永磁同步電動機的速度指定位置跟蹤控制
2018-07-03 03:17:40王寶軍王家軍
微特電機 2018年6期
關鍵詞:設計
王寶軍,王家軍
(浙江交通職業技術學院, 杭州 311112)
0 引 言
隨著電機控制技術的發展,永磁同步電動機(以下簡稱PMSM)在當前的精確位置驅動領域起到了非常重要的作用。與直流電動機和感應電動機相比,PMSM具有結構緊湊、功率密度高、轉矩慣量比大、轉矩電流比高,以及控制性能更加突出等優點[1,2]。根據PMSM的不同應用場合,PMSM的應用主要用于位置控制、速度控制和轉矩控制3個方面。PMSM位置控制的性能受到摩擦、參數變化、未知負載轉矩和未建模動態等各種不確定因素的影響[3,4]。為了提高PMSM位置控制的性能,當前許多先進的控制技術被應用到PMSM位置控制的設計,例如滑模控制[5,6]、反推控制[7]、神經網絡[8]和模糊控制[9]等。
一般情況下,PMSM的位置控制包括3個控制環,即位置環、速度環和電流環。根據當前的控制方法,PMSM的速度控制由位置環的輸出進行控制,即PMSM的速度無法由外部進行調節。如果在PMSM位置控制過程中能夠增加一個速度控制的自由度,這將有利于提升PMSM位置控制的精度和設計靈活性。因此,如何在PMSM位置控制的過程中增加一個速度控制的自由度是本文所要解決的關鍵問題。
跟蹤控制問題是當前現代控制理論研究的一個重要方面。跟蹤控制問題可以分為2大類:軌跡跟蹤和路徑跟蹤[10]。軌跡跟蹤就是使得系統的某個狀態能夠跟蹤一個與時間相關的參考給定信號。與軌跡跟蹤相對應,路徑跟蹤是使系統的某個狀態跟蹤一個不受時間、速度和加速度等約束的參考給定信號。軌跡跟蹤問題可以看作是一個特殊的路徑跟蹤問題。當前在所有的PMSM位置跟蹤問題中,給定參考信號包含了時間、速度和加速度等控制信息。因此,這類位置跟蹤都可以歸結為軌跡跟蹤問題。如果在PMSM位置跟蹤過程中能夠指定電機速度的大小,這種控制方式對于PMSM的位置跟蹤控制是非常有意義的。借助于參考文獻[10]中的控制設計思路,PMSM的速度指定位置跟蹤控制可以分為兩步設計,第一是使位置跟蹤一個設定的路徑,第二是使位置的跟蹤滿足指定的速度指標。
反推控制是非線性反饋控制中的一種反向遞推設計方法[11]。反推控制的最大優點是借助虛擬狀態變量,采用一步一步的Lyapunov函數設計,使高階非線性系統的控制設計變得非常簡單。同時,反推控制的這種反向遞推設計方法對于不確定參數的自適應估計也是非常有利的。反推控制已經廣泛應用于PMSM的控制中。文獻[12]將反推控制應用于PMSM的速度跟蹤控制中。文獻[13]基于輸入-輸出精確線性化,利用反推控制實現了PMSM對于未知參數和負載轉矩干擾的魯棒控制。
