跟蹤制導(dǎo)雷達(dá)交叉極化測角誤差分析
2018-07-12 12:25:48趙迎超
火控雷達(dá)技術(shù) 2018年2期
韓 星 周 宇 趙迎超 魯 金
(1.西安電子工程研究所 西安 710100;2.中國人民解放軍63850部隊(duì) 吉林 白城 137001)
0 引言
制導(dǎo)精度是跟蹤制導(dǎo)雷達(dá)的關(guān)鍵指標(biāo),由目標(biāo)跟蹤精度和導(dǎo)彈測量精度決定。影響制導(dǎo)精度因素眾多,根據(jù)產(chǎn)生原因可歸為與雷達(dá)設(shè)備有關(guān)的誤差、與目標(biāo)有關(guān)的誤差、坐標(biāo)傳遞和工具方法誤差、多路徑誤差以及與電磁波傳播相關(guān)的誤差等幾類[1]。目標(biāo)跟蹤精度分析[2]較為完備,本文不再贅述。目標(biāo)測量時(shí),由于目標(biāo)散射特性導(dǎo)致回波極化純度下降,但是匹配極化分量仍是主要分量,由正交極化回波產(chǎn)生的串?dāng)_通常可以忽略不計(jì)[3]。導(dǎo)彈測量時(shí),彈上應(yīng)答機(jī)的回波極化特性隨導(dǎo)彈姿態(tài)變化,極端情況下會(huì)出現(xiàn)交叉極化的情況,此時(shí)由交叉極化引起的串?dāng)_將會(huì)嚴(yán)重影響導(dǎo)彈測角性能,甚至導(dǎo)致目標(biāo)丟失[3]。