脈沖激光引信探測平面目標的回波特性研究
2018-07-02 09:47:30陳杉杉張合徐孝彬
兵工學報 2018年6期
關鍵詞:信號
陳杉杉, 張合, 徐孝彬
(1.南京理工大學 智能彈藥技術國防重點學科實驗室, 江蘇 南京 210094;2.河海大學 機電工程學院, 江蘇 常州 213022)
0 引言
脈沖激光具有方向性好、瞬時功率大和抗干擾能力強等優點[1-2],廣泛應用于各種常規彈藥和導彈。脈沖激光引信通過飛行時間測量法獲取目標的距離信息,而彈體在高速運動過程中存在的角運動[3]會導致脈沖激光引信探測光束的入射角動態變化范圍變大,影響了回波脈沖寬度和幅值,降低了測距精度。因此,需要建立準確的回波模型,以期為提高探測精度提供理論依據。
針對脈沖激光回波模型問題,Johnson[4]通過仿真方法分析了平面目標特征對測距精度的影響,獲得了距離精度下限,但其建立的回波模型未考慮雙向反射分布函數(BRDF)的影響。Mou等[5]基于高斯回波模型建立了非對稱回轉目標的激光測距回波模型,獲得了不同參數下的回波特性,但未考慮光強分布影響。Steinvall[6]、Steinvall等[7]和Gr?nwall等[8]分析了幾種典型目標對激光回波功率信號影響,開創性地提出了將反射過程作為線性系統,但模型無法體現目標尺寸對回波能量影響。孫俊靈等[9]通過將激光發射、信道傳播、目標反射等環節作為卷積傳遞進行激光回波建模,但是模型都將發射信號視作高斯信號,且忽略了光強分布影響。Jie等[10]和Hao等[11]假設發射信號為高斯波形,建立了平面目標回波模型。馬鵬閣等[12]結合激光雷達方程與目標回波脈沖展寬建立了地面目標回波信號模型,回波模型充分考慮了展寬特性。高精度脈沖激光測距對于發射脈沖在功率、脈寬和脈沖前沿有著較高要求,參看半導體激光驅動電路設計,輸出波形都為非對稱高斯信號[13-15]。由于高動態性要求,脈沖激光引信發射光學系統要求盡量簡單,大多采用單級非球面透鏡設計[16-18],因此激光光強為非對稱高斯分布,常用的高斯發射脈沖波形及高斯光強分布模型與實際的應用情況存在著一定差距。
本文基于激光雷達回波方程,假設發射波形與光強分布分別為重尾函數波形與橢圓高斯分布,充分考慮BRDF和目標表面尺寸影響,推導了平面目標的回波方程解析解,仿真分析了不同參數對回波信號、信噪比與探測概率的影響,通過試驗驗證了理論仿真的有效性。
1 脈沖激光引信工作原理
本文中的脈沖激光引信主要由脈沖激光發射系統(脈沖觸發電路、驅動電路、SPLLL90-3脈沖半導體激光器、準直透鏡)、脈沖激光接收系統(時刻鑒別電路、信號處理電路、AD500-9雪崩光電二極管、聚焦透鏡)以及時間間隔測量電路、主控電路和發火電路組成[19]。其工作原理框圖如圖1所示。
