SRM狀態轉換表和應用中新狀態獲取方法
2018-07-03 02:41:30王吉華任傳波曲金玉
微特電機 2018年6期
關鍵詞:檢測
王吉華,任傳波,曲金玉,李 超
(山東理工大學, 淄博 255000)
0 引 言
隨著開關磁阻電機(以下簡稱SRM)在航空航天、礦山、紡織、家電和交通等領域的廣泛應用,人們對其調速系統的研究越來越重視。SRM的運行控制要遵循 “磁阻最小”原理,即在轉子合適位置給對應的定子相繞組通電和斷電進行換相控制,確保合適的開通角和關斷角,達到正常運行和進一步調節轉速、轉矩等目的[1,2],可見,轉子位置檢測是驅動控制的關鍵環節之一。
轉子位置檢測有直接和間接法。前者是利用光電和磁敏等位置傳感器進行檢測,后者是無位置傳感器檢測,利用測得的相電壓[3]和相電流[4-6]等估算磁鏈和電感等電磁量,也有直接測得附加線圈電感[7,8]和附加電容值[9]等,再分別由磁鏈、電流、電壓、電感和電容等與轉子位置的關系來獲取轉子位置參數。由于傳感器檢測的成本、體積和可靠性等因素,無傳感器的間接檢測方法一直是近年來研究熱點,并取得了很多重要成果,但目前還沒有達到普及應用[10,11]。
目前在市場上應用多的仍然是傳感器直接檢測[12-16],特別是在大中型SRM調速系統中,而且傳感器直接檢測可作為航空航天等重要領域SRM位置檢測的冗余備份[10]。對于SRM調速系統,只要能檢測到轉子的關鍵位置信息即可進行換相控制,傳感器直接位置檢測和部分無傳感器位置檢測[17,18]均基于這種思想。換相控制需檢測出這些關鍵位置,并且當轉子從一個關鍵位置到另一個關鍵位置轉換時傳感器輸出值必須作出相應變化,此值稱作轉子的一個位置狀態,一個電角度周期內若干個狀態就組成狀態轉換表。它是換相控制的重要依據,但文獻中很少有對其進行具體的分析,特別是在設計實踐中的新狀態值獲取方法。
因此,以目前應用中占大多數的光電位置傳感器為例,針對轉子相對位置和傳感器輸出值分析狀態轉換表及其規律;分析在電機運行時直接讀取傳感器來獲取新狀態值所遇到的問題,基于狀態轉換表規律,提出了依據上一次狀態值和捕捉當前輸出值發生變化的傳感器編號而通過查表獲取的方法,并設計轉子正反轉查詢的表格。狀態轉換表分析和實踐中獲取新狀態值的思路和方法對于其它結構形式的SRM調速系統均適用,可提供參考和借鑒。
1 位置分布關系
分析狀態轉換表可從轉子、定子和位置傳感器的相對位置關系著手。針對某三相12/8 SRM,對其進行拆卸和位置關系測量,如圖1所示,確定其光電位置傳感器(實質為光耦,后簡稱光耦)、定子和轉子的分布及位置關系,如圖2所示。在圖2中,3個光耦按圓周方向固定安裝在電機后端蓋上,其和定子均用粗實線表示,二者剛性連接;擋板和擋板間隙交叉分布在擋板圓盤的外圓周上,擋板圓盤和轉子均剛性連接在轉子軸上,擋板圓盤和轉子用細實線表示;定子、轉子、光耦安裝圓周面和擋板圓盤四者同軸。光耦槽正對于擋板所在的擋板盤外圓周,當擋板盤隨著轉子一起轉動時,擋板和擋板間隙將輪流通過3個光耦槽。

