模塊、相對運動模塊、彈道邏輯模塊和自導檢測模塊, 各功能模塊間的調用關系和輸入輸出接口如圖5所示。
2.2.2 仿真過程控制模型
模型建立完成后, 設定初始狀態, 進行仿真參數范圍設置, 如圖3和圖4所示, 進行多次迭代仿真試驗, 并對整個仿真過程進行控制(開始、暫停和停止)。運行過程中, 各個模塊按照步長進行推進, 模塊間按照協議進行通信; 單次仿真為魚雷追擊艦艇, 艦艇探測識別來襲魚雷并發射反魚雷魚雷進行射擊攔截, 在一次過靶后單次仿真結束; 單次仿真結束后, 自動調整參數設置, 進行下次仿真運行迭代; 根據搜索優化設定條件, 尋求滿足要求的局部最優結果, 輸出仿真過程參數如表1所示, 仿真結果數據如表2所示。
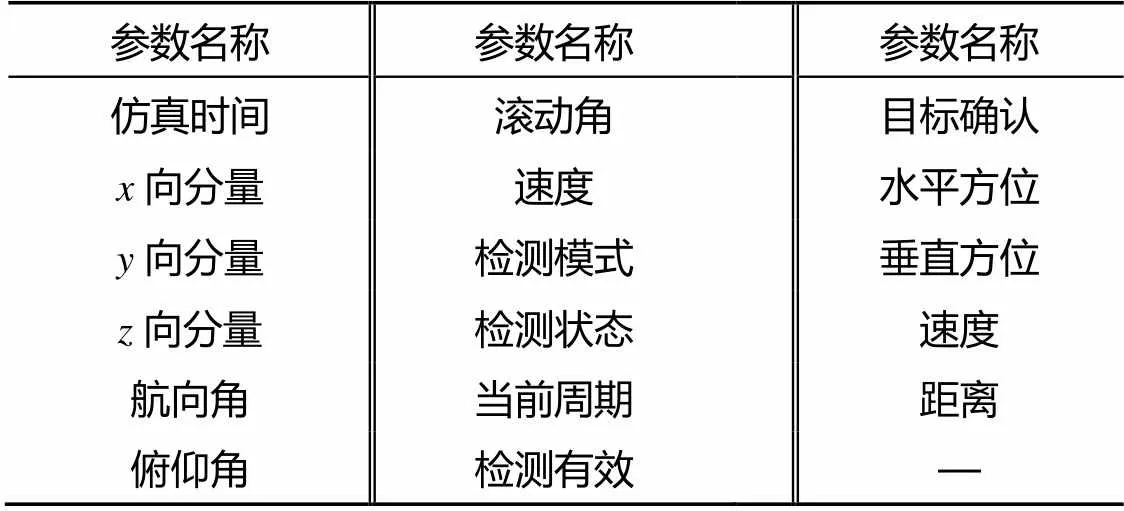
表1 仿真過程參數
表2 仿真結果參數
2.3 軟件流程設計
反魚雷魚雷全彈道數學仿真系統應用流程按照預想的作戰仿真過程設計, 具體描述如下。
1) 運行反魚雷魚雷全彈道數學仿真平臺, 對仿真方式進行選擇, 包括單次仿真和統計仿真。
2) 設置相應的仿真態勢(包括來襲魚雷的初始位置、本艦的初始位置)。
3) 依據目前的聲吶探測能力, 給出帶有一定誤差的魚雷報警舷角、距離、速度和航向信息, 按照迎面攔截射擊法[7-10]求解射擊諸元參數。
4) 裝訂射擊諸元參數, 包括一次轉角、一次轉角后航行時間、二次轉角等。
5) 仿真開始, 隨著仿真步長的推進, 每仿真步長執行以下步驟: a. 本艦運動; b. 來襲魚雷按照設定狀態運動, 完成初始彈道, 自導開機, 進行聲自導檢測, 執行相應自導導引彈道邏輯; c. 反魚雷魚雷發射后按照設計的全彈道流程開始運動。
6) 如果為單次仿真, 每顯示步長, 本艦、來襲魚雷和反魚雷魚雷更新數據到人機交互界面, 進行態勢顯示。
7) 統計仿真采用非實時解算方式, 每完成一次仿真, 其數據更新到人機交互界面進行顯示。
2.4 仿真同步和時鐘控制
1) 反魚雷魚雷全彈道數學仿真系統進行單次仿真時, 針對3個仿真實體建立3個線程同步運行, 每個線程的數學仿真步長為5 ms, 直到仿真停止, 過程數據顯示采用時鐘控制, 每20個仿真步長更新一次;
2) 反魚雷魚雷全彈道數學仿真系統進行統計仿真時, 采用非實時解算方式, 對單條次解算結果和統計結果進行輸出;
3) 反魚雷魚雷全彈道數學仿真系統支持仿真結果回放, 仿真過程數據存儲步長為5 ms, 進行回放時, 以數據存儲步長進行仿真推進。
3 仿真應用
3.1 反魚雷魚雷全彈道典型態勢仿真
在建立的全彈道數學仿真系統平臺上, 以某型魚雷攻擊某型水面艦艇為例, 對反魚雷魚雷攔截來襲魚雷的整個作戰過程進行仿真試驗, 通過單次仿真驗證反魚雷魚雷全彈道動作流程的設計合理性; 通過統計仿真評估不同反魚雷魚雷射擊陣位下, 反魚雷魚雷攔截來襲魚雷的作戰效能。
3.1.1 作戰想定
仿真系統采用大地坐標系, 以零時刻本艦位置為原點, 正北為軸,軸按右手法則確定, 建立直角坐標系。
仿真想定內容如下:
1) 仿真初始時刻(0 s), 艦艇位于(0,0)點, 初始航向為0o, 以一定速度直航運動; 來襲魚雷進入反魚雷魚雷探測系統探測范圍, 探測來襲魚雷坐標為(2 000, 2 000), 方位為–45o, 速度為50 kn; 反魚雷魚雷處于為發射待命狀態;
2) 反魚雷魚雷探測系統對目標的方位探測誤差為±3o, 距離探測誤差為5%(為初始探測距離), 數據滿足正態分布;
3) 反魚雷武器系統在魚雷報警后規定時間內完成射擊諸元的求解并發射反魚雷魚雷;
4) 反魚雷魚雷入水后, 進行目標搜索和檢測, 當來襲魚雷在反魚雷魚雷自導作用范圍內時, 捕獲來襲魚雷, 以高速向目標靠近;
5) 當雷目距離小于引信作用距離時, 反魚雷魚雷攔截成功。
3.1.2 仿真結果
根據試驗態勢想定, 在參數設定中對目標、來襲魚雷、反魚雷魚雷坐標位置進行設定。同時, 對魚雷其他需求參數進行配置。設定完成后加載試驗態勢, 進行單次仿真和統計仿真。仿真過程如圖6和圖7所示。
從圖6可以看出, 艦艇武器系統在報警后規定時間內發射反魚雷魚雷, 反魚雷魚雷按照武器系統求解的射擊諸元運動, 自導開機后, 反魚雷魚雷檢測到來襲魚雷時, 以高速靠近目標, 執行相應的導引彈道, 當反魚雷魚雷與來襲魚雷相對距離小于反魚雷魚雷毀傷半徑或來襲魚雷與艦艇相對距離小于來襲魚雷毀傷半徑時, 仿真停止。
從圖7可以看出, 在距離誤差5%, 方位誤差3o, 航向誤差2o, 速度誤差1.5 m/s, 且均滿足正態分布條件下, 統計仿真命中概率為74%, 仿真結果與前期的理論研究結果相符。
3.2 反魚雷魚雷全彈道性能指標優化仿真
在建立的全彈道數學仿真系統平臺上分析反魚雷魚雷不同性能參數的作戰效能。
3.2.1 仿真內容
在同一發射陣位下分別模擬來襲魚雷為直航雷和聲自導雷時, 反魚雷魚雷在不同自導作用距離下的作戰效能, 考慮聲吶探測的距離和方位誤差, 考核指標為反魚雷魚雷的攔截概率。
3.2.2 仿真結果
仿真結果見表3, 由表可見, 文中建立的全彈道數學仿真系統可以分析反魚雷魚雷在不同性能參數下的作戰效能, 由此可以應用該系統在考慮作戰使用的條件下對總體性能參數進行研究, 為反魚雷魚雷的論證和工程研制提供參考。
表3 全彈道仿真結果
4 結束語
文中通過對武器全彈道過程的描述, 利用C++ GUI QT創建了完整的彈道過程仿真平臺。該仿真平臺采用參數化建模, 將重要的參數與模型相剝離, 使得模型具有較好的復用性和靈活性。通過反魚雷魚雷數學仿真軟件對反魚雷魚雷的全彈道過程仿真得到仿真數據, 支持反魚雷魚雷作戰使用的深入研究, 可較好地用于研究驗證反魚雷魚雷全彈道動作流程的設計合理性, 優化性能參數設計, 為反魚雷魚雷的作戰效能研究提供參考。下一步將充分利用實航試驗數據、陸上臺架試驗數據以及仿真試驗數據, 完善反魚雷魚雷作戰使用環境及全系統數學模型, 形成實航試驗、陸上臺架試驗及仿真試驗數據庫、模型庫、方法庫, 進一步為其工程研制提供支撐。
[1] 陳春玉. 反魚雷技術[M]. 北京: 國防工業出版社, 2006.
