基于擬合參數校正的室內位置推估方法
2018-07-16 11:54:06祝瑞輝甘興利
無線電工程 2018年8期
祝瑞輝,甘興利
(衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081)
0 引言
近年來,隨著各大室內場合位置服務需求迫切,室內定位技術成為研究的熱點。文獻[1-2]總結了國內外主流的室內定位技術及其定位原理,文獻[3]研究了基于WIFI和移動智能手機的室內定位方法,文獻[4-6]總結了基于射頻識別的室內定位技術,文獻[7]總結了基于超寬帶的室內定位方法,文獻[8-9]改進了基于到達信號強度和信號指紋的定位方法,為室內定位提供了思路,然而基于WiFi、射頻或者超寬帶的室內定位方法,需要預先在室內部署定位節點和設備,系統復雜且不具備自主定位能力。
MEMS慣性測量單元(Inertial Measurement Unit,IMU)因其低功耗、低成本、小型化和易集成的特點,成為室內行人導航的一種選擇[10]。使用IMU中的加速度計傳感器和陀螺儀傳感器分別獲取加速度信息和角速度信息,結合航跡推算算法實現位置估算。根據原理不同,可以分為根據慣性導航機制的連續積分定位和行人航位推算(PDR)定位[11],由于慣性連續積分定位對IMU硬件性能要求較高,實現困難且成本高,不適合應用在低成本、小型化的手持導航終端中。為此,文獻[12-13]對行人運動姿態進行分析和統計,提出了PDR算法,以降低移動距離的計算難度。
陀螺儀傳感器測向具有隨時間發散的特點,電子羅經通過感知周邊的磁場來測向,優點是沒有方位誤差累積,缺點是容易受周圍環境干擾。本文針對陀螺儀測向誤差累積和電子羅經受周圍磁場干擾而出現偏差的問題,提出一種基于擬合參數校正的電子羅經、陀螺儀和加速度計室內位置推估方法。通過預先設置電磁容忍閥值,監視周圍電磁環境,當小于閥值時,通過對先驗信息擬合計算磁場偏角,校正磁阻傳感器受電磁干擾引起偏差,進而使用電子羅經側向結果校正陀螺儀,消除累積誤差,當大于閥值時,磁阻傳感器失效,陀螺儀與加速度計組合測向。
1 行人航跡推算原理