圖1 SRM拆卸圖
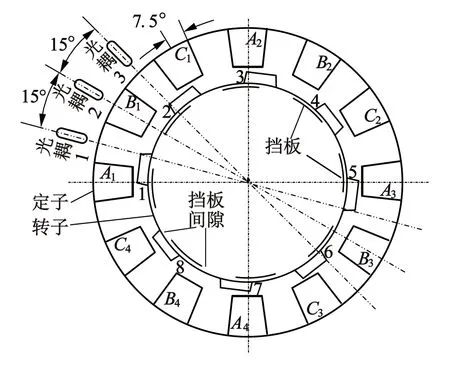
圖2 SRM位置關系圖
圖2中,將轉子和定子圓周平分為48個扇形,用虛線標識,每個虛線夾角即機械角為7.5°,由于對稱性和為了簡化,只標出相對的2個90°區域。定子上A,B和C三相各有4個凸極1~4,轉子有凸極1~8。定子是凸極和凹槽均為15°的均勻交叉分布,3個光耦是兩兩中心線之間為15°的均勻分布,見圖2中的雙點劃線,并且中間光耦的中心線和定子凸極B1中心線重合。轉子是凸極15°和凹槽30°的交叉分布,擋板盤的外圓周上是擋板和擋板間隙均為22.5°的均勻交叉分布,并且擋板順時針轉動的前邊沿和各個轉子凸極中心線重合。電機運行時,剛性連接的定子和光耦靜止,而剛性連接的轉子和擋板盤同軸轉動。
當一款SRM定型生產時,其定子、轉子、光耦位置傳感器和擋板圓盤四者的裝配關系將確定,這決定了在轉子轉動一周的各個位置上這四者的相對位置雖各不相同但均確定,圖2為某一位置上這四者的相對位置關系。由于轉子和擋板盤剛性同軸連接,擋板和轉子凸極的相對位置固定;定子和光耦位置傳感器剛性連接,定子凸極和傳感器的相對位置固定。當轉子轉動時,擋板和擋板間隙輪流通過光耦槽,光耦將產生的變化輸出,不同的輸出就代表了轉子凸極和定子凸極離散的關鍵相對位置信息,即狀態,狀態變化的時刻就是關鍵位置檢測點。
2 關鍵位置檢測點
根據SRM的電感線性模型[1-2]和圖2的電機結構特點,分析轉子關鍵位置檢測點。電機為12/8三相結構,每相四極串聯,由SRM設計理論可知,轉子極距τr=45°,步進角θstep=15°,在圖2的電機結構中,由于3個光耦兩兩夾角15°,擋板和擋板間隙為22.5°均勻分布,使得轉子每轉動7.5°就有一個光耦的值發生變化,可檢測半個步距的相對位置關系,控制可更加精細。
由于轉子轉動一個轉子極距就完成了一個電角度周期,由圖2可看出,3個光耦相鄰極A1,B1和C1的各自相鄰轉子極8-1,1-2和2-3均分別完成一個電角度周期,而A,B,C三相的各自4個極1~4與各自的相鄰轉子極位置關系完全相同,所以只需選擇某相一個極與轉子一個極來分析關鍵位置檢測。以B1和轉子極1為例,并假設B1為通電相,隨轉子轉動的電感變化和對應角度如圖3所示。
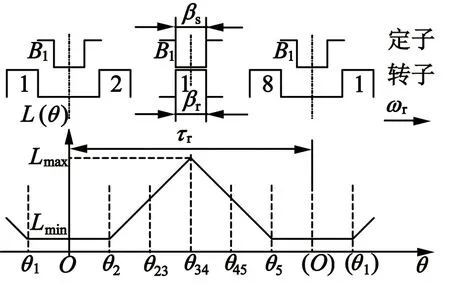
圖3 關鍵位置檢測點分布圖
