基于OpenCV的AEB系統車輛檢測和預警研究
2018-07-02 03:54:14楊俊華YangJunhua
北京汽車 2018年3期
楊俊華Yang Junhua
(重慶車輛檢測研究院 國家客車質量監督檢驗中心,重慶 401122)
0 引 言
目前,國內外學者對前方車輛檢測研究較為深入,Charkari[1]利用陰影區域的特征檢測得出車輛底部類似矩陣陰影區域比路面亮度數值低,雖然此方法的檢測速度較快,但是容易受到路面因素的影響。Aarthi[2]采用貝葉斯分類器,通過結合角點算法有效解決了樣本干擾問題,在一定程度上提高了車輛識別檢測的效率,這一方法雖然識別效果好,但耗時較長。我國學者王海[3]等提出兩步法對車輛進行檢測,檢測率高但實時性較低。關于車輛檢測預警的研究主要從時間與距離進行判斷,孫曉艷[4]在考量目標車輛橫向距離后提出了車輛碰撞時間(Time to Collision,TTC)前撞預警算法,但這一算法容易受到相對速度的影響。在綜合國內外最新研究的基礎上,提出了基于Open CV的 AEB系統的車輛防撞算法,并利用Haar-like+Adaboost分類器與粒子濾波原理實現車輛跟蹤,然后基于車輛測距幾何模型對車輛防撞預警進行測試,測試結果表明即碰時間的TTC算法性能最佳,有效提升對前方車輛檢測預警的精確率。
1 前方車輛檢測
1.1 車輛檢測流程
1.1.1 分類器訓練過程
車輛的正、負樣本分別為512張和4 500張。利用 Open CV提供的基于 Haar-like特征的Adaboost訓練器,對樣本進行特征分類訓練[5]。
基于Open CV的分類器訓練主要有2個步驟:
1)準備正、負樣本文件。采用MIT-CBCL項目作為車輛樣本圖像庫。
2)利用Create Samples建立正樣本,統一將createsamples.cpp制作文件轉化為vec文件,然后設定統一的分辨率。訓練時間與樣本的數量有關,當樣本圖片滿足上限需求時,樣本訓練耗時較短,樣本訓練過程如圖1所示[6]。
1.1.2 車輛檢測過程
通過訓練得到的級聯分類器進行視頻圖像檢測,并判斷圖像中車的位置、大小。如下為車輛檢測的2種重要方式[7]。
(1)等比例縮小圖像;
(2)等比例放大分類器檢測窗口。
車輛預警防撞對實時性要求較高,因此,為了提高檢測性能,采用等比例放大分類器檢測窗口的方法。
1.2 基于粒子濾波的車輛跟蹤
若將車輛檢測視為動態隨機系統,則目標車輛位置、大小就是隨機系統狀態,對隨機系統狀態X的估計就是跟蹤目的[8]。測量值Y對應具體的圖像信息,通過巴氏距離對目標顏色進行比較,實現跟蹤。分別計算各個粒子與目標的巴氏距離系數,從而獲得各個粒子的權重[9]。
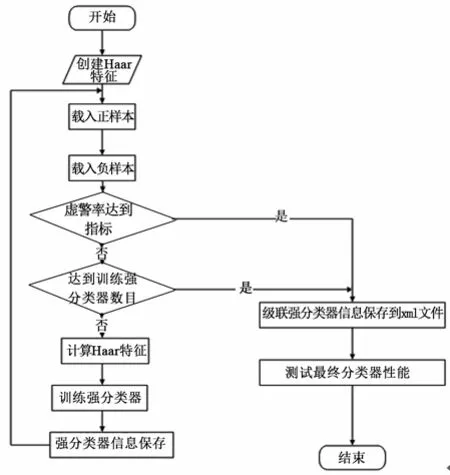
圖1 Haar特征訓練流程圖
2 車輛防撞預警算法
2.1 基于單目視覺的距離測量
計算機視覺在三維信息方面的應用通常有單目、雙目和多目3種方式。選擇具有顯著性優勢的單目視覺對車輛、車道進行檢測[10]。
2.1.1視覺的測距模型
(1)基于小孔成像原理的成像模型。
當物體在視網膜中的成像大小、距離比值保持不變時,遵循歐幾里得定律。

式中,S為成像物體大小,為物體到視網膜的距離;s為視網膜物體成像大小。基于小孔成像原理,通過成像物體實際大小推算出物體的實際距離D。
物體實際距離計算式為

式中,h為像的高度;f為焦距;H為成像物體的高度;D為待測量距離。
(2)基于單幀靜態圖像的測距模型。
以水平放置的攝像機為軸心,利用攝像機三維投影形成的二維圖像,依據小孔成像原理測算物體到攝像機的距離。