室內航跡推算是一種相對定位技術,通過采集加速度傳感器、磁阻傳感器和角速度傳感器等信息,結合一定的航位推算算法,實時估算運動體的位置,參考文獻[14-15],包括預設步長、步長估計、方向檢測和位置估計4個步驟。基于加速度計和磁阻傳感器個人航跡工作流程如圖1所示。
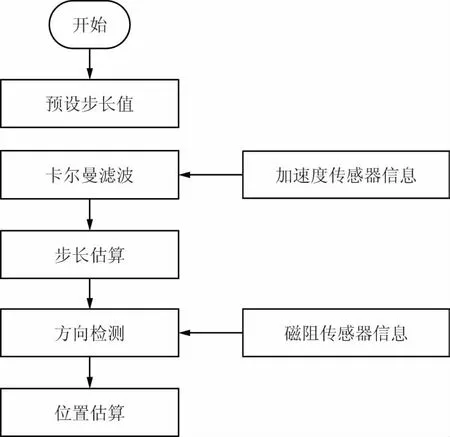
圖1 基于加速度計和磁阻傳感器個人航跡工作流程
使用加速度傳感器采集的加速度信息與預設步長值結合來檢測人員是否行走,檢測行人行走步數,結合步長,計算行人連續行走距離。利用先驗信息設置預設步長值作為步長值雖然簡單但會存在一定誤差,一種方法是當GPS位置數據可得時,這樣GPS數據可用來改正校準距離和方向的計算,以補償計算中的誤差;另外,它可以重新計算步長和電子羅經偏移,這樣可以減少一些連續的系統誤差。另一方面,文獻[16]采用具有穩定運算性能的線性模型,計算距離與真實距離之間的絕對誤差值作為評價指標,并做了多組試驗證明了該方法的可行性,步長校準模型為:
(1)


圖2 人員航跡推算原理
坐標軸的Nk、Ek分別表示k時刻地理坐標系的北向位置和南向位置。設某一時刻行人處于Pk-1(Ek-1,Nk-1)處,行走方向與E軸夾角為α,行人第k步移動距離d后到達Pk(Ek,Nk),假設行人在行走一步內的方向是不發生改變的,則Pk(Ek,Nk)和Pk-1(Ek-1,Nk-1)之間的關系為:
(2)
Pk-1(Ek-1,Nk-1)表示行人在行走到第k-1步前的位置坐標信息;,dk是行人第k步的步長,運動方向與E軸夾角為α。
2 基于數據擬合修正的磁羅盤測向方法
測向是行人航跡推算導航算法使用的關鍵[16],磁羅盤因硬件條件或位置放置等原因不可避免地存在誤差,但在基于陀螺儀姿態修正[17]和良好的電磁環境下采集數據,統計發現在某一區域范圍內偏差數據接近線性分布。因此,采用分段線性擬合的方法能夠極大地消除偏差,提高測向精度。
最小二乘線性數據擬合是處理弱非線性數據的常用方法[18],若數據分布統計接近線性,則可認為其擬合模型為y=kx+b。由于系統并非線性,故擬合后的數據與實測數據存在殘差,可表示為:
(3)
式中,(xi,yi)為實測點。
為了使用求極值方法,式(3)修改為:
(4)
顯然,式(4)是一個開口向上的曲線,SUM對k和b求導等于0,即可解算出k和b的值,求導有:
(5)
(6)