關(guān)于交叉極化對(duì)雷達(dá)測角精度影響的文獻(xiàn)較少,對(duì)制導(dǎo)精度的分析鮮有提及。本文利用空域極化特性,分析無線電指令制導(dǎo)體制下交叉極化對(duì)導(dǎo)彈測角精度的影響,為該類系統(tǒng)設(shè)計(jì)提供依據(jù)。
1 空域極化特性分析
1.1 天線極化純度
天線設(shè)計(jì)發(fā)射或接收的電磁波極化方式稱為期望極化,與這個(gè)期望極化正交的極化稱為交叉極化。實(shí)際天線由于形狀、尺寸、加工誤差以及饋源偏焦等因素存在一定的正交極化耦合度,其輻射電磁波會(huì)包含一些不希望的極化分量,導(dǎo)致天線極化純度下降[4]。利用交叉極化鑒別率(XPD)描述天線極化純度:
(1)
式中E和EX分別為天線主極化電平和交叉極化電平。交叉極化鑒別率越小,說明天線的寄生極化分量越少,天線極化“越純”。
1.2 空域極化特性
天線極化是一個(gè)空域變量,激勵(lì)電流確定后,天線輻射場和有效長度與該測量點(diǎn)的空間角坐標(biāo)有關(guān)。把天線輻射電磁波的極化在空間的演化、分布特性稱之為天線空域極化特性[4],它表征了天線極化在空域上的演變規(guī)律。Hanle認(rèn)為用正交圓極化接收的方法來抗雨和云等氣象雜波,實(shí)際效果常低于預(yù)想結(jié)果[5],其原因即可歸結(jié)為空域極化特性使極化性能改變所致。
