一種新型3-RPS并聯(lián)機(jī)構(gòu)的剛度特性分析
2018-07-21 07:35:40
制造業(yè)自動(dòng)化 2018年7期
(山東理工大學(xué) 機(jī)械工程學(xué)院,淄博 255049)
0 引言
并聯(lián)機(jī)構(gòu)由于并聯(lián)支鏈的存在,使其具有承載能力強(qiáng)、定位精度高等一系列優(yōu)點(diǎn)[1~3]。隨著研究人員對并聯(lián)機(jī)構(gòu)研究的深入,人們發(fā)現(xiàn)機(jī)構(gòu)靜剛度對機(jī)構(gòu)的定位精度等方面具有重要影響[4]。目前,針對并聯(lián)機(jī)構(gòu)靜剛度的分析方法有有限元法[5]、解析模型法[6~8]。欒玉亮等[5]基于有限元法對3-PPSR柔性并聯(lián)機(jī)器人的靜剛度進(jìn)行了分析。對于解析模型法,最早是由Gosselin[6]基于機(jī)構(gòu)速度雅克比矩陣提出的靜剛度解析模型。在此基礎(chǔ)上,Wang等[7]對一種滑塊式并聯(lián)加載機(jī)構(gòu)的靜剛度進(jìn)行了分析。趙福群等[8]提出了一種支鏈含有閉環(huán)單元的3-5RS并聯(lián)機(jī)構(gòu),基于速度雅可比矩陣建立了該機(jī)構(gòu)的靜剛度模型。
有限元法雖然方便快捷,但是無法建立機(jī)構(gòu)靜剛度與機(jī)構(gòu)尺寸參數(shù)、位姿參數(shù)之間的數(shù)學(xué)關(guān)系。對于以3自由度為代表的少自由度并聯(lián)機(jī)構(gòu),其速度雅可比矩陣并非6階方陣[9~11]。因此,基于速度雅可比矩陣所建立的靜剛度解析模型不能定量描述動(dòng)平臺非自由度方向上的位姿變形量。胡波等[12]基于虛設(shè)機(jī)構(gòu)法建立了傳統(tǒng)3-RPS并聯(lián)機(jī)構(gòu)的完整靜剛度模型,但對于其他同類型的少自由度并聯(lián)機(jī)構(gòu),文獻(xiàn)對如何虛設(shè)運(yùn)動(dòng)副并未給與詳細(xì)說明,該方法在實(shí)際應(yīng)用過程中也會受到一定限制。
對于轉(zhuǎn)動(dòng)副軸線平行布置的新型3-RPS并聯(lián)機(jī)構(gòu),本文從支鏈單元柔度矩陣角度出發(fā),所建立的機(jī)構(gòu)靜剛度模型能夠完整描述動(dòng)平臺在機(jī)構(gòu)自由度方向以及非自由度方向上的位姿變形量,更加符合動(dòng)平臺位姿變形的實(shí)際情況,尤其適用于少自由度并聯(lián)機(jī)構(gòu)的靜剛度分析。
1 3-RPS并聯(lián)機(jī)構(gòu)結(jié)構(gòu)描述
3-RPS并聯(lián)機(jī)構(gòu)由動(dòng)平臺、定平臺以及連接動(dòng)平臺和定平臺的三條支鏈組成,如圖1所示。