在PMSM位置跟蹤控制的過程中,由于電機的轉速相對來說比較低,這使得位置跟蹤的性能受未知負載轉矩的影響較大。如果在PMSM 位置跟蹤的過程中能夠提高未知負載轉矩的估計速度,這將有利于進一步提高PMSM位置跟蹤的精度。干擾觀測器是解決運動控制系統中未知參數和負載干擾問題的有效手段[14]。當前干擾觀測器的設計絕大部分都是在頻域范圍之內進行設計,系統的穩定性很難證明。本文給出了一種新穎的干擾觀測器設計方法,這種干擾觀測器可以獨立于PMSM位置控制器,可以有效降低未知負載干擾對于位置控制精度的影響。
1 PMSM的模型
在轉子d-q坐標系內,典型的表貼式PMSM的數學模型可以表示如下:
(1)

(2)

(3)

(4)
式中:θ為轉子角度;ω為轉子角速度;R為定子電阻;L為定子電感;id和iq為定子d和q軸電流;ud和uq為定子d軸和q軸電壓;p為極對數;φf為轉子永磁磁通;J為轉子的轉動慣量;B為粘滯摩擦系數;TL為負載轉矩。
在磁場定向控制(或者矢量控制)中,直軸電流id常常設定為零,因此式(1)~式(4)中的PMSM模型可以簡化如下:
(5)

(6)

(7)
式中:a1=B/J,a2=kT/J,a3=pφf/L,a4=R/L,b=1/L,d=TL/J,kT=3pφf/2。
2 PMSM速度指定位置跟蹤控制的設計
PMSM的位置信號θ和位置給定信號θd為時間的函數,它們分別為θ(t)和θd(t)的縮寫。一般的位置跟蹤控制可以稱為基于時間指定的位置跟蹤控制,即在某一指定時刻位置信號θ到達給定的位置θd。基于時間指定的位置跟蹤可以表示:
(8)
式中:η(t)為位置跟蹤誤差。式(8)的物理意義代表PMSM的轉子位置能夠漸進跟蹤給定位置信號。
與時間指定位置跟蹤相對應,PMSM的速度指定位置跟蹤是指在某個指定的位置,PMSM能夠保持某個指定的速度。在一般位置跟蹤控制設計中,給定位置設定為θd(t)的模式,即給定位置是時間的函數。如果給定位置設定為時間的間接函數,即給定位置設定為θd[γ(t)],則通過這種方式可以在位置跟蹤過程中增加一個速度指定控制自由度。速度指定可以采用下面的方程式實現[10]:
(9)
式中:η(t)為速度指定控制誤差;vd[θd(t),t]為PMSM相應位置的指定速度控制變量。由式(9)可知:
(10)
為了有利于PMSM速度指定位置跟蹤控制的設計,利用自適應反推控制設計方法可以較方便地將速度指定控制引入控制器設計。針對式(5)~式(7),自適應反推控制設計可以分為三步。
第一步:選擇PMSM的位置跟蹤誤差作為第一個虛擬狀態變量:
x1=θ-θd(γ)
(11)
第一步的Lyapunov函數可以設計如下:
(12)
式(11)中虛擬狀態變量x1的導數:
(13)

第二個虛擬狀態變量x2選擇:
(14)
式中:k1>0為正常數。利用式(13)和式(14)可得:
(15)
利用式(15),則Lyapunov函數V1的導數:
(16)
第二步的Lyapunov函數V2設計如下:
(17)
Lyapunov函數V2的導數可以表示:
(18)
式(14)中虛擬狀態變量x2的導數可以表示:
第三個狀態變量x3選擇:

利用式(19)和式(20),Lyapunov函數V2的導數可以改寫:
第三步的Lyapunov函數V3設計如下:
(22)
Lyapunov函數V3的導數可以表示:
由式(20)可知,虛擬狀態變量x3的導數:
(24)
針對式(23),如果設計控制器uq和相應的自適應控制環節如下:

(26)

(27)
則可以保證:
(28)
由前面的控制設計過程可以得出,該自適應反推控制設計可以實現如下3個方面的功能:
(1) 位置的跟蹤:θ→θd;
由前面的推導設計過程可以得出,自適應反推控制需要設計2個自適應律,這增加了系統設計復雜性,同時未知負載的估算受虛擬狀態變量的影響。如果能夠對于未知負載轉矩的估計進行獨立設計,這將有利于簡化系統控制的設計,同時也可以提高未知負載轉矩估算的精確性。
3 干擾觀測器的設計
PMSM干擾觀測器的系統設計如圖1所示,主要包括控制器、干擾觀測器和PMSM。根據文獻[15],對于式(5)~式(7)中的PMSM模型,干擾觀測器可以設計為如下形式:
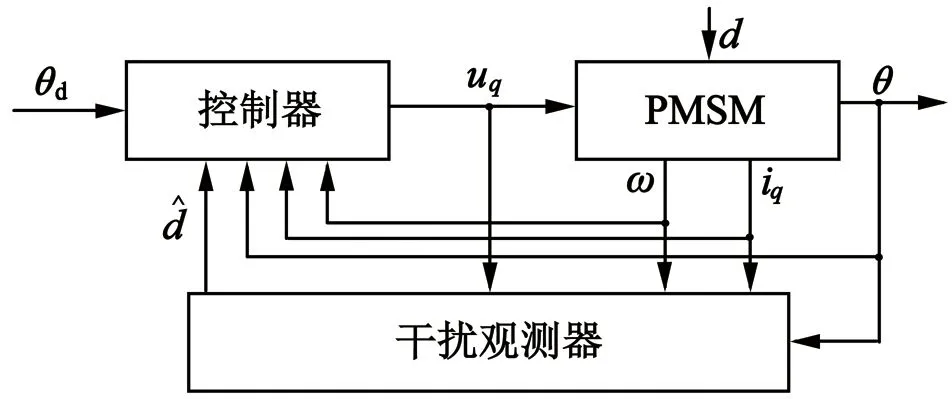
圖1 具有干擾觀測器的控制系統結構
(29)

(30)
式中:k>0為正常數。
定理:針對式(5)~式(7)中的PMSM模型,在不考慮控制器設計的情況下,式(29)、式(30)可以實現PMSM未知項d的估計。
證明:利用式(5)~式(7)和式(29)、式(30),PMSM未知項估計誤差的導數可以表示:
式(31)可以簡化:
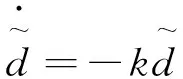
(32)
上述PMSM干擾觀測器的設計具有如下3個方面的優勢:
(1) 干擾觀測器的設計簡單,可以增強系統的抗干擾能力;
(2) 干擾觀測器是指數穩定的,其設計不依賴系統控制器的設計;
(3) 干擾觀測器是基于狀態方程設計的,這使得其穩定性證明變得簡單。
4 仿真分析
用于PMSM仿真模型的參數如表1所示。
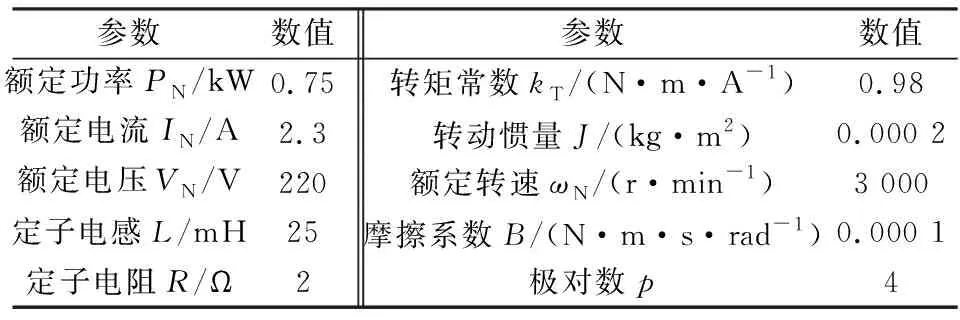
表1 PMSM的模型參數
由表1可以獲得式(5)~式(7)中的模型參數:a1=0.5,a2=4 900,a3=26.1,a4=80,b=40。
4.1 未知參數采用自適應估計方法的仿真
對于未知負載轉矩采用自適應估計的PMSM速度指定位置跟蹤的控制結構如圖2所示。在系統控制器設計中有4個參數k1,k2,k3和k4需要進行調整,4個參數調整原則如下:

圖2 采用自適應估計的PMSM控制系統結構
(1)將k3和k4設定為零,調整參數k1和k2,這種情況屬于采用普通反推控制的位置跟蹤;
(2)將k4都設定為零,保持將k1和k2不變,調整k3,這種情況屬于具有未知負載自適應估計的位置跟蹤;
(3)保持將k1,k2和k3不變,調整k4,這種情況屬于具有速度指定的位置跟蹤。
