廣播式自動相關監視與二次雷達的數據融合及應用
2018-07-10 06:40:52何東林朱新平
成都大學學報(自然科學版) 2018年2期
唐 勇,何東林,朱新平
(1.成都大學 信息科學與工程學院,四川 成都 610106;2.中國民航局第二研究所 科研開發中心,四川 成都 610041;3.中國民用航空飛行學院 空中交通管理學院,四川 廣漢 618307)
0 引 言
目前,廣播式自動相關監視(Automatic dependent surveillance-broadcast,ADS-B)因具有系統更新頻率高、地面站造價低以及安裝維護簡單等優點,在民航飛機協同監視方面越來越受到重視[1],但因ADS-B為基于衛星定位來實現飛機的監視,其在信號穩定性、完好性及可信性等方面仍有待進一步研究[2-5].同時,國內目前大約有一半的民航客機未安裝ADS-B機載應答設備,而無法實現對民航飛機的完全監視.二次雷達(Secondary surveillance radar,SSR)作為一項成熟可靠的監視技術,在空中交通管制(Air traffic controller,ATC)系統中得到了普遍使用,但SSR系統因數據更新頻率較低、監視誤差較大,且造價高、安裝維護復雜等不足,同時SSR受雷達俯仰角影響而無法對機場場面飛機進行監視[6-7].可以認為,在相當長時間內,ADS-B與SSR都將是民航飛機定位監視的重要手段之一,二者需要互為補充.因此,ADS-B與SSR共同使用的最好方式是進行數據融合,這樣既能發揮ADS-B技術的優點,又能保證SSR監視的穩定可靠.本研究分析了ADS-B與SSR各自的監視特點,提出了一種ADS-B與SSR的數據融合系統模型,探討了ADS-B與SSR的數據融合算法,并利用實測數據對系統進行了驗證.
1 ADS-B與SSR監視特點
1.1 ADS-B監視特點
ADS-B是一種集數據通信、衛星導航和監視于一體的新航行系統先進技術,它將由機載衛星導航設備實時獲取的飛機經度、緯度、高度與速度等定位信息,以及姿態、航班號及地址碼等其他信息定時向空中和地面進行廣播發送,供其他飛機和地面上的用戶接收和顯示.通過空地、空空數據鏈通信,ADS-B不僅可以實現地面對飛機的監視,還可實現飛機與飛機之間的互相監視.隨著新航行技術的發展,ADS-B技術因為造價低、精度高而越來越受到重視,具有廣闊的應用前景[8].
1.2 SSR監視特點
SSR是目前普遍使用的空管監視手段.一方面,它通過向飛機發出詢問信號,機載設備應答詢問信息;另一方面,通過對飛機進行測距和測向,以及機載設備應答的飛機二次代碼和飛行高度,兩者相互協作完成對空中目標的定位.但SSR 系統具有很多局限性:通過無線電測距獲取的目標方位精度有限;機械旋轉掃描方式限制了更新率的提高;無法獲得飛機的意圖、方向及速度等態勢數據.同時,SSR因造價高、維護使用成本高,并且只能監視空域目標,無法對場面目標進行監視,難以滿足未來空中交通管理的發展需求[9].
1.3 ADS-B與SSR信息分類
ADS-B信息的種類主要分為3類:包含目標四維位置和姿態信息的位置報告,包含目標航行信息和飛機標識信息的模式狀態報告,以及包含控制應答和其他輔助信息的勤務報告.而SSR信息主要包括了目標位置、二次雷達代碼、航跡質量等格式化信息.兩類目標信息之間的主要差異[10-13]如表1所示.
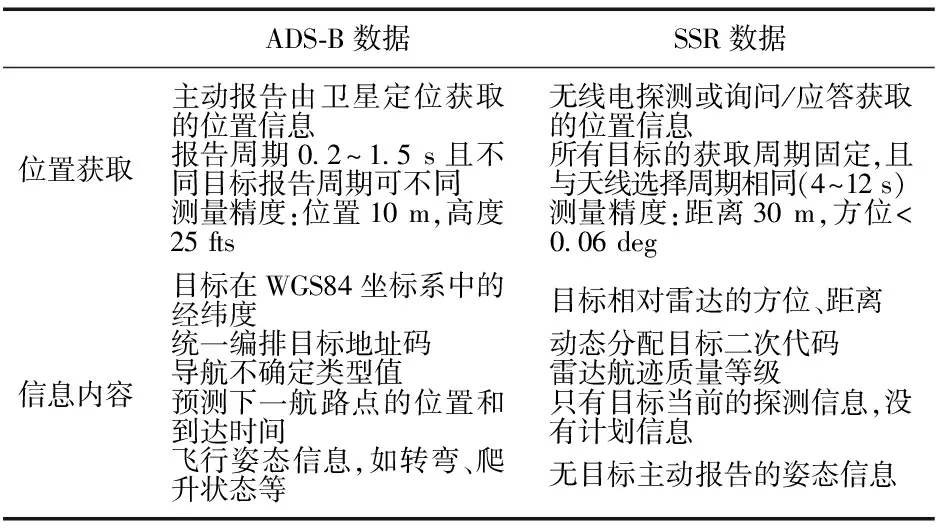
表1 ADS-B與SSR數據信息差異
2 ADS-B與SSR數據融合
2.1 數據融合系統模型
ADS-B與SSR數據融合有多種模型.本研究針對實際應用問題提出一種數據融合系統模型如圖1所示.