[2] 李斌, 范若楠, 倪文璽, 等. 基于彈道仿真的魚雷性能優化方法[J]. 魚雷技術, 2015, 23(3): 172-176.Li Bin, Fan Ruo-nan, Ni Wen-xi. An Optimization Method of Torpedo Performance Based on Trajectory Simulation [J]. Torpedo Technology, 2015, 23(3): 172-176.
[3] 丁振東. 反魚雷魚雷關鍵技術探討[J]. 魚雷技術, 2007, 15(1): 6-11.Ding Zhen-dong. Discussion about Key Technologies of Anti-Torpedo Torpedo[J]. Torpedo Technology, 2007, 15(1): 6-11.
[4] Jasmin Blanchette. C++ GUI Qt4編程[M]. 北京: 電子工業出版社, 2014.
[5] Mark Summerfield. Qt高級編程[M]. 北京: 電子工業出版社, 2014.
[6] 蔣繼軍. 魚雷仿真技術[M]. 北京: 國防工業出版社, 2013.
[7] 李本昌, 李長文. 預定相遇態勢的潛射魚雷射擊及其技術方法[J]. 指揮控制與仿真, 2013, 35(2): 5-8.Li Ben-chang, Li Chang-wen. The Shooting of Submarine Torpedo and Its Technical Method in Predetermined Situation[J]. Command Control & Simulation, 2013, 35(2): 5-8.
[8] 由大德, 徐德民. 反魚雷魚雷攔截概率影響因素仿真分析[J]. 魚雷技術, 2010, 18(4): 312-315.You Da-de, Xu De-min. Analysis on Parameters Influening Intercept Probability of Anti-torpedo Torpedo[J]. Torpedo Technology, 2010, 18(4): 312-315.
[9] 李曉寧,明星, 朱若寒.反魚雷魚雷攔截彈道及攔截概率[J].魚雷技術, 2008, 16(3): 9-12.Li Xiao-ning, Ming Xing, Zhu Ruo-han. Intercept Trajectory and Intercept Probability of Anti-Torpedo Torpedo[J]. TorpedoTechnology, 2008, 16(3): 9-12.
[10] 夏睿, 張靜遠, 張江, 等. 反魚雷魚雷初始占位搜索研究[J]. 船電技術, 2013, 33(1): 22-24. Xia Rui, Zhang Jing-yuan, Zhang Jiang, et al. Research on the Anti-torpedo Torpedo Initial Search Sites[J]. Marine Electric & Electronic Engineering, 2013, 33(1): 22-24.
(責任編輯: 許 妍)
Design and Application of Whole Trajectory Simulation System for Anti-Torpedo Torpedo
CAO Meng, NI Wen-xi, JIANG Ji-jun
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi’an 710077, China)
Mathematical simulation plays important roles in weapon demonstration and development, such as optimizing parameter matching, assessing operational effectiveness, and predicting test results. Because the trajectory interception process of an anti-torpedo torpedo(ATT) is more complicated than that of traditional torpedo due to self-characteristic of the ATT, a whole trajectory simulation system for the ATT is designed in this paper. The function and composition of the simulation system, as well as the key models and modules, are expounded. Simulation application is carried out under typical combat conditions, and the validity of the models and simulation system is verified. This whole trajectory simulation system can be adopted to research ATT’s overall performance plan considering operational application, verify design rationality of whole trajectory process, guidance law and performance parameters, and facilitate demonstration and engineering development of an ATT.
anti-torpedo torpedo; whole trajectory; simulation system
曹萌, 倪文璽, 蔣繼軍. 反魚雷魚雷全彈道數學仿真系統設計與應用[J]. 水下無人系統學報, 2018, 26(3): 253-257.
TJ630.1; TP391.9
A
2096-3920(2018)03-0253-05
10.11993/j.issn.2096-3920.2018.03.011
2017-09-26;
2017-11-13.
曹 萌(1990-), 女, 碩士, 工程師, 研究方向為數學仿真.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
當代陜西(2020年13期)2020-08-24 08:22:02
數學物理學報(2020年2期)2020-06-02 11:29:24
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
光學精密工程(2016年6期)2016-11-07 09:07:19
新民周刊(2016年15期)2016-04-19 18:12:04
新民周刊(2016年15期)2016-04-19 15:47:52
新聞傳播(2015年11期)2015-07-18 11:15:04