采用上述的參數調節方法,可以得到控制參數:k1=8,k2=250,k3=3 200,k4=20 000。
4.1.1 負載轉矩為未知常數時的仿真
假定PMSM的負載轉矩為1 N·m,相對于控制器設計來說是未知的。PMSM的給定位置為θd(γ)=sinγ,其中γ為時間的函數,γ的初始值設定為γ(0)=π/2,電機的初始值設定為θ(0)=0。
在第一種情況下,指定速度控制變量vd為vd=10 rad/s,仿真結果如圖3所示。由仿真結果可以得出,穩態位置最大位置跟蹤誤差為0.010 5 rad,最大負載轉矩估計誤差為1.15 mN·m。在第二種情況下,降低指定速度控制變量vd為vd=5 rad/s,仿真結果如圖4所示。由仿真結果可以得出,穩態位置最大位置跟蹤誤差為0.003 35 rad,最大負載轉矩估計誤差為0.54 mN·m。
(a) 參考位置和實際位置
(b) 位置跟蹤誤差
(c) 指定速度與實際速度
(d) 速度誤差
(e) 負載轉矩與估計轉矩
(f) 負載轉矩估計誤差
(a) 參考位置和實際位置

(b) 位置跟蹤誤差
(c) 指定速度與實際速度
(d) 速度誤差
(e) 負載轉矩與估計轉矩
(f) 負載轉矩估計誤差
由第一種情況和第二種情況的仿真可以看出,PMSM的位置能夠跟蹤指定位置信號,通過改變指定速度控制變量vd可以調節位置跟蹤的精度;同時自適應環節可以實現負載轉矩的估計,降低負載轉矩對于位置跟蹤的影響。
4.1.2 負載轉矩為未知變化量時的仿真
假定PMSM的負載轉矩為1~2 N·m的隨機變化轉矩,初始條件與前面一致。
在第三種情況下,指定速度控制變量為vd=10sint,仿真結果如圖5所示。在第四種情況下,降低指定速度控制變量為vd=5sint,仿真結果如圖6所示。
(a) 參考位置和實際位置
(c) 指定速度與實際速度
(d) 速度誤差
(e) 負載轉矩與估計轉矩
(f) 負載轉矩估計誤差
(a) 參考位置和實際位置
(b) 位置跟蹤誤差
(c) 指定速度與實際速度
(d) 速度誤差
(e) 負載轉矩與估計轉矩
(f) 負載轉矩估計誤差
由第三種、第四種情況的仿真可以看出,負載轉矩估計具有較小的誤差,負載的自適應估計對于隨機變化負載的估計也是有效的。
4.2 未知參數采用干擾觀測器方法的仿真
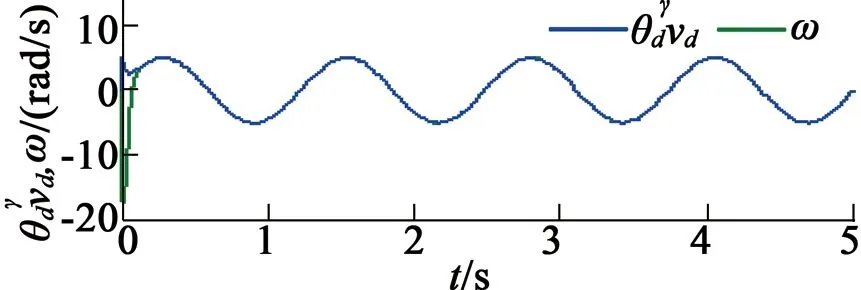
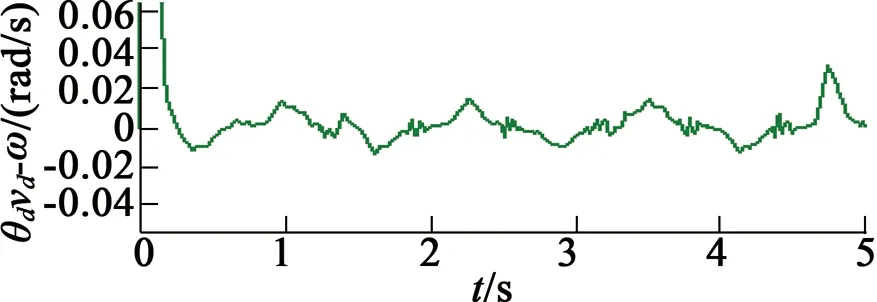
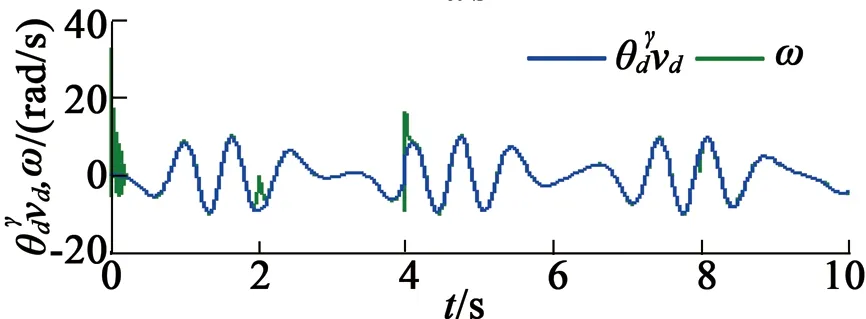
采用干擾觀測器進行負載轉矩估計的PMSM指定速度位置跟蹤的控制方案設計如圖7所示。根據前面的控制參數調節原則,控制參數分別選擇:k1=30,k2=320,k3=5 000,k4=40 000,k=25。指定速度控制變量設定為vd=sin (10t)。
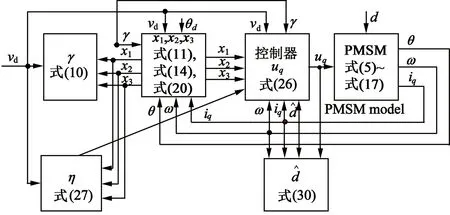