具體工作原理如下:脈沖觸發電路輸出兩路相同的脈沖觸發信號,一路驅動激光驅動電路工作,另一路作為測距起始脈沖輸入到時間間隔測量電路;驅動電路驅動激光器發出脈沖激光束,光束經過準直透鏡后開始探測,當光束遇到平面目標后產生散射光信號;光信號被接收透鏡接收,聚焦到帶濾光片的AD500-9雪崩光電二極管光敏面上,轉換為電流信號;電流信號由信號處理電路放大為脈沖回波信號;時刻鑒別電路處理回波信號、產生結束脈沖,輸入到時間間隔測量電路;主控電路根據測得的起止時刻解算目標距離,在設定的最佳起爆距離內輸出發火信號,實現對目標的最佳毀傷。
2 平面目標回波功率方程推導
在脈沖激光引信中,由于收發間隙較小,且發射孔徑和接收孔徑遠小于引信與目標之間的距離,因此探測激光束和激光回波光束可認為在同一點發出和接收。平面目標的探測模型如圖2所示。脈沖激光引信在點O處,脈沖激光束沿z軸進行探測,其中心與平面目標相交于點N,y軸鉛直向上,x軸按右手坐標系確立。圖2中,l1為平面目標的長度,l2為平面目標的寬度,ψ為目標平面與Oxy平面的夾角(入射角),ω為脈沖激光束位于坐標原點一定距離處的光斑半徑。
2.1 回波功率基本方程
對于激光探測系統,脈沖激光回波功率方程[20]為
(1)
式中:Pr(t)為脈沖激光回波功率;Pt(t)為脈沖激光發射功率;t為激光脈沖發射后的任意時刻;Gt為發射天線增益;Rt為激光發射系統與目標之間的距離;σ為激光散射截面積;Rr為激光接收系統與目標之間的距離;D為激光接收系統直徑;ηa為大氣透過率;ηs為激光探測系統光學透過率。
激光散射單位元的散射截面方程[20]為
dσ=4πfr(ψ)cos2ψdA,
(2)
式中:fr(ψ)為BRDF函數;dA為激光散射單位面元。
激光發射系統的光束發散角較小,目標縱深線度與探測距離相比可忽略,則橫向光強分布是關于x和y的函數,與z軸分量無關,即dAcosψ=dxdy,結合(2)式對(1)式進行積分:
(3)
式中:E(x,y,Rr)為橢圓高斯光束照度;Pt(t-2Rr/c-2z/c)為脈沖激光發射功率,c為光速;x、y和z為圖2坐標系中3個坐標軸分量。
為簡化計算,令t′=t-2Rr/c-2z/c. 根據文獻[21],(3)式可改寫為
(4)
式中:T1/2為激光發射脈沖的半峰寬度。
半導體激光器光束空間服從橢圓高斯分布,則橢圓高斯光束照度[9]為
E(x,y,z)=
(5)

采用重尾函數來描述激光發射脈沖的時域波形。相對于常用的高斯函數,重尾函數能夠準確地描述激光發射脈沖上升沿陡峭和下降沿平緩的特征:
(6)
式中:P0為激光發射峰值功率。
為簡化計算,令τ=T1/2/1.22. 將z=xtanψ、(4)式和(5)式代入(2)式,有

(7)
2.2 非擴展目標回波功率方程
激光光束照射到平面上,當平面尺寸小于光斑尺寸時平面目標為非擴展目標,(7)式化簡為

(8)
(9)
式中關于x變量的積分為
(10)
當ψ=0°時,(10)式變為
(11)
則(9)式可化簡為
(12)

(13)
(14)
最終(8)式可化簡為
(15)
2.3 擴展目標回波功率方程
激光光束照射到平面上,當平面尺寸遠大于光斑尺寸時平面目標為擴展目標。
當ψ=0°時(7)式可化簡為
(16)
當ψ≠0°時(7)式化簡為
(17)
fr(ψ)可根據雙向反射分布函數[21-22]獲得:
(18)
式中:等式右邊第1部分和第2部分分別代表粗糙表面的相干分量和朗伯分量;cosα=cosψ/cosγ,
(19)
(20)
φ為天頂角;α為微觀小平面法線方向與平面法線之間的夾角;γ為微觀平面上本地坐標系的入射角;kh、kr、kg、h、g和fg為待定參數。
回波信噪比[23-24]為
(21)
式中:Ri為雪崩光電二極管的電流響應度;e為電子電荷;Pb為背景光功率;id為暗電流;Ma為倍增因子;Fm為雪崩光電二極管的噪聲系數;Bw為噪聲頻譜帶寬;k為波爾茲曼常數;T為絕對溫度;R1為雪崩光電二極管探測器的負載電阻。
3 回波信號數值仿真
為分析不同條件下脈沖激光引信的回波功率與信噪比,下面進行數值仿真,仿真參數中假設目標為擴展目標,設置仿真如表1所示。其中BRDF參數選自文獻[22]。
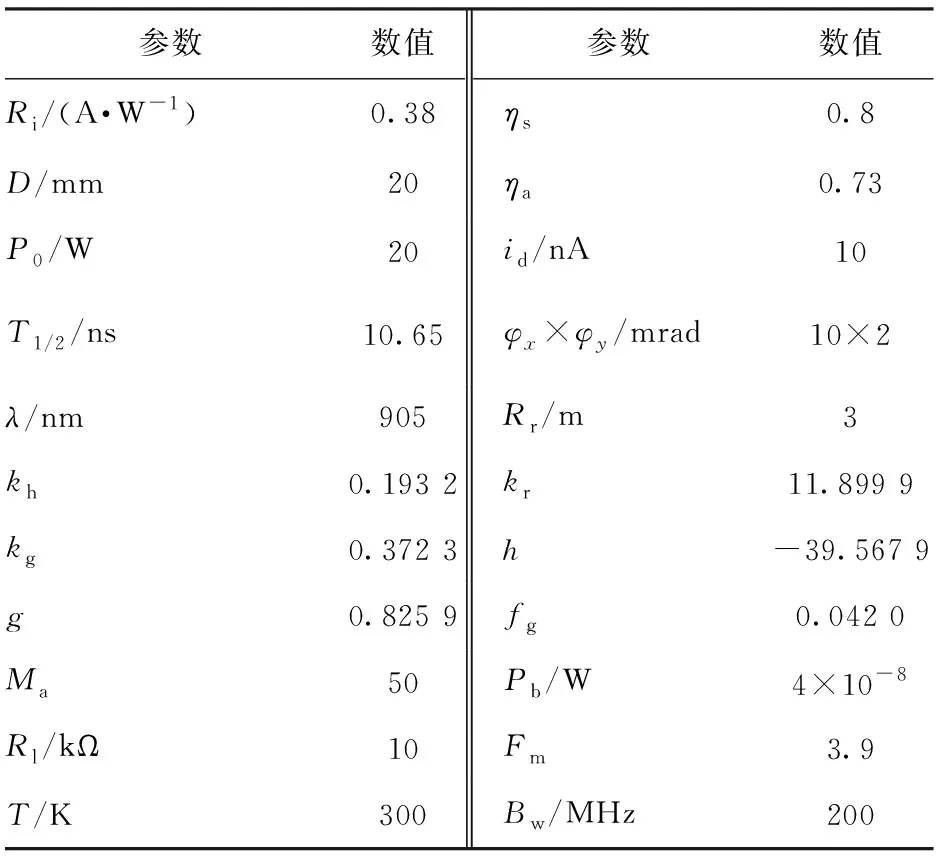
表1 系統仿真參數表
3.1 發射特性分析
激光發射特性如圖3和圖4所示。從圖3可知,激光發射波形上升沿陡而下降沿緩,與半導體激光器驅動電路發射波形匹配,可以很好地描述激光發射特性,其峰值功率為20 W. 從圖4可知,歸一化光強仿真的分布為橢圓高斯光束分布。
3.2 回波特性分析
3.2.1 不同入射角下的回波特性
設非擴展目標的參數:l1=ωy(R),l2=ωx(R)。不同入射角下的回波信號如圖5(a)和圖5(b)所示。
由圖5(a)可知,對于非擴展目標:當入射角度為0°時回波峰值功率為90 μW;當入射角度為10°時回波峰值功率為41 μW,不足入射角0°時回波峰值功率的1/2;當入射角度為40°時回波峰值功率為30 μW,僅為入射角0°時回波峰值功率的1/3;當入射角度為60°時回波峰值功率為18 μW,僅為入射角0°時回波峰值功率的1/5.