式中,f為攝像機的有效焦距;h為攝像機的安裝高度;y為路面上的物體在圖像中的坐標點;y0為圖像平面的原點坐標。
(3)基于序列圖像的測距模型。利用前后圖像透視原理測距。
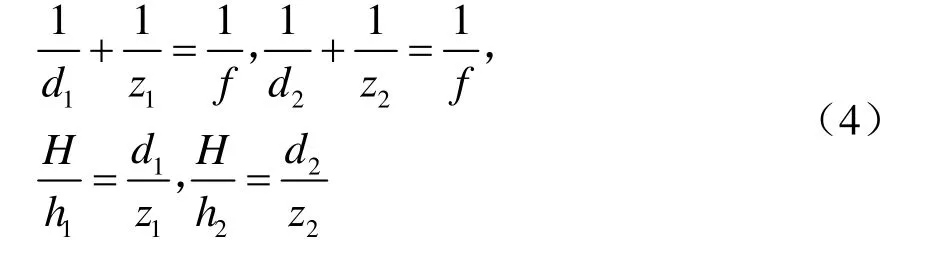
將4個方程聯立得到式(5)

由于H遠大于h2,則h2+H≈H,因此式(5)簡化整理得

式中,d1為實際測量距離;z1為物體實際像距;f為攝像機的有效焦距;d2為物體成像像距離;z2為物體成像像距;h1為像的實際高度;h2為像的高度;H為成像物體的高度。
2.1.2 前方車輛距離測量
針對車輛大小差異,基于小孔成像模型和序列圖像測距模型無法獲得車輛的實際尺寸,因此,采用基于車輛測距幾何模型對前方車輛距離進行測量。
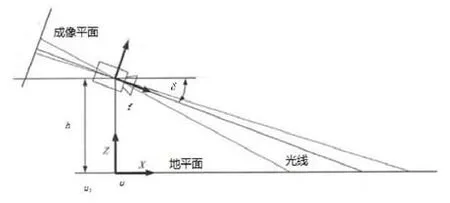
圖2 車輛測距幾何模型

式中,D為前方車輛距離;u為待測目標水平方向像素點坐標;u0為攝像機標定得到的水平方向主點坐標;h為攝像機的安裝高度;δ為攝像機的俯仰角度。
2.2 報警算法
2.2.1 安全距離的確定
基于OpenCV的AEB系統車輛檢測和預警主要通過檢測車輛前方障礙物,判斷車輛的安全距離并預警[11]。
從駕駛員發現障礙物到剎車停止分為 4個階段:第1階段從駕駛員發現障礙物到采取行動反應的時間;第2階段為駕駛員踩剎車制動的時間;第3階段為車輛制動持續的時間;第4階段為駕駛員放松制動踏板解除制動的時間。根據本次車輛檢測預警的特點,只需要考慮前3個階段。
計算整個制動過程中車輛的行駛距離,需要對每一階段的行駛距離進行計算。假設駕駛員發現前方障礙物時的初速度為v0,汽車制動產生的最大減速度為amax。
(1)駕駛員反應時間及制動器作用時間的確定。
駕駛員發現障礙物后迅速做出反應能極大提高行車安全性。在實際行駛過程中,除了駕駛員的身體素質、心理素質對行車安全性具有顯著的影響外,還有汽車行駛速度的影響,當汽車行駛速度過大時,增加了駕駛員獲取路面信息的難度與心理負擔。根據相關研究,汽車行駛速度為40 km/h時,駕駛員的反應時間為0.6 s,行駛速度為80 km/h時,反應時間為1.0 s。在此將駕駛員的反應時間t1取為 0.9s,消除間隙為0.3 s,制動力增長階段時間為0.5 s。
(2)汽車最大制動減速度的確定。
汽車制動減速度與車輛制動器的制動力、輪胎材料、路面條件等有關,為了簡化檢測難度,重點考慮汽車制動減速度對安全距離的影響。道路路面以及道路材料與汽車制動減速度密切相關,干燥水泥路面、潮濕水泥路面和積雪路面與制動減速度的關系見表1。
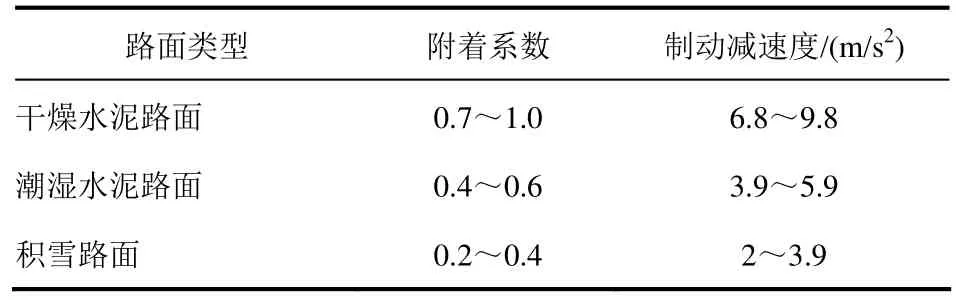
表1 路面條件與附著系數及制動減速度關系
為了提高可靠性和行車安全性,在計算安全距離時,取制動減速度值為7 m/s2。
(3)停車安全距離的確定。
為了提高車輛安全性,將5 m作為停車安全距離。當汽車安全停止后與障礙物保持的一定距離就是停車安全距離。通常停車安全距離設定為2~5 m,為提高車輛檢測報警的時效性,選擇5 m作為停車安全距離。基于OpenCV的AEB系統能識別障礙物,并通過判斷車輛前方的距離實現報警。
2.2.2 碰撞時間預測
計算得出車輛前方與車輛行駛的安全距離,汽車是否會有發生碰撞的危險取決于車輛距離與速度。
車輛避撞模型主要有Mazda模型、Honda模型、Berkeley模型、Seungwuk Moon 模型和TTC模型。
Mazda模型危險距離制動公式為