通過分析空域交叉極化鑒別量隨天線掃描時(shí)的變化規(guī)律能夠確定天線的變極化特性,也就是極化比隨空域角θ、φ的變化規(guī)律。以拋物面天線為例[6]。通常情況下,拋物面天線的輻射場可表示為:
(2)
(3)
其中fx,fy為面積分可表示為:
(4)
(5)
通過上式可求得該拋物面天線的空域極化比為:
(6)
從式(6)可以看出,拋物面天線的空域極化比與k=fy/fx、cosθ和tgφ有關(guān),圖1為拋物面天線交叉極化比隨測量點(diǎn)角度的變化規(guī)律。
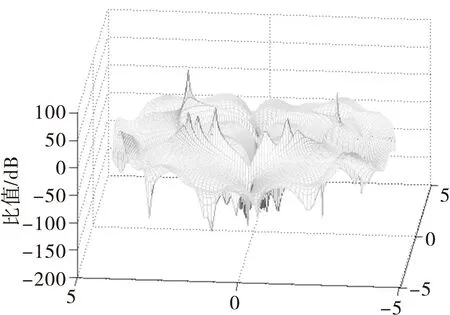
圖1 拋物面天線交叉極化比
用交叉極化鑒別率來描述拋物面天線的極化純度,可表示為:
(7)
1.3 空域極化特性對(duì)導(dǎo)彈測角的影響
跟蹤制導(dǎo)雷達(dá)通過測量彈上應(yīng)答機(jī)回波確定導(dǎo)彈空間位置,導(dǎo)彈發(fā)射時(shí)會(huì)偏離雷達(dá)軸向飛行,由于應(yīng)答信號(hào)發(fā)射天線與導(dǎo)彈剛性連接,應(yīng)答機(jī)回波空域角隨導(dǎo)彈軸向姿態(tài)變化。跟蹤制導(dǎo)雷達(dá)測量導(dǎo)彈示意如圖2所示。
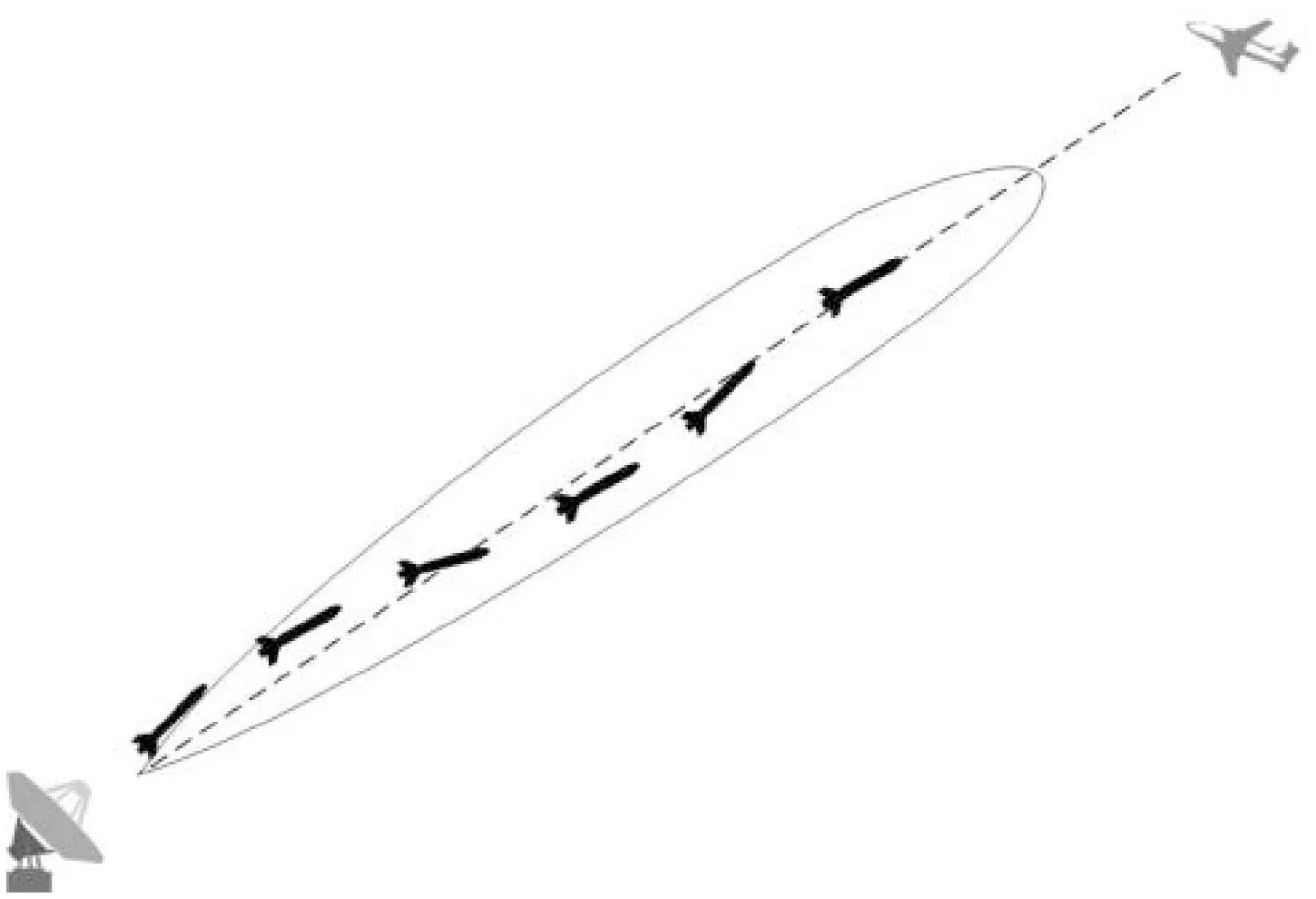
圖2 制導(dǎo)雷達(dá)測量導(dǎo)彈示意圖
