VEX世界冠軍(高中組)
——贏在搭建
2018-07-12 01:08:10孫思皓北京工大附中高二一班
數(shù)碼世界 2018年6期
關(guān)鍵詞:系統(tǒng)
孫思皓 北京工大附中高二.一班
學(xué)校開展機(jī)器人社團(tuán),深知學(xué)習(xí)機(jī)器人重要性的我積極參加了,于是也就開始了VEX機(jī)器人學(xué)習(xí)生活,女孩子學(xué)智能機(jī)器人可謂是“欲渡黃河冰塞川,將登太行雪滿山”苦不堪言,要想學(xué)懂且再搭建個(gè)參賽的機(jī)器人就更是“蜀道之難,難于上青天”。一年半的期間利用了所有能利用的時(shí)間進(jìn)行學(xué)習(xí),走著、坐著、躺著、睡著滿腦子都是機(jī)器人。編程設(shè)計(jì)時(shí)就得把自己當(dāng)成一名計(jì)算機(jī)行家,深挖腦洞的展開抽象思維;動(dòng)手搭建時(shí)完全就是車間工人,動(dòng)作要沉穩(wěn)和精準(zhǔn);調(diào)試時(shí)完全就是一名維修工程師,練出慧眼識珠的本領(lǐng)來找錯(cuò)、糾錯(cuò);操盤時(shí)就像個(gè)賽車手,沉著穩(wěn)定達(dá)到知己知彼百戰(zhàn)不殆。足不出戶極大的鍛煉了我的想象能力、動(dòng)手能力、心理素質(zhì)及全身心投入的專注力,稱得上是課本之外的別有一翻風(fēng)味的學(xué)習(xí)歷練之旅。學(xué)校的這一社團(tuán)學(xué)習(xí)過程拓展了我們學(xué)生對科學(xué)、技術(shù)、工程和數(shù)學(xué)領(lǐng)域的興趣,激發(fā)了我們的科技潛能,提高并促進(jìn)我們的團(tuán)隊(duì)合作精神、領(lǐng)導(dǎo)才能和解決問題能力,也成就了我們的科技創(chuàng)新夢想!
誠然,剛?cè)腴T時(shí),老師會(huì)給講一些基礎(chǔ)和理論,也要學(xué)習(xí)幾周機(jī)器人的理論知識和學(xué)習(xí)它的重要意義,最重要的是我的老師是教歷史的機(jī)器人老師,真的是從歷史長河的角度挖掘出每位學(xué)生的興趣和積極性,邊理論邊實(shí)踐,還時(shí)常用描述賽場的激烈場面和駕馭機(jī)器人打敗對手的無人超躍感,把我們每位學(xué)生的積極拉到了頂峰,于是在王老師的代領(lǐng)下,按大賽的要求設(shè)計(jì)編程,然后精心搭建,再反復(fù)調(diào)試,達(dá)到大賽的標(biāo)準(zhǔn)能夠自動(dòng)程序控制,又能通過遙控制在特定區(qū)場地進(jìn)行特定的賽程,最后披星戴月的訓(xùn)練達(dá)到熟能生巧的地步去參賽。
我們團(tuán)隊(duì)先后參加市賽、大區(qū)賽、國賽、亞洲賽、世界錦標(biāo)賽9場,分別獲得過北京市科協(xié)會(huì)朝陽區(qū)二等獎(jiǎng)和一等獎(jiǎng),北京市教委VEX智能機(jī)器人大賽高中組第一名,全國VEX智能機(jī)器人大賽高中組銀獎(jiǎng),亞太區(qū)VEX智能機(jī)器人大賽高中組金獎(jiǎng),最后在全球1400支隊(duì)伍中,突破資格賽、復(fù)賽、以分區(qū)冠軍進(jìn)入總決賽,最終“千淘萬漉雖辛苦,吹盡狂沙始到金”的奪得2017年機(jī)器人世界錦標(biāo)賽高中組總冠軍好成績。回想全程,我們在團(tuán)隊(duì)協(xié)作下還是贏在搭建的機(jī)器人穩(wěn)定性好。