圖7 采用干擾觀測器的PMSM控制系統結構
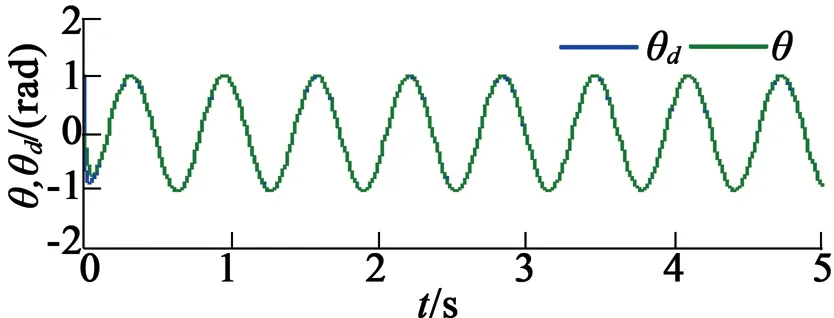
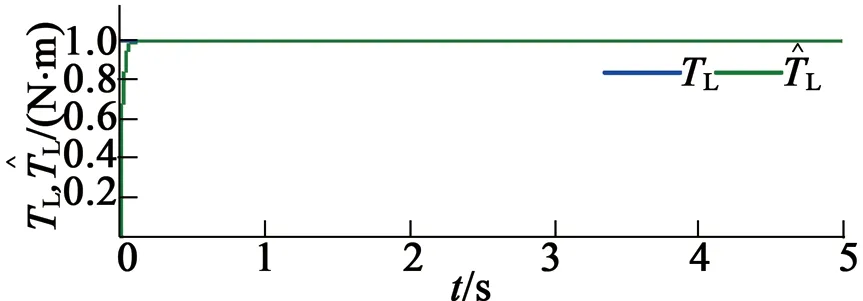
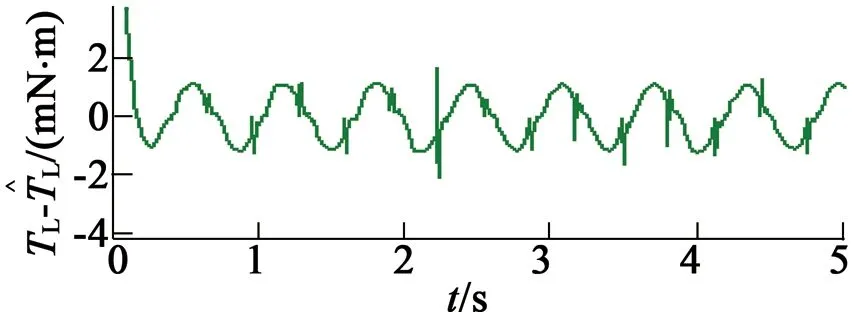
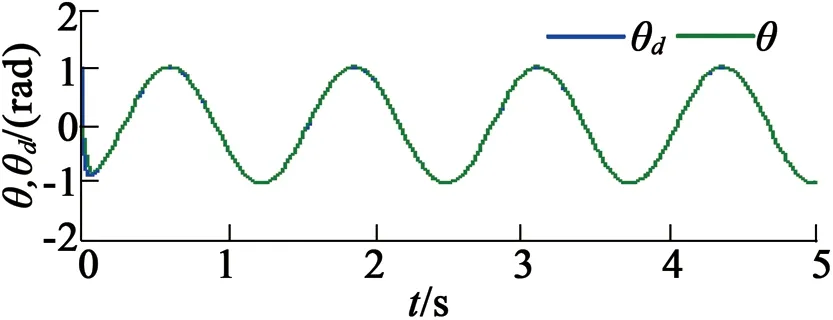
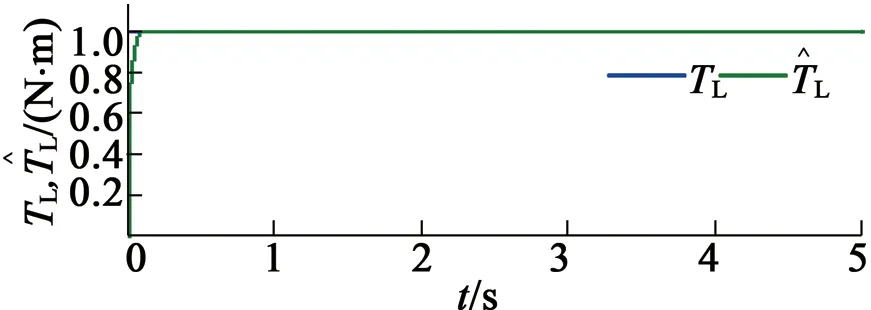
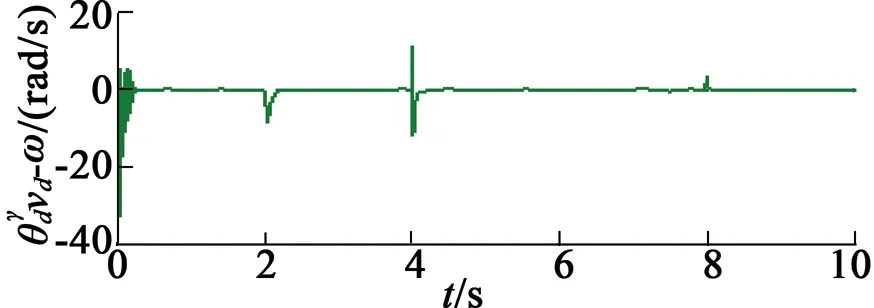
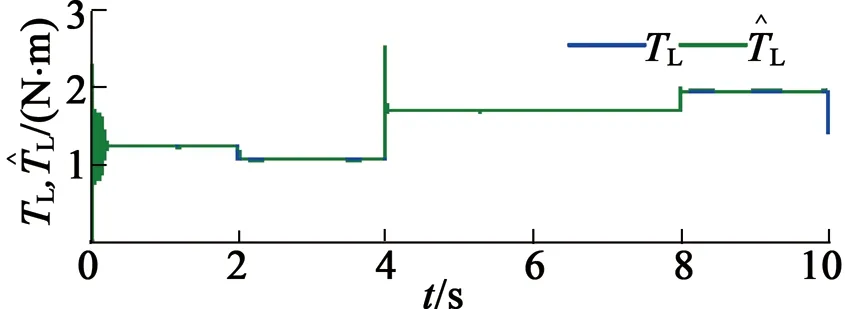
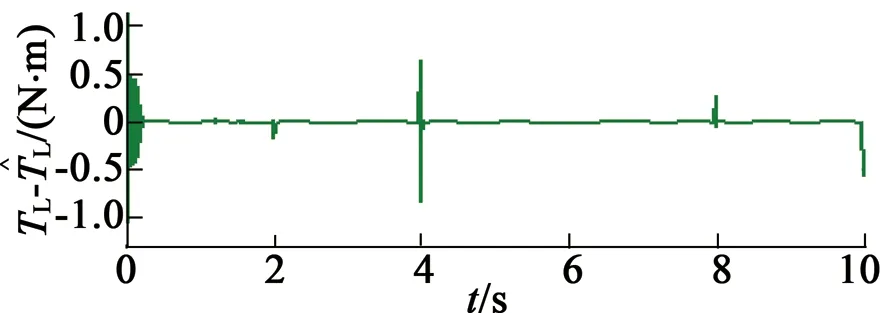
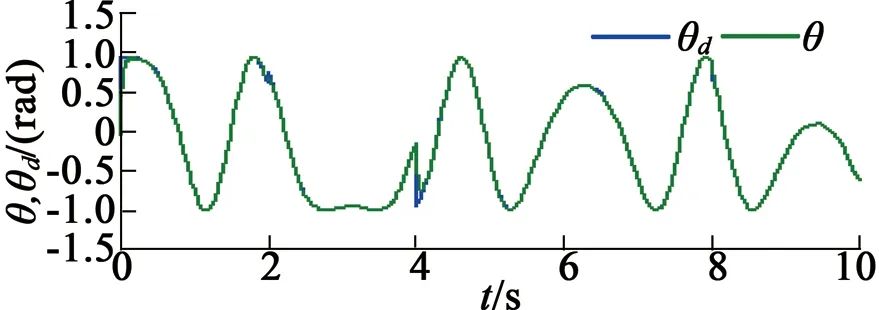
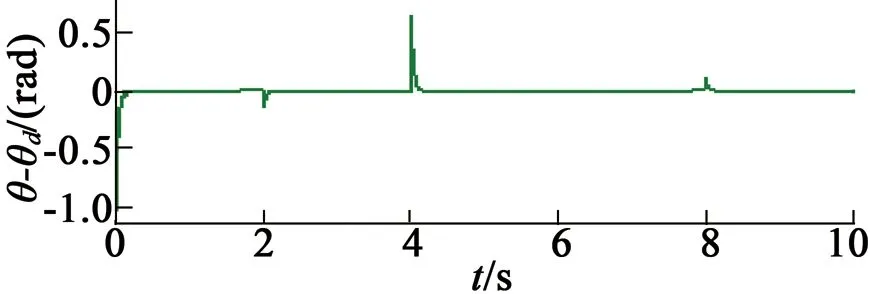
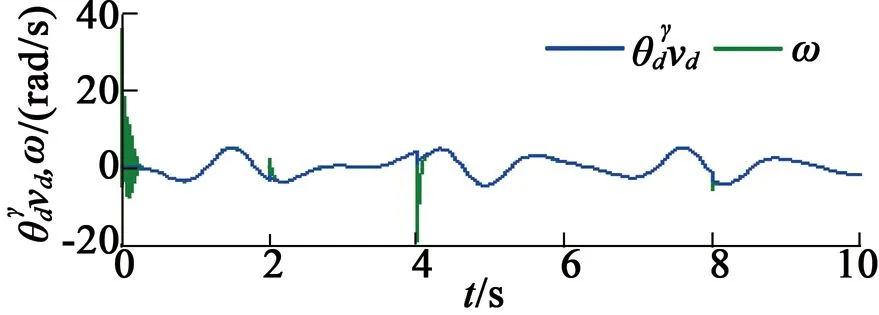
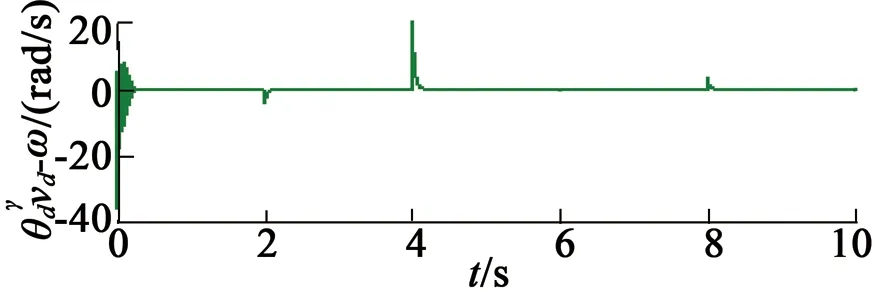
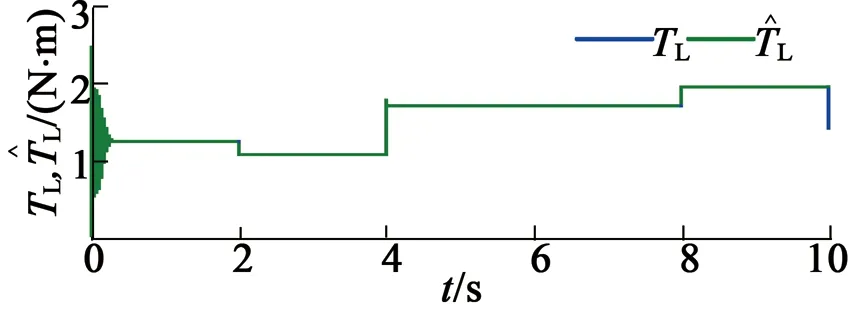
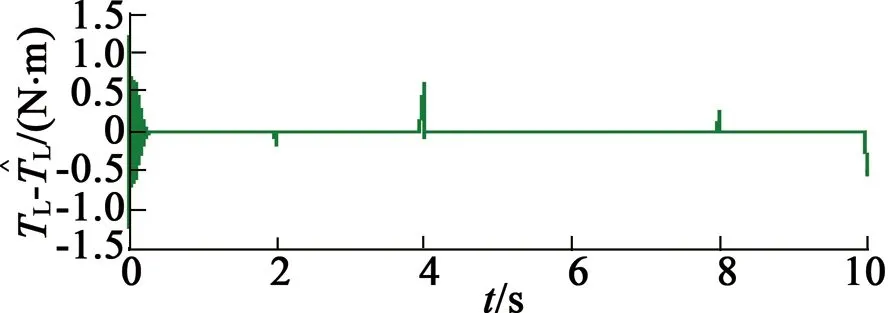
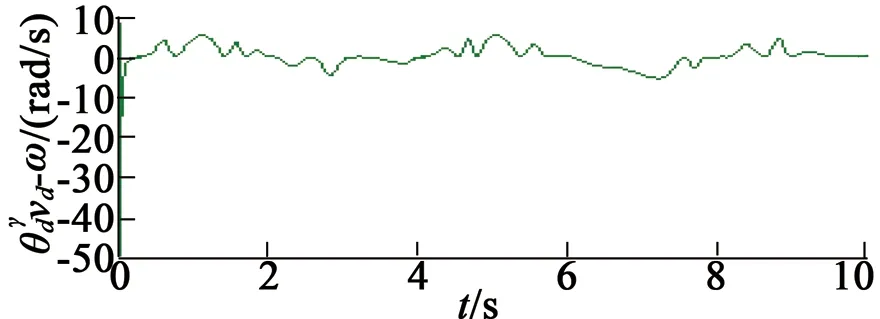
在第五種情況下,未知負載轉矩設定為固定常數TL=1 N·m,仿真結果如圖8所示。在第六種情況下,未知負載轉矩設定為TL=1-cos(πt/2),仿真結果如圖9所示。
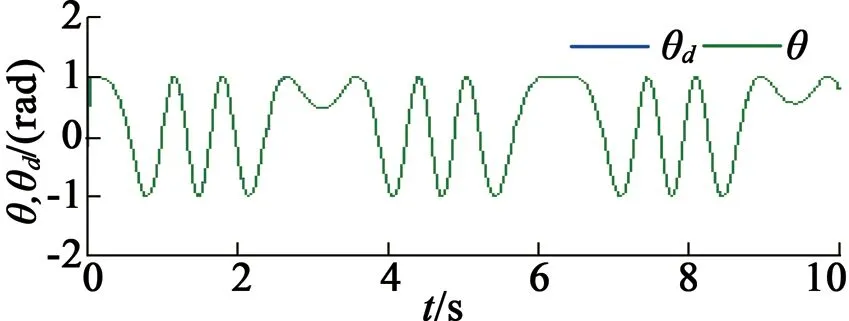
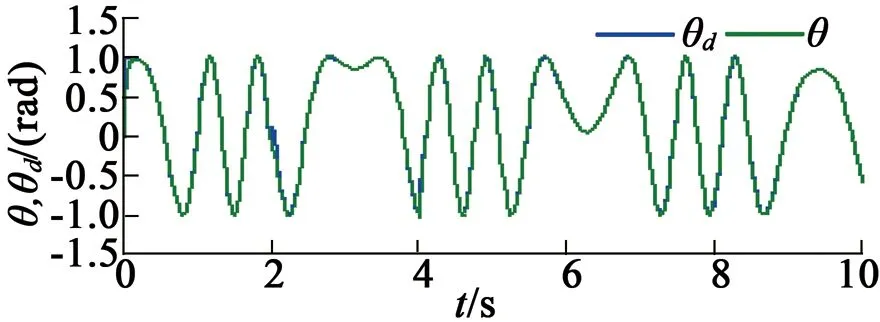
(a) 參考位置和實際位置
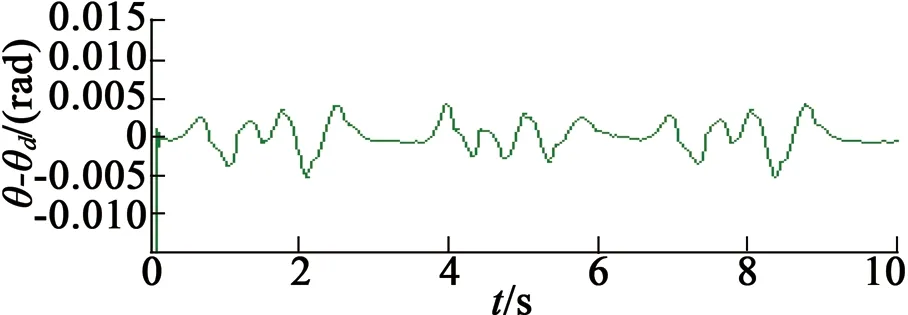
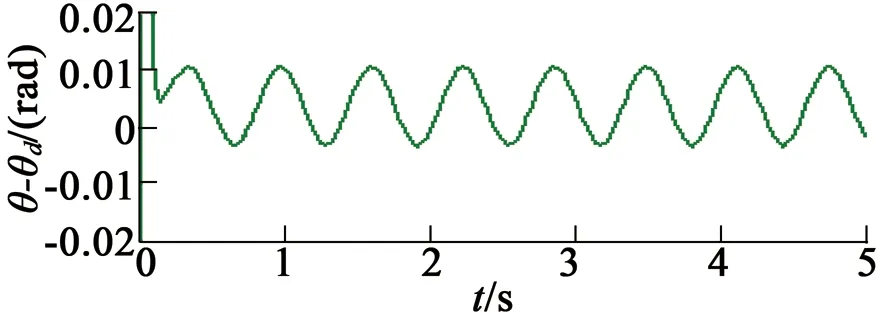
(b) 位置跟蹤誤差
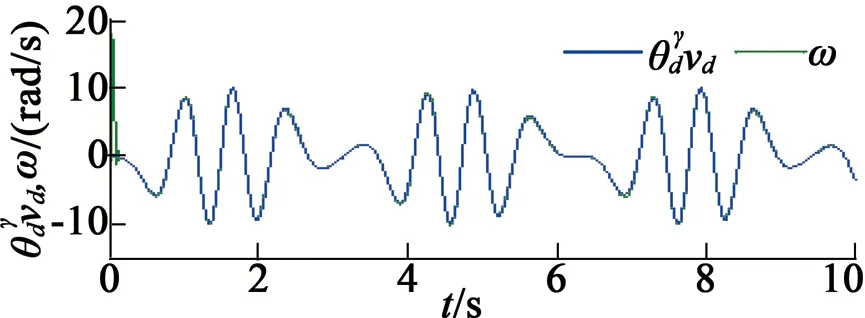
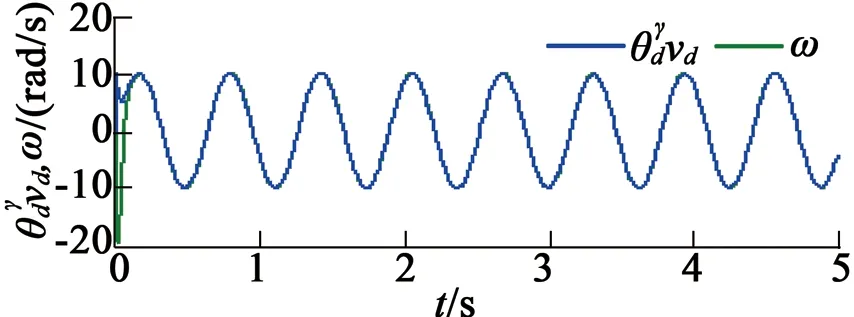
(c) 指定速度與實際速度
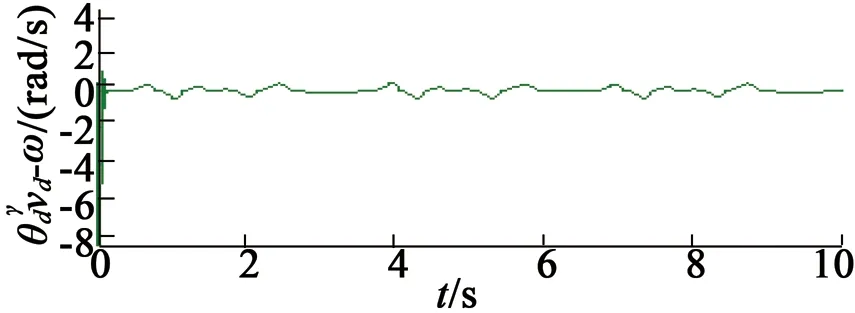
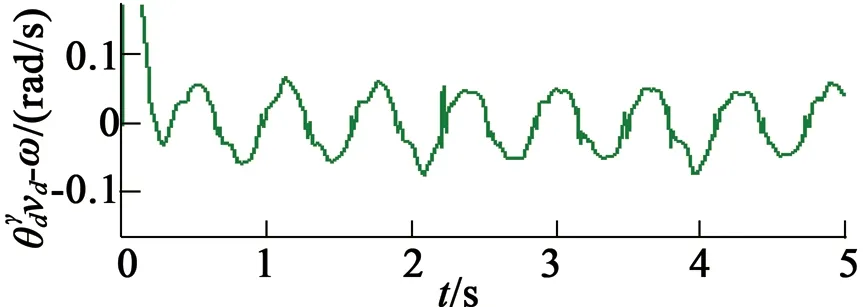
(d) 速度誤差
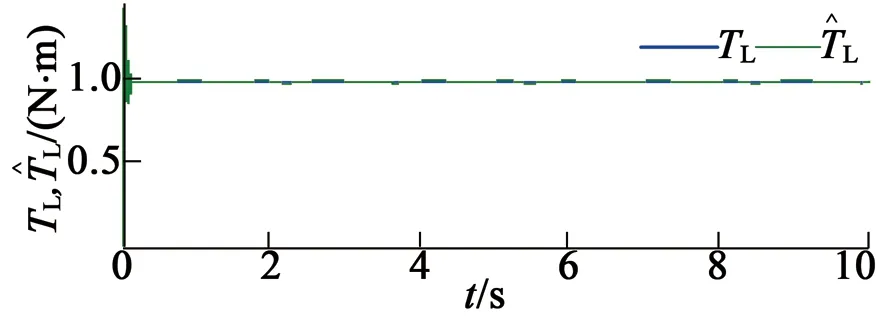
(e) 負載轉矩與估計轉矩
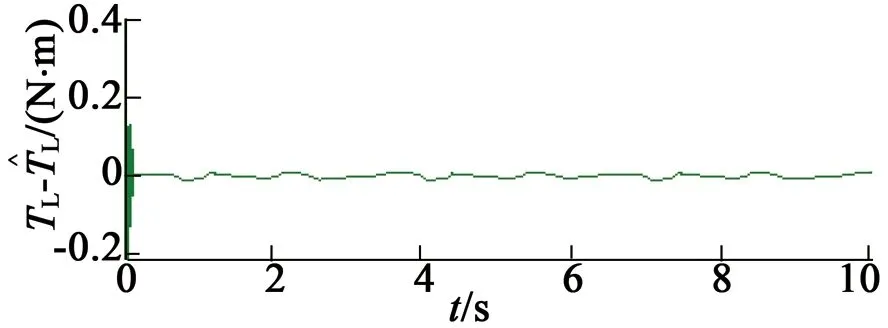
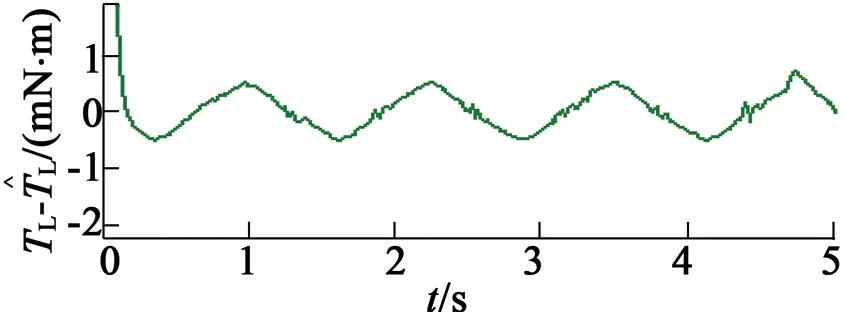