跟蹤制導(dǎo)雷達(dá)采用筆狀波束精確跟蹤目標(biāo),導(dǎo)彈在雷達(dá)跟蹤波束內(nèi)飛行,由于跟蹤制導(dǎo)雷達(dá)波束較窄,此時(shí)認(rèn)為導(dǎo)彈未偏離制導(dǎo)雷達(dá)電軸,跟蹤制導(dǎo)雷達(dá)天線空域特性對(duì)測量影響較小,交叉極化分量主要由彈上應(yīng)答機(jī)發(fā)射天線姿態(tài)變化引起。當(dāng)導(dǎo)彈姿態(tài)在空中發(fā)生變化,或?qū)棽捎觅x旋方式時(shí),彈上應(yīng)答天線空域極化特性將產(chǎn)生非期望的極化分量,在某種特殊條件下,甚至?xí)a(chǎn)生交叉極化現(xiàn)象,導(dǎo)致雷達(dá)對(duì)導(dǎo)彈的測角精度出現(xiàn)大幅惡化。
2 交叉極化誤差分析
2.1 交叉極化誤差分析
由于雷達(dá)天線存在交叉極化分量,彈上信標(biāo)回波的正交分量會(huì)在天線輸出端產(chǎn)生不希望的響應(yīng),交叉極化分量引起的指向誤差和天線的極化隔離度及目標(biāo)散射的正交極化分量有關(guān)。由天線交叉極化耦合產(chǎn)生的測角誤差為[7]:
(8)
式中,Δc/Σ是差通道輸出的交叉極化分量與和通道正常極化分量之比,σp/σc是目標(biāo)散射的正常極化分量與交叉極化分量之比,θ3為3dB波束寬度,km為測角斜率。通過上述分析,在制導(dǎo)雷達(dá)中,交叉極化分量由空域極化比P替代,此時(shí)由交叉極化引起的測角誤差可表示為:
(9)
跟蹤制導(dǎo)雷達(dá)導(dǎo)彈測角誤差與通道交叉極化分量和空域極化比相關(guān)。對(duì)于目標(biāo)測量通道,跟蹤制導(dǎo)雷達(dá)Δc/Σ分量一般可以做到-30dB,σp/σc一般為6dB,此時(shí)交叉極化對(duì)測角影響通常可以忽略不計(jì)。對(duì)導(dǎo)彈測量通道,當(dāng)彈上發(fā)射天線空域極化特性帶來的空域極化比會(huì)顯著惡化,此時(shí)由于交叉極化帶來的測角誤差將會(huì)達(dá)到波束寬度的二十分之一甚至十分之一。提高雷達(dá)通道極化隔離度、減小導(dǎo)彈偏軸角度,避免空域極化特性下降是降低跟蹤制導(dǎo)雷達(dá)導(dǎo)彈測角誤差的有效途徑。
2.2 試驗(yàn)數(shù)據(jù)
利用兩部相控陣?yán)走_(dá)進(jìn)行導(dǎo)彈測角,寬波束雷達(dá)制導(dǎo)波束寬度10°,作為初制導(dǎo)用于導(dǎo)彈發(fā)射后的捕獲,窄波束雷達(dá)制導(dǎo)波束寬度為2.4°,作為末制導(dǎo)用于導(dǎo)彈精確制導(dǎo)。兩部雷達(dá)同時(shí)測量導(dǎo)彈,制導(dǎo)控制計(jì)算機(jī)根據(jù)一定的交接班條件分別使用兩部雷達(dá)測角數(shù)據(jù)控制導(dǎo)彈飛行。