圖1ADS-B與SSR數據融合系統模型
本數據融合系統對收到的報文進行類型判斷后分別送入ADS-B與SSR處理通道.ADS-B預處理主要完成報文格式檢查、解碼(通常采用Eurocontrol Asterix Cat021標準格式)、野值剔除、WGS-84坐標轉地心直角坐標等工作;SSR預處理主要完成報文格式檢查、解碼(通常采用Eurocontrol Asterix Cat030標準格式)、野值剔除、雷達極坐標轉地心直角坐標等工作.預相關模塊利用ADS-B報文中的地址碼和SSR報文中的二次代碼進行預相關處理,對已經有融合航跡記錄的數據直接進行融合濾波處理,對未有融合航跡記錄的數據通過關聯模塊進行航跡關聯.初始化模塊負責對未關聯上的數據生成新航跡.航跡管理負責記錄融合航跡,管理航跡生存時間,剔除和更新航跡,調用濾波器進行航跡濾波,產生融合結果輸出.編碼模塊負責把融合結果統一編碼后輸出到ATC系統顯示.濾波模塊采用卡爾曼濾波器完成融合估計.
在本模型中,ADS-B與SSR數據融合還需要解決下面幾個問題:
1)坐標轉換.ADS-B報文采用WGS-84坐標系,而SSR采用極坐標系.對此,可通過坐標轉換把坐標系統一為笛卡爾地心直角坐標系.
2)時間對齊.由于ADS-B與SSR是2個系統,沒有統一的時間基準.因此,在數據融合前必須通過外推和插值等方法把2個系統的傳感器數據報告時間校正到同一時刻.
3)航跡關聯.航跡關聯是為了把ADS-B與SSR對同一目標的觀測航跡進行關聯.在ADS-B數據中飛機被32 bit地址碼唯一標識,而SSR則通過二次代碼標識飛機.對于已形成融合航跡的飛機可以通過地址碼或二次代碼直接關聯,對于未形成融合航跡的飛機可以通過最近領域法、概率數據互聯等方法關聯得到融合航跡[14].
4)融合方式.融合方式分為集中式、分布式、混合式等,其中集中式融合算法有3種,即并行濾波、序貫濾波及數據壓縮濾波[15].
2.2 融合算法
由于ADS-B系統與SSR系統工作時在時間上的不同步,本數據融合系統采用集中式序貫濾波融合算法,則不管是哪個系統觀測,按時間順序,先到的量測點先進行濾波,這樣就省去了時間同步處理,又增強了航跡的連續性.
目標運動方程采用勻加速模型,采用笛卡爾直角坐標系,則狀態方程為,
(1)

(2)
(3)
其中,狀態轉移矩陣與過程噪聲矩陣分別為,
(4)
(5)
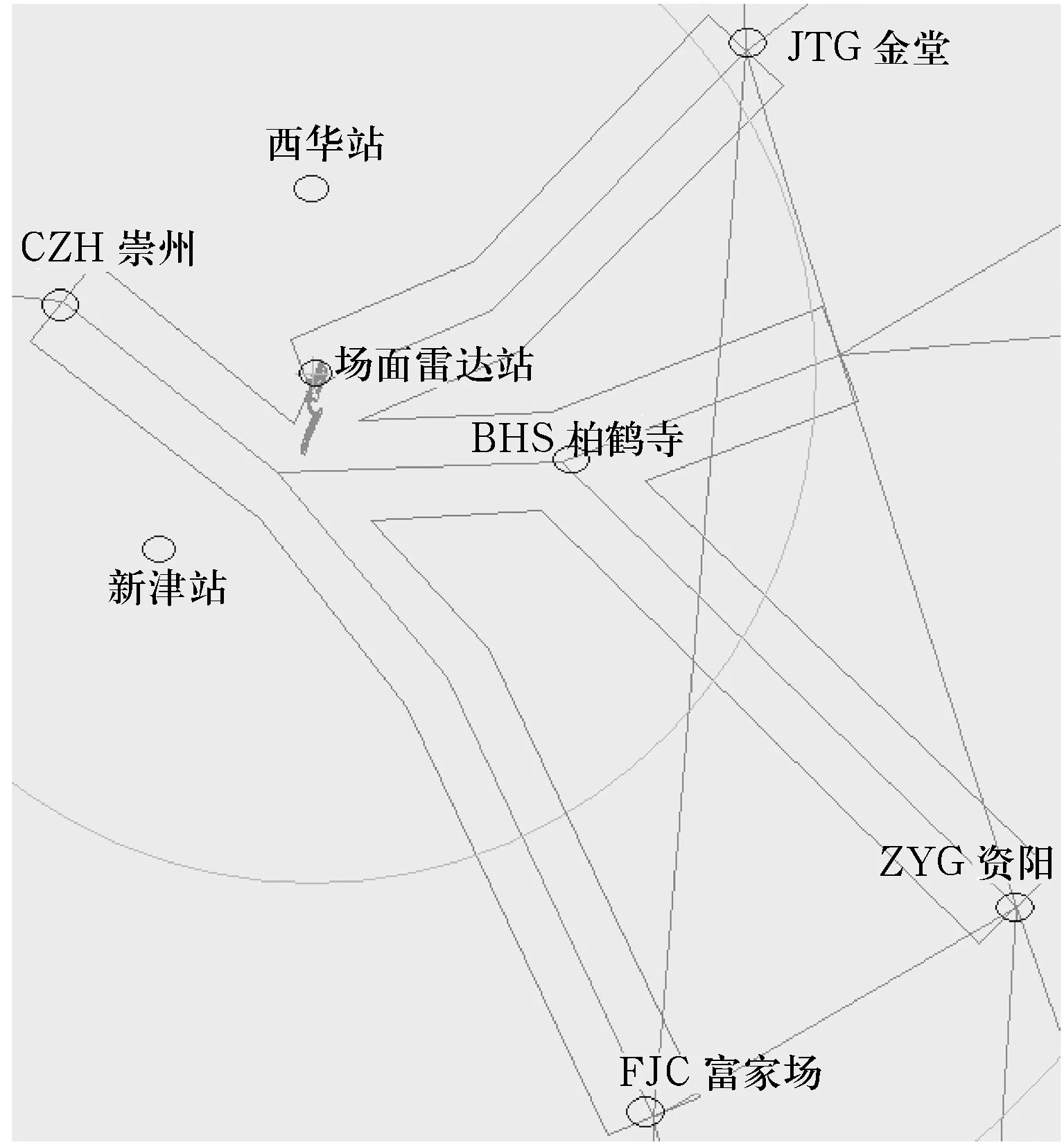