圖3中, 對應圖2的順時針旋轉方向,每2條虛線之間夾角對應機械角為7.5°和電角度60°,從O到(O)的轉子極距τr對應機械角為45°和電角度360°,轉子每順時針轉動7.5°就對應一個關鍵位置檢測點,如圖3中各條虛線對應的θ軸上點和角度。由圖2結構圖,在θ軸上,從O向順時針轉動方向的θ5各檢測點,依次對應轉子凸極1和2的凹槽中心與A1和B1的凹槽中心對齊、轉子凸極1前邊沿與B1后邊沿對齊、轉子凸極1前邊沿與B1中心對齊、轉子凸極1前邊沿與B1前邊沿對齊(即兩者的中心對齊)、轉子凸極1中心與B1前邊沿對齊、轉子凸極1后邊沿與B1前邊沿對齊等6個關鍵位置檢測點。
O對應圖2位置狀態下轉子極1的相對位置角0。B1繞組電感為最小值Lmin,O和θ2之間通常為開通角區域;θ2到θ34之間為電感上升區域;由于定子極弧βs和轉子極弧βr相等,且均為15°,最大電感Lmax退化為一個點,對應角度范圍為0;θ23和θ34之間通常為關斷角區域;θ34到θ5之間是電感下降區域。
這樣就可根據各區域控制的需要,由該區域的前后檢測點為基準進行相應的轉速和角度計算,從而達到換相控制所需的準確時刻。當到達一個檢測點時,將有1個光耦輸出值發生變化,3個光耦組合值也就發生變化,即狀態值變化,實際應用中轉子相對位置就是通過變化的狀態值來得到。
3 狀態轉換分析和狀態轉換表規律
在轉子和擋板盤轉動時,分析轉子相對位置的變化,并通過擋板盤和3個光耦組成的檢測電路所輸出的值表示這些位置狀態轉換關系,從而得到狀態轉換表,并分析其規律。
3個光耦的檢測電路相同,以1號光耦為例,如圖4所示。當擋板擋住時,光敏三極管不接收光而斷開,P1輸出低電平,邏輯值為0;當間隙通過光耦時,光敏三極管接收光而導通,P1輸出高電平,邏輯值為1。光耦1、2和3的輸出結果依次從低位到高位排列,形成一個三位二進制數作為狀態值,此狀態值就表示了擋板圓盤的位置即轉子的相對位置。
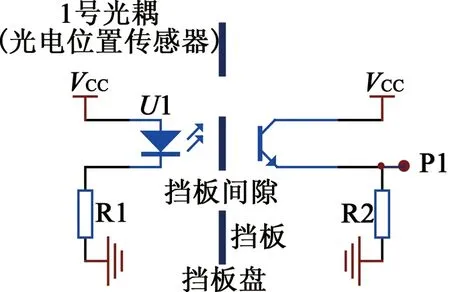
圖4 光耦檢測電路
為了便于分析,將圖2中定子和轉子圓柱體沿同一棱剖開,將圓周方向位置分布展成直線方向位置分布,如圖5和圖6所示,分別表示轉子順、逆時針方向轉動,并假設單相通電使轉子轉動。分析時,不妨將圖2中的位置作為進入各自狀態1的臨界位置,轉子順時針轉動一個角度即進入順時針狀態1,如圖5;轉子逆時針轉動一個小角度即進入逆時針狀態1,如圖6。每兩條虛線間隔為機械角7.5°,轉子和擋板圓盤每轉動7.5°狀態值將發生一次變換。由圖3可知,一個電周期由6個狀態組成,每一相定子極的相對位置均按此作周期性變化。
對于順時針轉動的狀態1,如圖5,光耦3被擋板擋住而輸出0,光耦1和光耦2通過間隙而輸出1,對應狀態值為二進制數011B(十進制數3),應使C相通電而到達下一個狀態。同理,狀態2~6的狀態值分別為010B(2),110B(6),100B(4),101B(5)和001B(1),并應分別使B,B,A,A和C相通電而到達各自的下一個狀態。