最初只是在電視和展櫥中見過機(jī)器人,對它的全部構(gòu)造并不詳知,感覺和人一樣吧,具有智能的大腦和五腹六臟,外殼和靈活的四肢。當(dāng)懷著一顆好奇心走進(jìn)實(shí)驗(yàn)室時(shí),由陌生到熟悉,幾周后就由衷的喜歡了,也就有了以下一起成長的過程。機(jī)器人有這么幾大部份1、主控系統(tǒng)、2、電機(jī)、3底盤、4遙控系統(tǒng)、5防摔系統(tǒng)、6連接線和操作部件、7顯視模塊。下面用圖文并茂的方式介紹一下2017年我們設(shè)計(jì)的機(jī)器人的搭建過程。
1 概要介紹
其零部件有主控器、雙向編碼器、角度傳感器、探照器、超聲及光敏傳感器、行程及電源開關(guān)、齒輪、馬達(dá)、加強(qiáng)履帶、鏈輪、腿輪、萬向輪、蝸輪架、單雙向電氣泵、伺服器、信號分頻器、晶振、適配器、遙控器、自組螺絲、差速及齒條架、多種金屬件、扎帶、電池、充電裝置、長角鋼條、鋼絲、鋼片、螺絲、螺母、電源纜、電絲各種專用輪、軸承、鎖板等零部件組裝而成。
所用到的工具有大小粗細(xì)不等多個(gè)內(nèi)外六角L型扳手,一型扳手、鋼鋸、各種鉗子、電焊、工具剪及刀、垂子、改錐、平衡器、萬用表。
2 機(jī)器人搭建
步驟1底盤定位
方法:將平面鋼條與長角鋼因定在一起,像搭個(gè)板凳面一樣的固定個(gè)穩(wěn)固的四方型底座,得有加固設(shè)施和安裝四個(gè)雙方輪的框架。
步驟2組裝馬達(dá)
馬達(dá)外側(cè)裝軸承,必須將軸固定防止脫落,四個(gè)輪要套入四方軸中固定好,普通的機(jī)器人是四個(gè)輪子,我們搭建的機(jī)器人增加到六個(gè)輪子,穩(wěn)固性會(huì)更好,不會(huì)輕易摔倒。參賽時(shí)在四邊安裝萬向輪就更靈活了。
步驟3 抬升系統(tǒng)
將兩根方形架組裝到底座上,同時(shí)在底盤上裝兩組可申縮的背梁,在組裝兩根長角鋼到方形架上,這樣就構(gòu)成了夾球裝置的支撐臂,支撐臂的兩側(cè)兩組可申縮的抬升系統(tǒng)。
步驟4 抬升系統(tǒng)加固
在長角鋼與方形架、方形架與方形架之間在連接方形架,對抬升部分的支撐裝置進(jìn)行加固,同時(shí)還要注意抬升系統(tǒng)的靈活性,才不影響機(jī)器人運(yùn)行時(shí)的執(zhí)行速度及萬向的靈活性能。

VEX世界冠軍頒獎(jiǎng)現(xiàn)場(左三是作者本人) (圖1)
步驟5 抬升系統(tǒng)電機(jī)安裝
組裝抬升裝置的驅(qū)動(dòng)馬達(dá),馬達(dá)距離豎著的長角鋼頂端固定好,連接線要固定好并留有足夠的長度,防止障礙物纏繞機(jī)器人運(yùn)行。
步驟6軸承片安裝
將軸承片裝到抬升裝置的長角鋼的頂端,注意軸承的方向性及靈活性。如下圖2:
步驟7組裝齒輪
這里的四方軸可以用3"的四方軸,最好是用12"四方軸切割到剛好能連接到兩個(gè)馬達(dá)的位置,這樣可使兩個(gè)馬達(dá),動(dòng)力會(huì)加強(qiáng)更穩(wěn)固。
步驟8組裝抬升手臂
夾球裝置的支撐臂兩側(cè)組裝兩組可申縮的抬升手臂,組裝時(shí)要注意抬升的角度及范圍,同時(shí)用多種螺絲固定好,使得機(jī)器人運(yùn)行時(shí)達(dá)到手臂動(dòng)作穩(wěn)并準(zhǔn)的程度。
步驟9夾持裝置電機(jī)安裝
將兩根方形架和兩根短角鋼上裝上軸承片和馬達(dá),在組裝到一起,組成一個(gè)四方形,這樣構(gòu)成夾子的支撐部分及動(dòng)力部分,安裝的同時(shí)要注意電源線的固定角度和緊固性,防止機(jī)器人運(yùn)行時(shí)電機(jī)物理故障。
步驟10夾持裝置
組裝夾物的夾子,兩邊需相互對稱,要注意角度及夾持的穩(wěn)固性。如圖2:將夾子組裝到第5步的支撐架上,穿過齒輪的軸需用最長的四方軸來切割而成組裝,取出得分物裝置9將取得分物裝置組裝到9步中。
步驟11 控制器,接收器
將控制器和接收器組裝到機(jī)器人底座上,用螺絲固定好,同時(shí)加防護(hù)外架,防止運(yùn)行時(shí)摔脫。