(f) 負載轉矩估計誤差
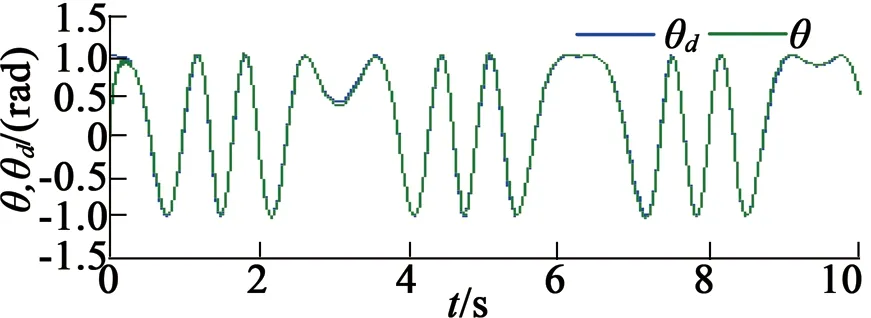
(a) 參考位置和實際位置
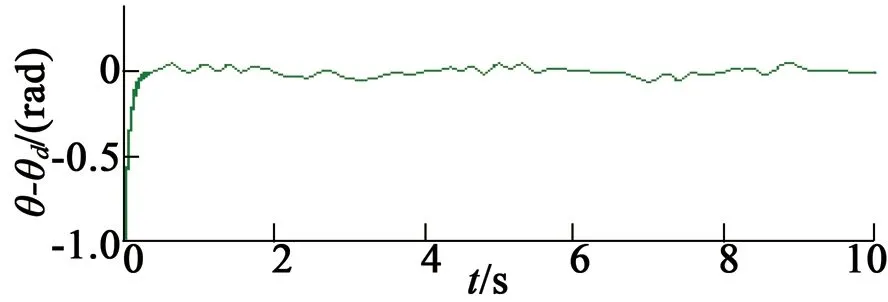
(b) 位置跟蹤誤差
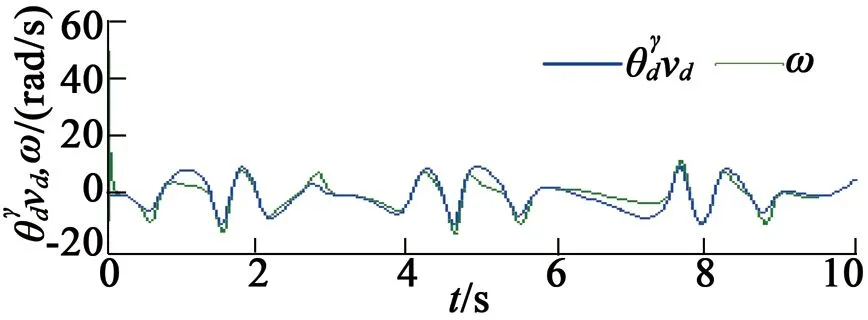
(c) 指定速度與實際速度
(d) 速度誤差
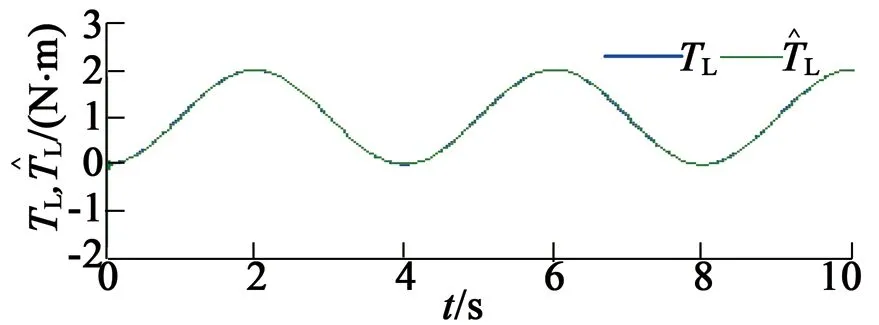
(e) 負載轉矩與估計轉矩
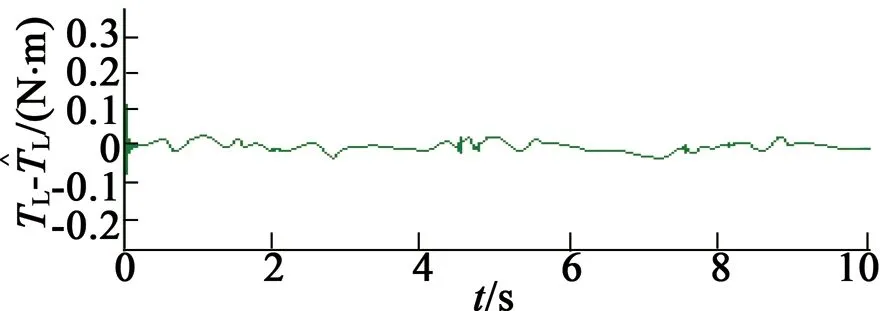
(f) 負載轉矩估計誤差
根據圖8和圖9中的仿真結果,可以得出如下結論:
1) 本文設計的自抗擾觀測器參數調節簡單便捷,相對于自適應估計具有更高的估計精度;
2) 自抗擾觀測器簡化了自適應反推控制設計,提高了位置跟蹤控制的魯棒性能;
3) 自抗擾觀測器可以獨立于控制器的設計,這相對于系統控制設計是非常有價值的。
4.3 仿真結果分析
根據上面各種情況的仿真,可以得出如下結論:
1) 在PMSM的位置跟蹤過程中,通過速度指定方法可以增加位置跟蹤控制的靈活性,速度控制自由度的引入對于調節PMSM位置跟蹤的精度調節很有意義;
2) 基于自適應反推控制可以將速度指定方法引入PMSM位置跟蹤,自適應估計方法可以有效估計未知負載轉矩和指定速度的控制誤差。
3) 自抗擾觀測器可以估計PMSM的負載轉矩,自抗擾觀測器與本文中的自適應相比具有更快了響應速度和更高的估計精度。
5 結 語
本文將速度指定方法引入PMSM的位置跟蹤控制中,實現了PMSM的速度指定位置跟蹤控制。本文的主要貢獻表現在如下方面:
1) 將速度指定控制方法引入PMSM的位置跟蹤控制,速度指定方法將速度控制自由度引入位置跟蹤控制,這可以增加位置跟蹤的靈活性。
2) 自適應反推控制可以將速度指定方法與位置控制器的設計結合起來,同時通過自適應設計可以實現PMSM未知負載轉矩和指定速度控制誤差的自適應估計。
3) 為了進一步提高PMSM位置控制的精度,本文給出了一個新穎的自抗擾觀測器設計方法。該自抗擾觀測器可以獨立于系統控制器進行設計,自抗擾觀測器可以提高PMSM未知負載估計的響應速度和估計精度,這對于提高PMSM位置跟蹤的精度具有重要的意義。
[1] 方一鳴, 任少沖, 王志杰,等. 焦曉紅永磁同步電動機轉速自適應模糊Backstepping 控制[J]. 電機與控制學報,2011,15(6): 98-102.
[2] M. MORAWIEC M. The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter[J]. IEEE Transactions on Industrial Information, 2013, 9(2): 1047-1055.