由圖5(b)可知,對于非擴展目標:當入射角度為0°時,回波峰值功率為180 μW;當入射角度為10°時,回波峰值功率為90 μW,僅為入射角0°時回波峰值功率的1/2;當入射角度為40°時,回波峰值功率為60 μW,僅為入射角0°時回波峰值功率的1/3;當入射角度為60°時,回波峰值功率為30 μW,僅為入射角0°時回波峰值功率的1/6.
由(8)式可知,不同材料的BRDF值對回波的影響主要體現在幅值上,不會對回波的形狀產生影響,受激光入射角影響較大。以非擴展平面為目標,不同入射角下的峰值功率如圖6所示。由圖6可知:當入射角在0°~10°內時,隨著角度增加,峰值功率衰減明顯,體現出(18)式中粗糙表面的相干分量;當入射角在10°~60°內時,峰值功率衰減緩慢,體現出粗糙表面的朗伯分量。
由圖5和圖6可知,無論是擴展平面目標還是非擴展平面目標,隨著入射角度增加,峰值功率減小。且入射角度在0°~10°時回波峰值功率變化情況遠比10°~60°時變化情況劇烈。脈沖激光引信由于彈體高速角運動影響,工作過程中入射角度變化較大,采用常用的恒閾值時刻鑒別方法處理回波信號存在著較大測距誤差,極端情況下誤差甚至超過10 ns,嚴重影響了脈沖激光引信的正常工作。
3.2.2 不同目標尺寸下的回波特性
以非擴展平面為目標,當入射角為10°時,不同平面尺寸下的回波信號如圖7所示。從圖7可知,隨著尺寸減小,激光照射到目標的面積減小,回波功率積分上下限和峰值功率減小,且峰值時刻保持一致。
3.3 信噪比仿真
不同入射角下的回波信噪比SNR如圖8所示。從圖8中可知,隨著入射角增加,信噪比減小,在0°~5°時下降較快,在5°~60°時下降緩慢。由于脈沖激光引信在實際工作中是一個高速動態的探測過程,入射角變化范圍較大,在設計系統時應以入射角較大時進行設計,保證在最低回波能量下滿足探測概率要求。
4 試驗與分析
為驗證理論公式推導的正確性,對坦克用涂漆軍綠色平面進行回波試驗。設置試驗參數如表1所示。涂漆軍綠色靶板實物圖如圖9所示。入射角為10°時的歸一化激光回波功率如圖10所示,從圖10中可知,仿真波形與實際的回波波形基本一致,都體現出重尾函數特性且脈寬相近。
不同入射角下的回波特性如圖11所示,從圖11可知:隨著入射角增加,回波峰值電壓減小,回波峰值位置時刻有抖動,其與理論仿真結果變化趨勢一致,再一次驗證了理論分析的正確性;當入射角為0°~10°時,峰值時刻的回波電壓下降速率較快,形狀近似于重尾函數,體現粗糙表面的相干分量;當入射角為20°~70°時,隨著角度增加,峰值時刻的回波電壓下降較為緩慢,體現粗糙表面的朗伯分量。
綜上所述,當前脈沖激光引信采用恒閾值時刻鑒別法,從仿真和試驗結果可以得知,該方法易造成測距誤差,不利于脈沖激光引信取得最佳的毀傷效果。采用恒比定時法或高通容阻法進行時刻鑒別,可以有效避免回波信號幅度變化帶來的檢測誤差,提高探測精度。后續需要開展基于這兩種時刻鑒別方法的理論及試驗研究,并結合實際的應用環境選擇最佳時刻鑒別方法,以降低高速動態探測過程中入射角度對測距精度的影響。
5 結論
本文建立了平面目標的脈沖激光引信回波模型,并根據該模型,在激光雷達方程基礎上,采用解析方法推導了平面目標的回波信號功率方程,仿真分析了不同條件下的脈沖激光平面目標回波特性,對典型平面目標進行了回波特性試驗。試驗結果表明,理論波形與實驗波形一致,隨著入射角度增加,回波信號的峰值電壓減少,峰值時刻前移,與仿真結果保持一致,為后續提升脈沖激光引信在高速動態條件下的高精度探測提供了理論參考依據。
參考文獻(References)
[1] 徐孝彬, 張合, 張祥金, 等. 激光周向探測小型化發射技術[J]. 光子學報, 2016, 45(3): 0314005.