靜態(tài)測試時(shí)導(dǎo)彈相對(duì)雷達(dá)電軸偏離一定角度并固定,彈上應(yīng)答機(jī)和地面天線均為圓極化天線,此時(shí)寬、窄波束雷達(dá)導(dǎo)彈測角數(shù)據(jù)穩(wěn)定,其誤差表現(xiàn)為隨機(jī)特性,如圖3、圖4所示,其中橫軸為時(shí)間,單位為幀,每幀間隔0.02s,縱軸為角誤差,單位為密位(以下各圖坐標(biāo)定義和單位相同)。當(dāng)彈體按4Hz周期旋轉(zhuǎn),應(yīng)答機(jī)天線隨彈體旋轉(zhuǎn)。通過圖5、圖6可以看到,寬、窄波束雷達(dá)均呈現(xiàn)與旋轉(zhuǎn)周期一致的測角誤差變化,交叉極化比周期變化會(huì)產(chǎn)生測角誤差。更換彈上應(yīng)答機(jī)天線,提高天線軸比。圖7為采用彈上應(yīng)答機(jī)天線時(shí)跟蹤制導(dǎo)雷達(dá)測角誤差,圖8為提高天線軸比后測試數(shù)據(jù),通過對(duì)比可以看到提高天線軸比后該測角誤差降低。
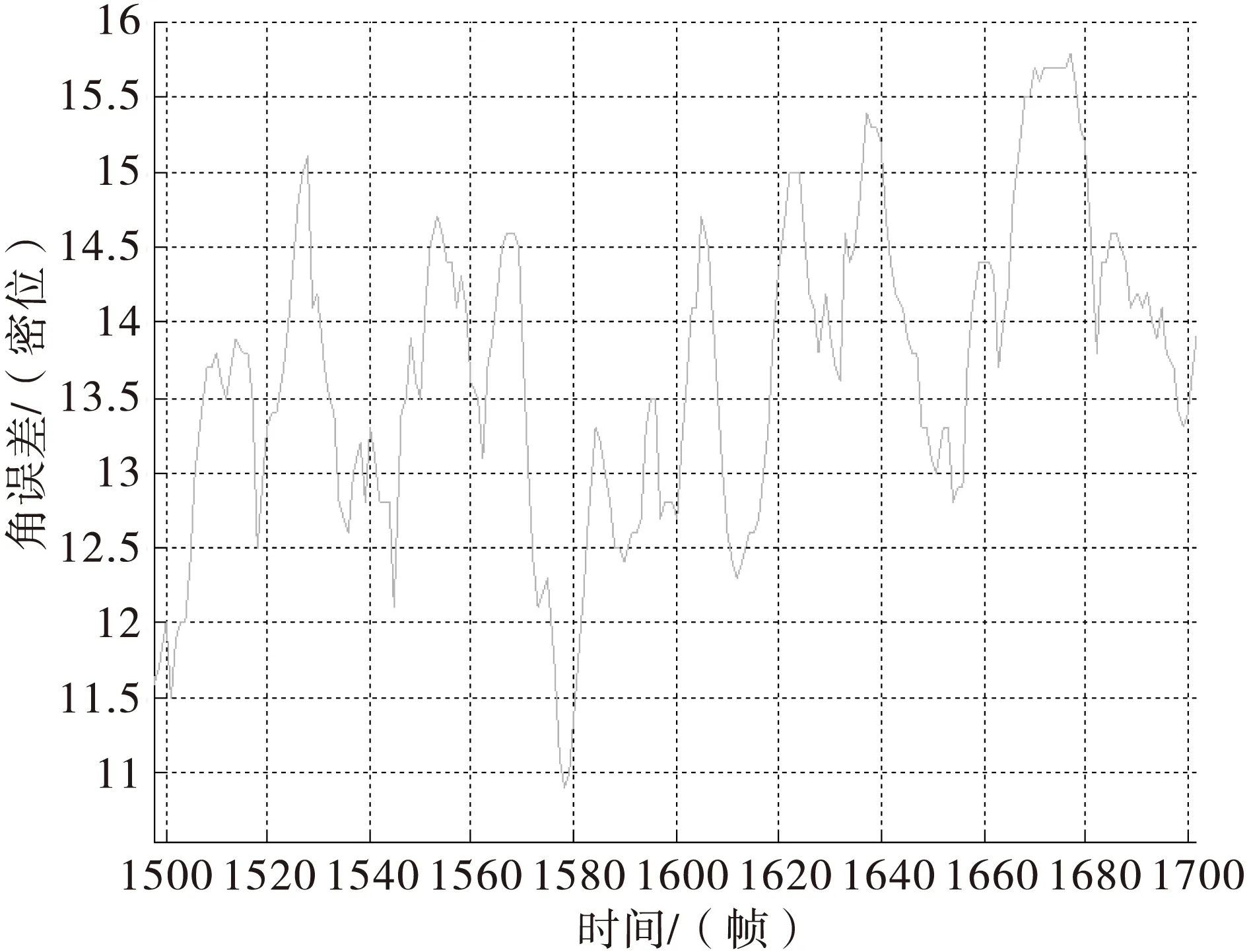
圖3 寬波束靜態(tài)測試圖

圖4 窄波束靜態(tài)測試圖
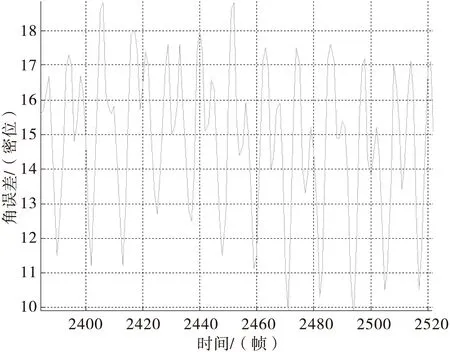
圖5 寬波束動(dòng)態(tài)測試圖
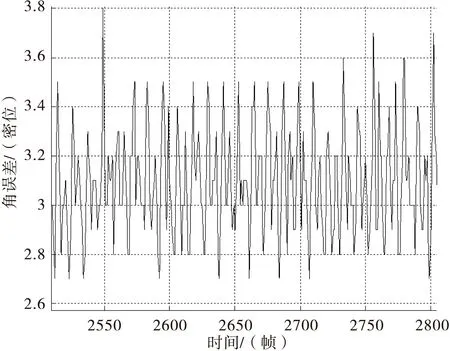
圖6 窄波束動(dòng)態(tài)測試圖