式中,v為己車速;vrel為相對車速;a1、a2分別為己車與前車最大減速度;t1、t2分別為駕駛員反應時間與制動器延遲時間;d0為最小停車距離;dbr為危險制動距離。
Honda模型危險距離制動公式為
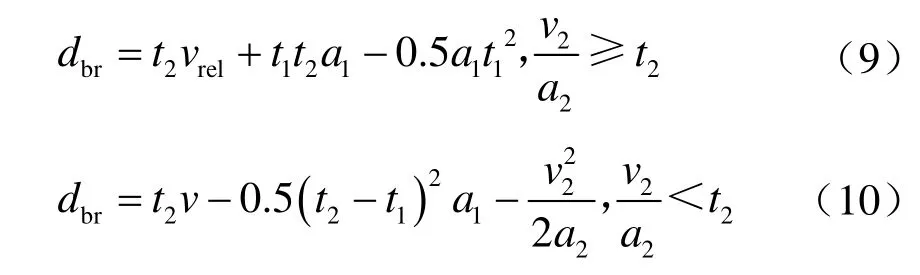
式中,v為己車速;v2為前車車速;a1、a2分別為己車與前車的最大減速度;t1、t2分別為系統延遲時間和制動時間。

Berkeley 模型碰撞預警公式為式中,t1、t2分別為駕駛員反應時間和制動系統延遲時間。
Seungwuk Moon模型碰撞預警公式為

式中,Tdelay、f(μ)、amax分別為系統延遲時間、制動因數和最大制動減速度。
TTC模型碰撞預警公式為

式中,dbr為制動距離;D為兩車相對距離;d0為安全停車距離。
針對碰撞時間預測,采用即碰時間TTC模型來估計駕駛員與前方車輛碰撞時間,幫助駕駛員及時做出反應,避免追尾事故發生。
3 基于AEB系統車輛防撞預警測試
3.1 AEB仿真測試場景構建
為了測試基于 OpenCV的車輛檢測和預警算法的性能, AEB系統仿真測試場景主要由顯示器、主機、羅技轉向盤、前風擋玻璃和座椅構成駕駛輔助系統(Advance Driving Assistance System,ADAS)仿真平臺,如圖3所示。