[3] MOHAMED Y A I. A hybrid-type variable-structure instantaneous torque control with a robust adaptive torque observer for a high-performance direct-drive PMSM [J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2491-2499.
[4] ERROUISSI R, OUHROUCHE M, Chen W H, TRZYNADLOWSKI A M. Robust nonlinear predictive controller for permanent-magnet synchronous motors with an optimized cost function[J]. IEEE Transactions on Industrial Electronics, 2012, 59(7):2849-2858.
[5] GHAFARI-KASHANI A R, FAIZ J, YAZDANPANAH M J. Integration of non-linear H∞ and sliding mode control techniques for motion control of a permanent magnet synchronous motor[J]. IET Electric Power Applications, 2010, 4(4): 267-280.
[6] QI L, SHI H. Adaptive position tracking control of permanent magnet synchronous motor based on RBF fast terminal sliding mode control[J], Neurocomputing, 2013, 115(4):23-30.
[7] PRASHANTH K V, GIRISHA N H. Position control of interior permanent magnet synchronous motor using adaptive backstepping technique[C]//International Conference on Advances in Computing, Communications and Informatics, 2013: 1718-1723.
[8] EL-SOUSY F M. Intelligent optimal recurrent wavelet elman neural network control system for permanent- magnet synchronous motor servo drive[J].IEEE Transactions on Industrial Informatics, 2013, 9(4): 1986-2003.