步驟12 馬達(dá)連線、布線
將馬達(dá)連接到控制器上,這樣就完成整個(gè)機(jī)器人的組裝,如圖2
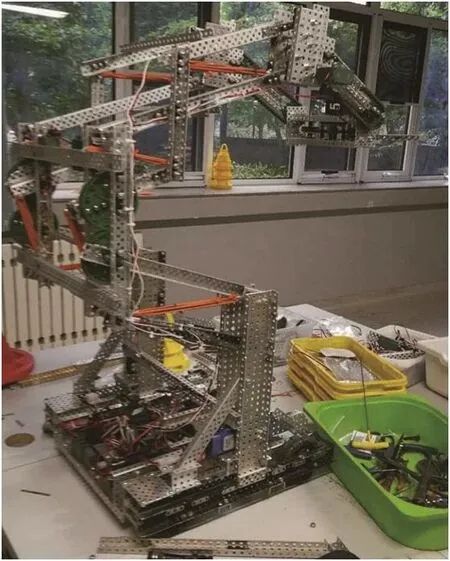
搭建中的參賽機(jī)器人(圖2)
機(jī)器人程序設(shè)計(jì)
程序“下載”:如何讓機(jī)器人懂得程序語言
將程序下載到控制器,如是晶體遙控則需確保連接好接收器并插好了晶體,如是WiFi 遙控則需確保主控與遙控對好碼,然后就可控制機(jī)器人了,如果發(fā)現(xiàn)某個(gè)或某些馬達(dá)的轉(zhuǎn)動(dòng)方向操作起來不習(xí)慣可點(diǎn)開遙控模塊,將反方向打鉤即可改變馬達(dá)的轉(zhuǎn)動(dòng)方向,再反復(fù)實(shí)驗(yàn)程序,修改程序。達(dá)到所設(shè)計(jì)程序與搭建完美結(jié)合。
傳感器:機(jī)器人的“五官”
機(jī)器人在實(shí)際比賽及運(yùn)用中,為實(shí)現(xiàn)智能化及自動(dòng)化控制,配置了各類傳感器對信息進(jìn)行采樣及處理,以助于機(jī)器人的自動(dòng)判斷。
觸碰傳感器:有效阻止抬升系統(tǒng)的過降、過升問題,使機(jī)器人的操控變得易上手,更加人性化。
光敏傳感器:通過灰度檢測比賽場地的白線,再程序中加入相應(yīng)的反映機(jī)制以及判斷條件,以矯正機(jī)器人的行進(jìn)路線,相當(dāng)于機(jī)器人的“眼睛”。使機(jī)器人有能力自主尋線行進(jìn),完成比賽任務(wù)。對機(jī)器人的穩(wěn)定性能有很大的幫助。
陀螺儀傳感器:在一水平面上檢測機(jī)器人偏離的角度,以此求得機(jī)器人轉(zhuǎn)過的一個(gè)定角,使機(jī)器人的轉(zhuǎn)向方向精準(zhǔn)程度提高,以安排更為復(fù)雜的程序路線。在對信息的采樣中,我們采用算法去除了異常值以及傳感器自身的偏差值,以提高陀螺儀的效用及準(zhǔn)確度。
控制算法設(shè)計(jì)
為了對機(jī)器人進(jìn)行精確控制,我們不但適配了合理的傳感器,同時(shí)采用多種控制算法相結(jié)合的策略,以達(dá)到準(zhǔn)度、速度的雙重標(biāo)準(zhǔn),提高機(jī)器人的競爭力。
多線程控制算法是我們采用的其中之一算法,用以解決不同馬達(dá)需同時(shí)接受控制的問題。我們的不同系統(tǒng)被置于不同的線程,在每一個(gè)相同時(shí)間片進(jìn)行控制。并允許我們自定義許多同步進(jìn)行的操作,即在抬升系統(tǒng)運(yùn)作的同時(shí),底盤馬達(dá)同時(shí)亦可運(yùn)作,以達(dá)到各個(gè)系統(tǒng)間的兼容。
一鍵控制被用于一鍵完成一系列操作。即類似于自定義宏操作,將一個(gè)系列的操作組合起來,使比賽過程中機(jī)器人表現(xiàn)的更為智能。如夾持系統(tǒng)即與抬升系統(tǒng)有一鍵的聯(lián)動(dòng)。令整個(gè)操作的體驗(yàn)更為人性化,體現(xiàn)程序設(shè)計(jì)的優(yōu)越性。
比例-積分-微分控制在工業(yè)上被廣泛應(yīng)用,我們亦采用該算法進(jìn)行專項(xiàng)控制。如抬升系統(tǒng)的位置維持,機(jī)器人前進(jìn)固定距離,夾持系統(tǒng)的牢靠程度等,均采用了該算法。
3 總結(jié)
我們搭建的機(jī)器人通過我們防摔裝置、手臂托物裝置和6輪的穩(wěn)與主機(jī)良好的銜接,具有穩(wěn)定性強(qiáng)的特點(diǎn)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32