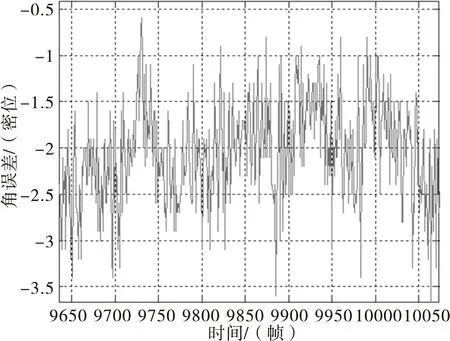
圖7 不同軸比測角誤差1
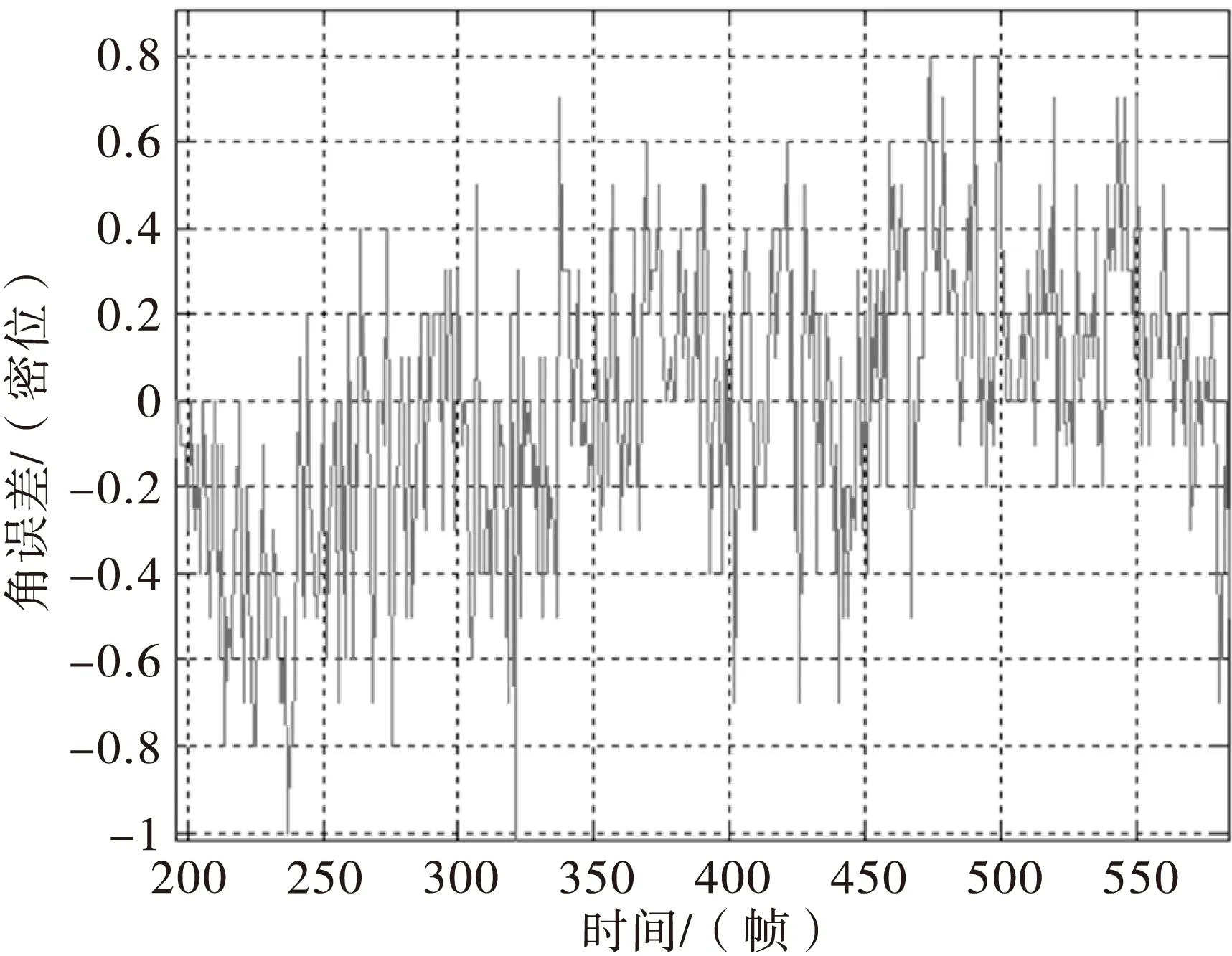
圖8 不同軸比測角誤差2
動(dòng)態(tài)測試采用導(dǎo)彈實(shí)射方式,導(dǎo)彈在筒內(nèi)賦旋、離筒后相對(duì)雷達(dá)電軸有一定的散布角。當(dāng)導(dǎo)彈接收制導(dǎo)數(shù)據(jù)向目標(biāo)飛行時(shí),其軸向趨于雷達(dá)電軸方向。導(dǎo)彈飛行偏離雷達(dá)電軸角度如圖9所示。
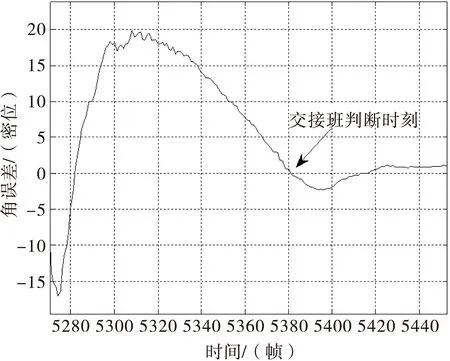
圖9 導(dǎo)彈全程飛行測角曲線
圖10和圖11中虛線為寬波束雷達(dá)測角曲線、實(shí)線為窄波束雷達(dá)測角曲線。圖10為導(dǎo)彈飛行初始階段由于彈體姿態(tài)角變化較大,交叉極化比變化明顯,此時(shí)由交叉極化帶來的導(dǎo)彈測角誤差較大,其測角誤差變化與彈體旋轉(zhuǎn)周期完全吻合。窄波束在導(dǎo)彈偏離軸向角度較大時(shí)也存在該現(xiàn)象。圖11為導(dǎo)彈末制導(dǎo)飛行階段,此時(shí)導(dǎo)彈軸向偏離角度較小,寬、窄波束雷達(dá)測角數(shù)據(jù)均沒有明顯的周期性測角誤差,此時(shí)信噪比和軸系偏差是誤差的主要來源。

圖10 導(dǎo)彈初始段測角曲線