[9] LIN F J, YANG K J, SUN I F, CHANG J K. Intelligent position control of permanent magnet synchronous motor using recurrent fuzzy neural cerebellar model articulation network[J].IET Electric Power Applications, 2015, 9(3): 248-264.
[10] SKJETNE R, FOSSEN T I, KOKOTOVIC P V. Robust output maneuvering for a class of nonlinear systems[J].Automatica, 2004, 40(3): 373-383.
[11] KOKOTOVIC P V. The joy of feedback: nonlinear and adaptive[J].IEEE Control System Magazine, 1992, 12(3): 7-17.
[12] 王家軍,趙光宙,齊冬蓮.反推式控制在永磁同步電動機速度跟蹤控制中的應用[J].中國電機工程學報,2004,24(8):95-98.
[13] YANG Z J, HARA S, KANAE S. An adaptive robust nonlinear motion controller combined with disturbance observer[J]. IEEE Transactions on Control Systems and Technology, 2010, 18(2): 454-462.
[14] TOMEI P, VERRELLI C M. Observer-based speed tracking control for sensorless permanent magnet synchronous motors with unknown load torque[J]. IEEE Transactions on Automation Control, 2011, 56(6): 1484-1488.
[15] CHEN W H. Disturbance observer based control for nonlinear systems[J]. IEEE/ASME Transactions on Mechatronics, 2004, 9(4): 706- 710.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04