XU Xiao-bin, ZHANG He, ZHANG Xiang-jin, et al. Miniaturized transmitting technology of laser circumferential detection[J]. Acta Photonica Sinica, 2016, 45(3): 0314005. (in Chinese)
[2] 譚佐軍, 陳海清, 康競然. 激光引信接收光學組件的研究與測試[J]. 光子學報, 2009, 38(11): 2742-2746.
TAN Zuo-jun, CHEN Hai-qing, KANG Jing-ran. Research and test of receiver module in laser fuze [J]. Acta Photonica Sinica, 2009, 38(11): 2742-2746. (in Chinese)
[3] 韓子鵬. 彈箭外彈道學[M]. 北京:北京理工大學出版社,2008:219-246.
HAN Zi-peng. Exterior ballistics of projectiles and rockets[M]. Beijing: Beijing Institute of Technology Press, 2008: 219-246. (in Chinese)
[4] Johnson S E. Effect of target surface orientation on the range precision of laser detection and ranging systems[J]. Journal of Applied Remote Sensing, 2009, 3: 033564.
[5] Mou Y, Wu Z S, Li Z J, et al. Geometric detection based on one-dimensional laser range profiles of dynamic conical target[J]. Applied Optics, 2014, 53(35):8335-8341.
[6] Steinvall O. Effects of target shape and reflection on laser radar cross sections[J]. Applied Optics, 2000, 39(24): 4381-4391.
[7] Steinvall O, Chevalier T, Larsson H. Data collection and simulation of high range resolution laser radar for surface mine detection[C]∥Proceedings of Radar Technology and Applications Ⅺ. Bellingham, WA, US: SPIE, 2006: 85-102.
[8] Gr?nwall C A, Steinvall O K, Chevalier T R. Influence of laser radar sensor parameterson range-measurement and shape-fitting uncertainties[J]. Optical Engineering, 2007, 46(10):106201-1-106201-11.
[9] 孫俊靈, 馬鵬閣, 孫光民,等. 基于目標波形模型的多脈沖激光雷達目標信號模擬[J]. 紅外與激光工程, 2016, 45(7):278-284.
SUN Jun-ling, MA Peng-ge, SUN Guang-min, et al. Multi-pulse laser radar target signal simulation based on target echo waveform model[J]. Infrared and Laser Engineering, 2016, 45(7): 278-284. (in Chinese)
[10] Jie C, Cheng Y, Hao Q, et al. Improving the performance of time-domain pulsed echo laser profile using tunable lens[J]. Optics Express, 2017, 25(7):7970-7983.
[11] Hao Q, Cao J, Hu Y, et al. Differential optical-path approach to improve signal-to-noise ratio of pulsed-laser range finding.[J]. Optics Express, 2014, 22(1):563-575.
[12] 馬鵬閣, 金秋春, 柳毅,等. 新型機載多脈沖激光雷達目標信號模擬器[J]. 紅外與激光工程, 2012, 41(8):2068-2072.
MA Peng-ge, JIN Qiu-chun, LIU Yi, et al. New airborne multi-pulse LADAR target signal simulator[J]. Infrared and Laser Engineering, 2012, 41(8): 2068-2072. (in Chinese)
[13] 甘霖, 張合, 張祥金. 激光引信高速窄脈沖互補驅動電源設計[J]. 光子學報, 2014, 43(10): 1014002.
GAN Lin, ZHANG He, ZHANG Xiang-jin. Design of narrow pulse-width high speed and complementary drive module for laser fuze[J]. Acta Photonica Sinica, 2014, 43(10): 1014002. (in Chinese)
[14] 陳彥超, 馮永革, 張獻兵. 用于半導體激光器的大電流納秒級窄脈沖驅動電路[J]. 光學精密工程, 2014, 22(11): 3145-3151.