由式(5)和式(6)可得:
(7)
(8)
分段線性擬合是針對采樣數據在某一段時間內呈一定斜率的線性變化,而在整個周期內斜率是變化的情況下使用。
3 試驗結果與分析
當電子羅經可用時,首先使用電子羅經測向,并校正陀螺儀累計誤差,當電子羅經受周圍磁場干擾失效時,啟用陀螺儀測向。試驗場地選擇具有桌椅、柱子和鐵箱等較復雜的室內走廊場合。走廊呈東西走向,選擇最西點作為起點,沿走廊南側向正東方向穩步行走,加速度計和電子羅盤集成設備放置在后背腰處,當行走到走廊東頂點后折回,沿走廊北側回到起點處。試驗結果如下:
3.1 試驗1:數據線性擬合前行人行走測試
人員行走測量軌跡如圖3所示,當人員向穩步行走時,電子羅盤基于自身硬件和工藝以及周邊磁場干擾原因,在北向出現較大的偏差,并隨行走距離誤差不斷累積。
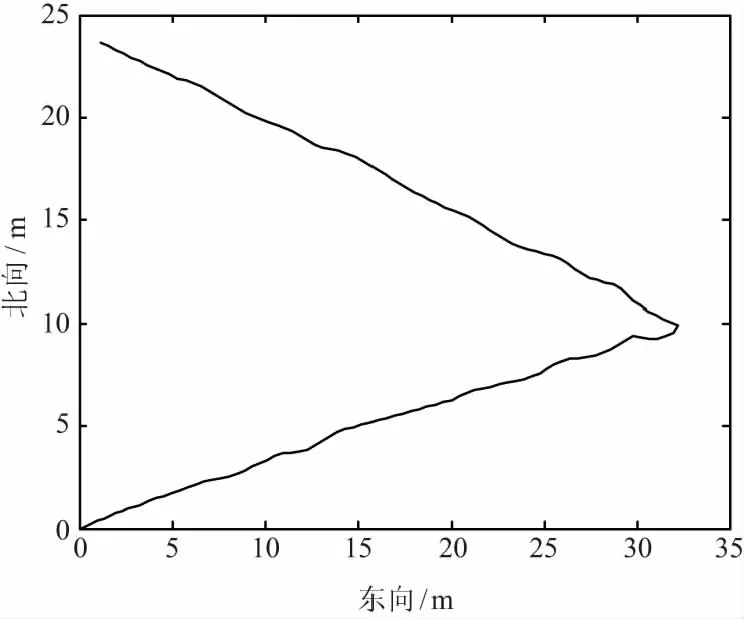
圖3 人員行走測量軌跡
北向誤差大致呈線性變化如圖4所示。由圖4可知,82步之前曲線斜率小于82步之后,即向東行走時北向誤差累計速度略小于向西行走,這與南北側磁場環境有關,也進一步說明分段擬合的必要性。
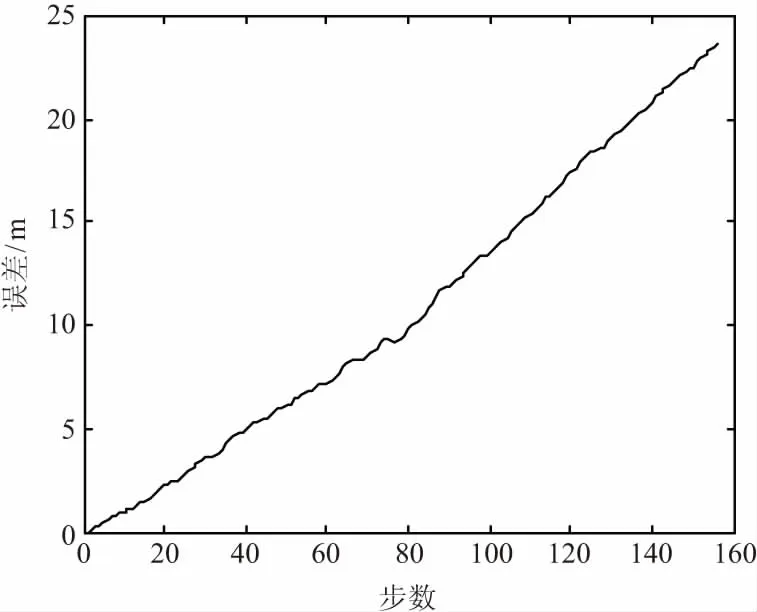
圖4 北向偏差變化曲線
3.2 試驗2:根據先驗信息線性擬合后行人行走測試
線性擬合后的人員行走軌跡如圖5所示,北向偏差變化曲線如圖6所示。

圖5 線性擬合后的人員行走軌跡
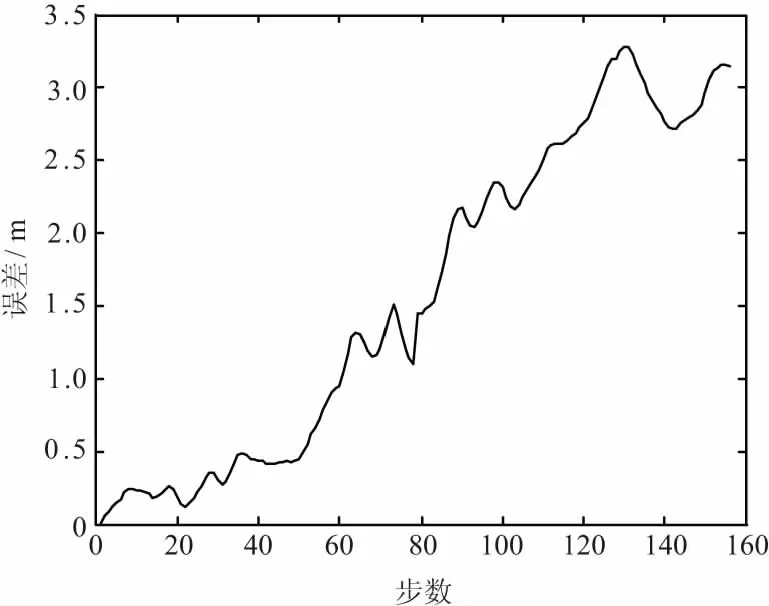
圖6 北向偏差變化曲線
從圖5和圖6可以看出,通過先驗信息,經線性擬合后,行走誤差顯著減小,精度提高。由于室內環境復雜,電子羅經受周圍電磁環境干擾,間歇失效,MEMS陀螺儀本身存在隨行走距離誤差累計、初始對準誤差等缺點,因子系統仍然存在誤差,并隨時間累積。
4 結束語
針對常規PDR系統中電子羅經因周邊環境磁場干擾而產生偏差的問題,引入了線性擬合方法,通過在室內區域行走收集電子羅經側向數據,與標定方向數據比較求得差值,再將差值經線性擬合方法擬合得到誤差修正參數,以彌補電子羅經周邊磁場環境干擾產生的誤差。試驗證明該方法具有一定的效果,雖然對于周邊磁場環境復雜情況,經擬合修正后仍然會存在誤差,但明顯消除大部分測向誤差。