圖3 ADAS 仿真平臺
在一條825 m直線道路上建立車輛緊急制動(Autonomous Emergency Braking,AEB)仿真場景,使用PreScan獨立傳感器。傳感器1設定的最大探測距離為150 m,俯仰角為9°,水平角為10°;傳感器2設定的最大探測距離為30 m,俯仰角與傳感器1相同,水平角為80°。
測試工況選擇歐洲新車評價規程中前車靜止、前車急剎2種不同的工況。
CCRs(Car to Car Rear stationary,前車靜止工況):以10 km/h的梯度逐漸遞增為80 km/h。前車為Euro-NCAP車輛目標模型,并保持靜止。
CCRb(Car to Car Rear braking,前車減速工況):以50 km/h車速,Euro-NCAP車輛目標模型相距本車為12 m和40m,并以6 m/s2和2 m/s2的減速度急減速。
2種工況仿真測試場景如圖4所示。
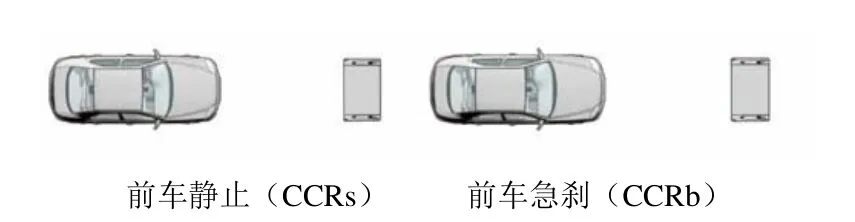
圖4 AEB仿真測試場景
3.2 仿真測試結果
利用PreScan、Simulink 軟件得出測試結果,汽車行駛車速為10~80 km/h時,Honda、Mazda、Seungwuk Moon模型都能實現車輛避撞。在車速為70 km/h時,TTC模型與Berkeley模型不能避免碰撞,因此,需要調整模型的時間閥值。
將TTC模型中預警時間、部分制動時間、全力制動時間閥值設為2.9 s、1.9 s、0.9 s后能成功避免碰撞。調整后各模型仿真算法如圖5所示。
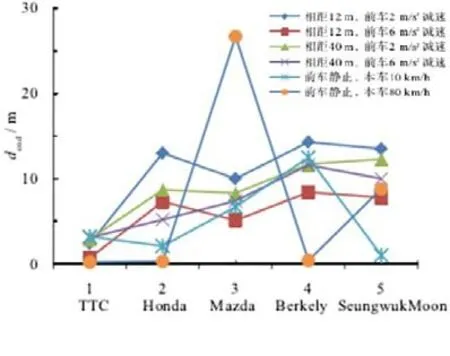
圖5 各算法仿真結果
由圖 5可知,在不同工況下,自動制動結束時,TTC避撞算法的相對車距最為集中,并且所需輸入參數少,只需要相對車速vrel與相對車距D,而且避撞公式簡單,方便調整即碰時間閥值,可以適應不同車型的避撞算法開發。
4 結 論
基于OpenCV的AEB系統車輛檢測和預警算法,利用Haar-like+Adaboost實現前方車輛的識別與檢測,根據粒子濾波原理建立車輛跟蹤模型。然后基于單目視覺模型對前方車輛距離進行測量,根據障礙物與車輛的安全距離預測碰撞時間,有效提升前方車輛檢測預警的精確率。基于AEB系統的測試仿真結果表明,在不干擾駕駛員正常駕駛的前提下,即碰時間的TTC算法的縱向避撞性能最優。
[1]Charkari N M,Mori H. New Approach for Real Time Moving Vehicle Detection [C]//Proceedings of 1993 International Conference on Intelligent Robots and Systems, 1993:273-278.
[2]Aarthi R,Padmavathi S,Amudha J. Vehicle Detection in Static Images Using Color and Corner Map[C]//Proceedings of International Conference on Recent Trends in Information,Telecommunication and Computing. IEEE Computer Society,2010:244-246.
[3]Wang Hai,Zhang Weigong,Cai Yingfeng. Design of a Road Detection System Based on Monocular Vision[J]. 東南大學學報(英文版),2011,27(2):169-173.
[4]孫曉艷. 基于單目視覺的夜晚汽車前撞預警系統研究:[D].西安:西安工業大學,2013.
[5]謝文華. 基于OpenCV的視頻監控系統設計與實現[D]. 廈門:廈門大學,2016.
[6]薛璐晨. 基于 OpenCV的行人異常檢測系統的設計與實現[D].長春:吉林大學,2016.
[7]劉從軍,楊輝,史杰,等. 基于OpenCV的運動目標監控系統設計[J]. 信息技術,2014(5):82-85.
[8]王傳欽,曹江濤,姬曉飛. 基于視頻分析技術的車距測量及預警系統設計[J]. 計算機技術與發展,2016,26(9):87-90.
[9]Oliver J. /var/log/sysblog[J].
[10]張楚金. 智能車的前方車輛檢測和預警算法研究[D]. 長沙:湖南大學,2015.
[11]趙炯. 基于 VC++的車前障礙物識別預警系統設計[D]. 西安:長安大學,2015.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12