CHEN Yan-chao, FENG Yong-ge, ZHANG Xian-bing. Large current nanosecond pulse generating circuit for driving semiconductor laser[J]. Optics and Precision Engineering,2014, 22(11): 3145-3151. (in Chinese)
[15] 陳偉, 苗琪媚, 孫峰,等. 脈沖激光器大電流窄脈沖驅動設計[J]. 強激光與粒子束, 2010, 22(6): 1223-1227.
CHEN Wei, MIAO Qi-mei, SUN Feng, et al.Design of high current narrow width pulsed power supply of laser diode[J]. High Power Laser and Particle Beams, 2010, 22(6): 1223-1227. (in Chinese)
[16] 甘霖, 張合, 張祥金. 激光引信新型光學大視場接收技術研究[J]. 光子學報, 2013, 42(12):1514-1518.
GAN Lin, ZHANG He, ZHANG Xiang-jin. New optical large field receiving technology in laser fuze[J]. Acta Photonica Sinica, 2013, 42(12): 1514-1518. (in Chinese)
[17] 姜海嬌. 高重頻脈沖激光雷達測距統計特性及其像質評價[D]. 南京:南京理工大學, 2013.
JIANG Hai-jiao. Statistical properties of high repetition rate pulse laser radar range and its image quality evaluation[D]. Nanjing: Nanjing University of Science and Technology, 2013.(in Chinese)
[18] 徐孝彬, 張合. 脈沖激光探測方位角磁電檢測技術[J]. 光子學報, 2017, 46(1): 146-154.
XU Xiao-bin, ZHANG He. Pulsed laser detection azimuth magneto-electric detection technology[J]. Acta Photonica Sinica, 2017, 46(1): 146-154. (in Chinese)
[19] 徐孝彬, 張合. 激光周向探測系統最佳脈沖頻率與掃描轉速[J]. 中國激光, 2016,43(5):195-201.
XU Xiao-bin, ZHANG He. Optimal pulsed frequency and scanning speed of laser circumferential detection system[J]. Chinese Journal of Lasers, 2016, 43(5): 195-201. (in Chinese)
[20] Jelalian A V. Laser radar systems[M]. Boston,MA,US: Artech House, 1992.
[21] 李艷輝, 吳振森, 宮彥軍,等. 目標激光脈沖一維距離成像研究[J]. 物理學報, 2010, 59(10):6988-6993.
LI Yan-hui, WU Zhen-sen, GONG Yan-jun, et al. Laser one-dimensional range profile[J]. Acta Physica Sinica, 2010, 59(10): 6988-6993. (in Chinese)
[22] 曹運華, 吳振森, 張涵璐, 等. 基于粗糙樣片光譜BRDF的空間目標可見光散射研究 [J]. 光子學報, 2008, 37(11): 2264-2268.
CAO Yun-hua, WU Zhen-sen, ZHANG Han-lu, et al. Research on visible light scattering of spatial targets based on spectral BRDF of target samples [J]. Acta Photonica Sinica, 2008, 37(11): 2264-2268. (in Chinese)
[23] 楊玉峰, 吳振森, 曹運華. 一種實用型粗糙面六參數雙向反射分布函數模型 [J]. 光學學報, 2012, 32(2): 306-311.
YANG Yu-feng, WU Zhen-sen, CAO Yun-hua. Practical six-parameter bidirectional reflectance distribution function model for rough surface [J]. Acta Optica Sinica, 2012, 32(2): 306-311. (in Chinese)
[24] 黃波, 邱琪. 空間激光雷達最小接收光功率的計算 [J]. 電子科技大學學報, 2004, 33(1):35-38.
HUANG Bo, QIU Qi. A calculation of minimal detectable power of laser radar in space [J]. Journal of University Electronic Science and Technology of China, 2004, 33(1): 35-38. (in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06