同樣,對于轉子逆時針轉動的狀態1,如圖6,光耦2和光耦3被擋板擋住而輸出0,光耦1通過間隙而輸出1,對應狀態值為001B(1),應使A相通電而到達下一個狀態。同理,狀態2~6的狀態值分別為101B(5),100B(4),110B(6),010B(2)和011B(3),并應分別使B,B,C,C和A相通電而到達各自的下一個狀態。
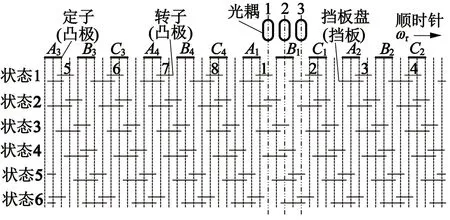
圖5 轉子順時針轉動時位置狀態分析圖
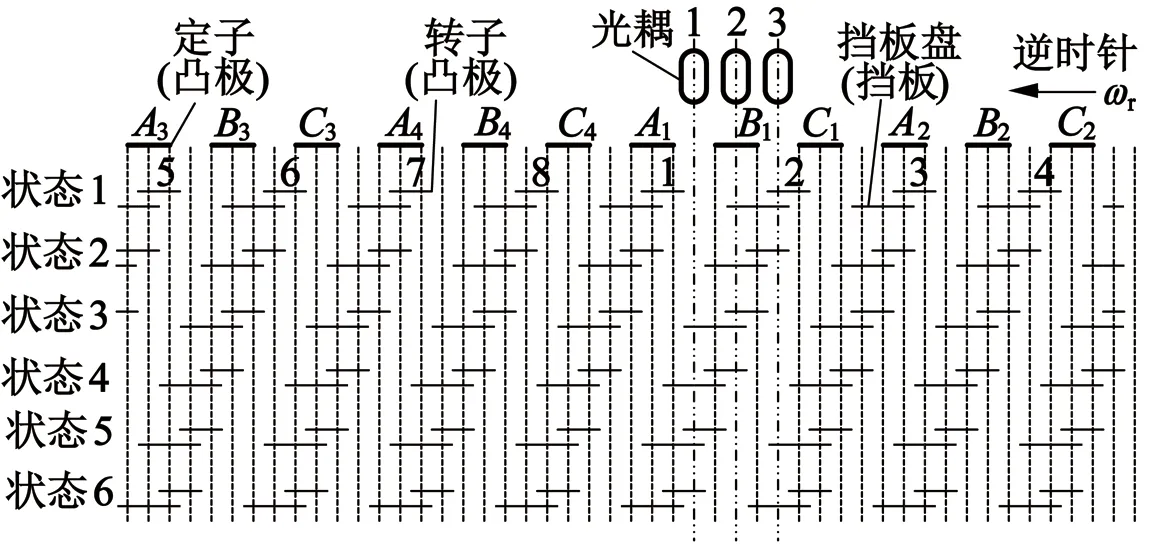
圖6 轉子逆時針轉動時位置狀態分析圖
總結以上分析,便可得到轉子順、逆時針轉動的位置狀態轉換表,如表1所示,其均以圖2中的臨界位置為起始點。對于狀態轉換表,狀態1~6僅是為了便于分析而進行的人為定義,對實際控制系統并無作用,實際起作用的是單片機讀取光耦檢測的狀態值,是換相控制的依據。各狀態值下的單相通電僅是為了分析需要而采用的一種換相控制方式,實際中不同的控制目的和策略可對應不同的方式。
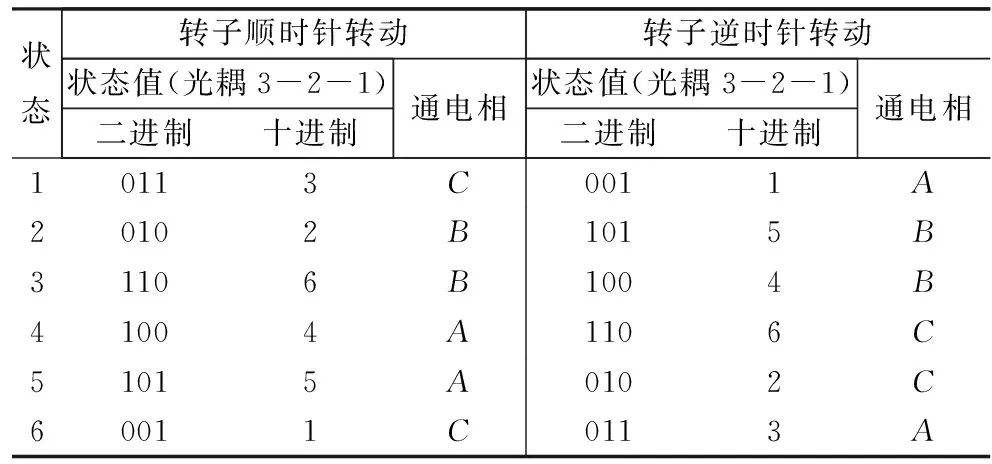
表1 三相12/8 SRM的狀態轉換表
從表1可以得到如下規律:
(1)總體看,在一個轉子極距內,轉子順、逆時針轉動的狀態值轉換順序和通電相剛好相反。順時針狀態是3-2-6-4-5-1-3周期循環,通電是C-B-A-C相循環;相反,逆時針分別是1-5-4-6-2-3-1和A-B-C-A循環。
(2)在一個轉子極距內,針對同一狀態值,也即轉子的同一位置區域,順、逆時針方向轉動的下一個狀態值不同。
(3)在一個轉子極距內,針對同一狀態值,順、逆時針方向轉動的通電相不同。
(4)從二進制數可看出,順、逆時針方向轉動的相鄰狀態值變換均由其中一個相應的傳感器值變化引起。
(5)從二進制數可看出,順、逆時針方向轉動上,引起相鄰狀態值變化的光耦是相鄰的,其沿著各自轉動方向,而且是3個光耦作周期性循環變化。
(6)從二進制數可看出,引起相鄰狀態值變化的相鄰光耦的輸出值是邏輯值0和1交錯循環的,即沿旋轉方向某擋板前邊沿或某擋板后邊沿正對光耦中心線,擋板進入或退出光耦檢測區。
(7)從圖2~圖6可知,某光耦值發生變化的時刻,即狀態值發生變化的時刻,正是關鍵位置檢測點,即轉子進入下一位置狀態的起始點。
規律(1)和(2)僅從總體上反映了順、逆時針方向上變化趨勢的差異,(3)是二者“磁阻最小”原理的本質上區別,(4)~(7)是轉子相對位置關系在外在表現上的不同。總之,狀態轉換表不能將順、逆時針方向狀態值和通電相按相反順序排列來簡單地表示,而完整的狀態轉換表應包含十進制數狀態值、通電相和反映光耦值變化規律的二進制數狀態值,而且要有三者之間的一一對應關系。
4 獲取當前狀態值的方法
對于一款SRM,其結構和狀態轉換表確定,是單片機調速控制的重要依據,關鍵是單片機要獲得電機運行的當前時刻狀態值和關鍵檢測點的準確時刻,才能根據狀態表準確地進行換相控制。從圖5和圖6的分析可看出,表1中狀態值是通過單片機讀取3個光耦值而得到,但此方法在各種轉速下并不是都可以得到準確的換相時刻。