融合中心按照傳感器的序號1→N對融合中心目標運動狀態估值進行序貫更新,傳感器1 (6) (7) (8) 則融合中心最終的狀態估計是, (9) (10) 本數據融合系統在實際數據測試中,通過民航二所在成都雙流國際機場及其周邊安裝的8套(見圖2,圓圈表示地面站位置,折線多邊形表示航空走廊)1090ES ADS-B接收機,對機場場面及周邊300 km空域進行全天候完整監視.ADS-B監視數據通過ADSL、3G、甚高頻等通信方式傳到處理中心.通過多個ADS-B地面站的多重覆蓋監視,解決建筑、山脈等對飛機監視可能造成的無線電遮擋等原因而出現的目標丟失.同時,在雙流機場場面雷達站安裝一部雷神SSR. 本數據融合系統ADS-B與SSR融合數據顯示效果如圖3所示.圖3中,只有數字的標牌表示雷達數據,有航班號的表示ADS-B數據,標牌尾帶“T”的表示ADS-B與SSR融合后的數據. 圖2成都雙流機場及其周邊1090ES ADS-B地面站分布圖 圖3成都雙流機場ADS-B/SSR實測數據融合顯示效果 實際測試數據顯示,由于ADS-B刷新率和監視精度都遠高于SSR,在飛行目標同時被ADS-B與SSR監視的情況下,融合輸出的精度和刷新率都和ADS-B接近.而當目標只被ADS-B或SSR其中一種傳感器監視時,融合系統給出的是這種傳感器的濾波輸出.不管飛機機載設備情況如何(有或無SSR、ADS-B應答機),本數據融合系統都能給出統一航跡. 本研究提出了一種采用集中式序貫濾波融合算法的ADS-B與SSR數據融合系統,利用成都雙流國際機場及周邊安裝的8個1090ES ADS-B地面站和1部雷神SSR同時監視數據,并進行了數據融合驗證.通過實測數據驗證,本數據融合系統具備以下特點:不受ADS-B或SSR某類監視數據缺失影響(不同機載設備),都能給出統一航跡;提高了SSR監視的精度和更新率;對SSR場面監視盲區進行了補充覆蓋,實現了從航路到場面的完整及連續監視;統一編碼輸出,兼容現有ATC顯示系統數據格式.

3 系統數據測試

4 結 論
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
中華手工(2017年2期)2017-06-06 23:00:31
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中外會展(2014年4期)2014-11-27 07:46:46