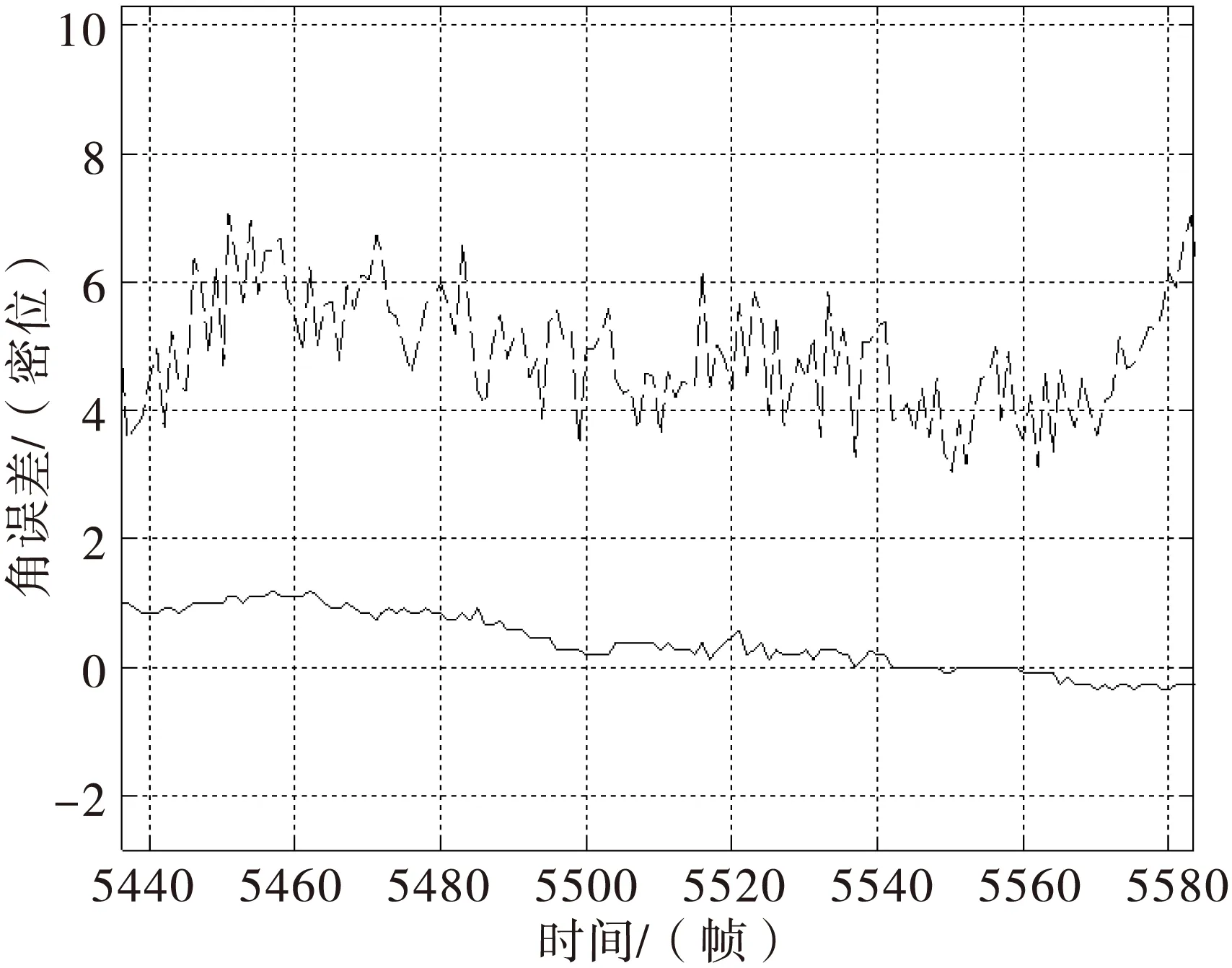
圖11 導(dǎo)彈末段測角曲線
根據(jù)實(shí)測導(dǎo)彈飛行數(shù)據(jù)可以看出,由交叉極化比引起的測角誤差會(huì)對(duì)導(dǎo)彈寬窄波束交接班產(chǎn)生不利影響。設(shè)計(jì)時(shí)應(yīng)考慮彈體散布,避免大偏離角姿態(tài)時(shí)進(jìn)行交接班。同時(shí),在系統(tǒng)設(shè)計(jì)時(shí),應(yīng)在波束覆蓋角度滿足使用要求條件下盡可能減小初制導(dǎo)雷達(dá)波束寬度,以提高測角性能。
4 結(jié)束語
本文通過對(duì)跟蹤制導(dǎo)雷達(dá)空域極化特性分析,
給出其對(duì)導(dǎo)彈測角精度的影響,并通過分析其原理給出降低該誤差的設(shè)計(jì)原則,最后利用不同波束寬度、不同極化隔離度的跟蹤制導(dǎo)雷達(dá)對(duì)導(dǎo)彈進(jìn)行測量,證明該分析原理正確、設(shè)計(jì)原則有效。由于空域極化特性在系統(tǒng)應(yīng)用中具有時(shí)變特點(diǎn),其進(jìn)一步分析應(yīng)結(jié)合空域瞬態(tài)極化特性進(jìn)行。同時(shí)對(duì)不同體制的應(yīng)答天線和測角天線,其空域極化特性存在差異,其交叉極化測角誤差需結(jié)合相應(yīng)系統(tǒng)進(jìn)行。