單片機匯編語言或C語言的主程序均采用順序結構,含有跳轉和中斷響應。讀取光耦語句將放在主程序大循環中或某個中斷響應中;前者需等到下一循環到來時才能讀取,后者需等到此中斷事件發生時才能讀取;兩者均需等待一定時間,前者時間不確定,后者時間可能確定,如定時中斷,但電機轉速卻不確定。這將帶來2個問題:一是狀態漏檢,特別是高速運行時;二是讀取狀態不一定是在剛進入此狀態的時刻,即關鍵位置檢測點。
解決方法是利用單片機捕捉功能,由表1規律(4)、 (5)和 (7),實時捕捉狀態變化的準確時刻。又由規律(6),光耦輸出變化可能是上升沿或下降沿,則捕捉模塊要設置為上升沿和下降沿均捕捉,由此不會發生狀態漏檢,克服了以上2個問題。
但會帶來另一問題,捕捉并不像讀取那樣能得到當前狀態值。若采用捕捉并讀取的方法,也只能在捕捉中斷響應中讀取,但從捕捉事件發生到進入捕捉中斷響應來讀取需要一個時間片,這將影響換相控制的滯后,特別在高速時可能會造成控制失敗。
單片機查表能有效提高實時性,為此,通過捕捉和查表的方式來獲取當前狀態值。由狀態表規律(4)~(6),對于轉子順、逆時針方向轉動,狀態值和光耦變化規律存在一一對應關系,將上一個狀態值作為行,當前發生跳變的光耦編號作為列,設計的二維表格如表2所示,“*”表示不會被查表而可設置為單片機寄存器任何值。某種意義上,表2是用于捕捉的狀態轉換表,和表1一一對應。此表格也包含了表1的正反轉,查詢時不必考慮正反轉。
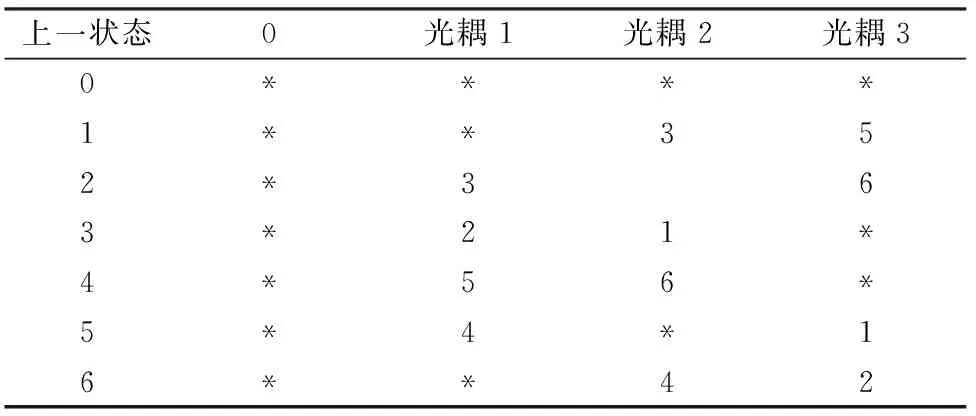
表2 單片機新狀態查詢二維表
由于捕捉必須發生在轉子轉動時,在靜止起動時刻仍然采用讀取3個光耦值獲取狀態,此時不存在實時性問題,硬件上與3個捕捉端口線并聯3個普通I/O口線來實現。靜止起動時讀取狀態值也是必需的,為查表提供初始的上一次狀態值。以上分析的狀態轉換表和狀態值獲取方法,已經在某12/8 SRM調速系統上進行了應用,經起動及各種轉速下的實驗,均能可靠運行。
5 結 語
從SRM的工程應用角度,測得位置傳感器、定子和轉子的位置關系,分析關鍵位置檢測點、狀態轉換表及其規律;分析電機運行時采用讀取光耦方法獲得新狀態值可能帶來的問題,利用狀態轉換表規律,提出利用捕捉和查表獲取的方法,并設計包含了正反轉的二維查詢表格。狀態轉換表分析方法和新狀態值獲取方法已在調速系統中得到驗證,可為SRM的工程應用提供參考。
[1] 王宏華.開關磁阻電動機調速控制技術[M].北京:機械工業出版社,2014.
[2] 吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010.
[3] 李廣海,葉勇,蔣靜坪.開關磁阻電機無位置傳感器技術的分析[J].微特電機,2004,32(7):5-7,44.
[4] 張旭隆,譚國俊,蒯松巖,等.在線建模的開關磁阻電機四象限運行無位置傳感器控制[J].電工技術學報,2012,27(7):26-33.
[5] 蔡駿,鄧智泉.基于相電感綜合矢量法的開關磁阻電機初始位置估計[J].中國電機工程學報,2013,33(12):145-151,197.
[6] 羅德榮,李亞雄,蔡亞輝,等.基于電感極值的開關磁阻電機無位置傳感技術[J].電力電子技術,2016,50(4):63-66.
[7] 毛良明,經亞枝,樊小明,等. 反串線圈法間接位置檢測技術在開關磁阻發電機系統中的應用研究[J].中國電機工程學報,2000,20(10):27-30.
[8] 李根,徐建單,程昭竣,等.基于外加線圈的開關磁阻電機無位置傳感技術[J].微特電機,2016,44(6):51-54.
[9] 詹瓊華,王雙紅,肖楚成.開關磁阻電動機電容式位置檢測技術[J].電工技術學報,1999,14(3):2-6.
[10] 鄧智泉,蔡駿.開關磁阻電機無位置傳感器技術的研究現狀和發展趨勢[J].南京航空航天大學學報,2012,44(5):611-620.
[11] 王騁,鄧智泉,蔡駿,等.電機轉子位置傳感器的評述與發展趨勢[J].微特電機,2014,42(3):64-71.
[12] 張超,全力,朱孝勇,等.基于DSP+CPLD的車用開關磁阻電機驅動控制系統的設計[J].電機與控制應用,2013,40(1):13-16,21.
[13] 姬起群,施火泉.基于C8051F500的開關磁阻電動機控制系統設計[J].微特電機,2013,41(2):60-62.
[14] 魏宏財.基于DSP的礦用運輸機車調速系統設計[J].煤炭技術,2017,36(9):204-206.
[15] 蔡燕,尹磊,姜文濤.開關磁阻電機調速系統半實物仿真平臺設計[J].微特電機,2017,45(7):41-44.
[16] CHEN H,GU J J.Implementation of three-phase switched reluctance machine system for motors and generator[J].IEEE ASME Transactions on Mechatronics,2010,15(3):421-432.
[17] 邱亦慧,詹瓊華,馬志源,等.基于簡化磁鏈法的開關磁阻電機間接位置檢測[J].中國電機工程學報,2001(10):60-63,121.
[18] 陳坤華,孫玉坤,吳建兵,等.基于電感模型的開關磁阻電機無位置傳感技術[J].電工技術學報,2006,21(11):71-75.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48