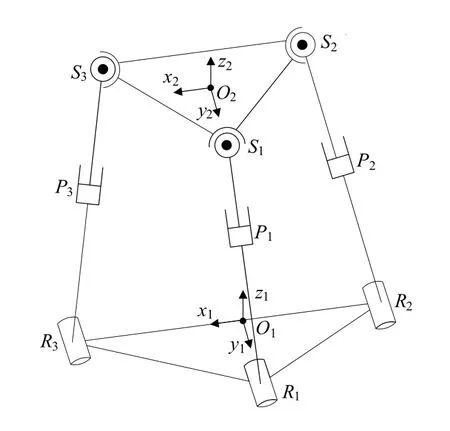
圖1 3-RPS并聯(lián)機(jī)構(gòu)簡圖
每條支鏈由下往上分別為轉(zhuǎn)動(dòng)副R、移動(dòng)副P和球鉸副S,動(dòng)力輸入為各支鏈移動(dòng)副。轉(zhuǎn)動(dòng)副按頂角為120°的等腰三角形布置(腰為R1R2和R1R3),球鉸副轉(zhuǎn)動(dòng)中心按等邊三角形布置,并且等邊三角形S1S2S3的高與等腰三角形R1R2R3底邊高相等。以定平臺底邊R2R3的中點(diǎn)O1為原點(diǎn)建立定坐標(biāo)系O1x1y1z1,以動(dòng)平臺幾何中心點(diǎn)O2為原點(diǎn)建立動(dòng)坐標(biāo)系O2x2y2z2。轉(zhuǎn)動(dòng)副軸線平行布置且與定坐標(biāo)系軸O1y1平行。因此,由機(jī)構(gòu)的結(jié)構(gòu)關(guān)系可知,動(dòng)平臺的自由度為沿坐標(biāo)系軸O1x1、O1z1的平移和繞坐標(biāo)系軸O2y2的轉(zhuǎn)動(dòng)。動(dòng)平臺的位姿可表示為[x,z,θ]T,其中x和z為動(dòng)平臺參考點(diǎn)O2在定坐標(biāo)系中的坐標(biāo)分量,θ為動(dòng)平臺外法線與定坐標(biāo)系軸O1x1的夾角。
2 單條支鏈末端變形量
在建立機(jī)構(gòu)靜剛度模型過程中,將定平臺和動(dòng)平臺視為剛體,僅考慮三條支鏈彈性變形,且忽略各運(yùn)動(dòng)副的間隙和摩擦對機(jī)構(gòu)靜剛度模型的影響。因?yàn)榍蜚q副S對構(gòu)件j的末端存在約束力,支鏈發(fā)生彈性變形,如圖2所示。構(gòu)件i和構(gòu)件j的變形屬于彈性極限范圍之內(nèi)的小變形,因此符合小變形疊加原理。在坐標(biāo)系Ojxjyjzj中,整條支鏈在點(diǎn)Oj處的變形量可由構(gòu)件i和構(gòu)件j的變形量疊加而成。
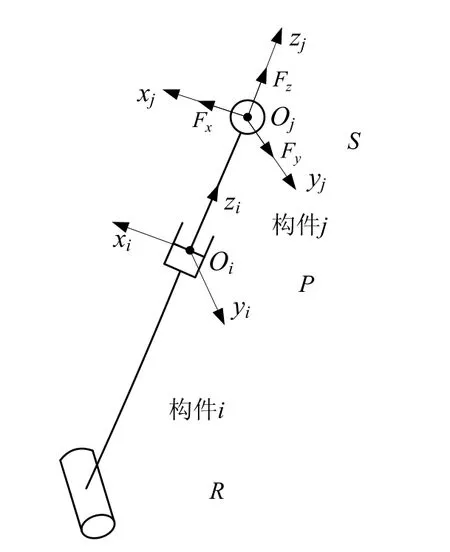
圖2 單條支鏈?zhǔn)芰ψ冃?/p>
2.1 構(gòu)件j的變形量
為了推導(dǎo)過程中表達(dá)的方便性,現(xiàn)對過程中出現(xiàn)的符號做出如下規(guī)定,為構(gòu)件B對構(gòu)件A在c點(diǎn)的作用力,為柔性構(gòu)件A上c點(diǎn)處的變形量,為剛性構(gòu)件B上c點(diǎn)處的位移量。
在坐標(biāo)系Ojxjyjzj中,設(shè)動(dòng)平臺(構(gòu)件k)在點(diǎn)Oj處對支鏈的作用力為因此把構(gòu)件i剛化時(shí),構(gòu)件j在點(diǎn)Oj處的變形量可由結(jié)構(gòu)力學(xué)中的單元柔度矩陣進(jìn)行定量分析,即:

式(1)中,Cj為構(gòu)件j的單元柔度矩陣,根據(jù)其局部坐標(biāo)系的建立情況可得:
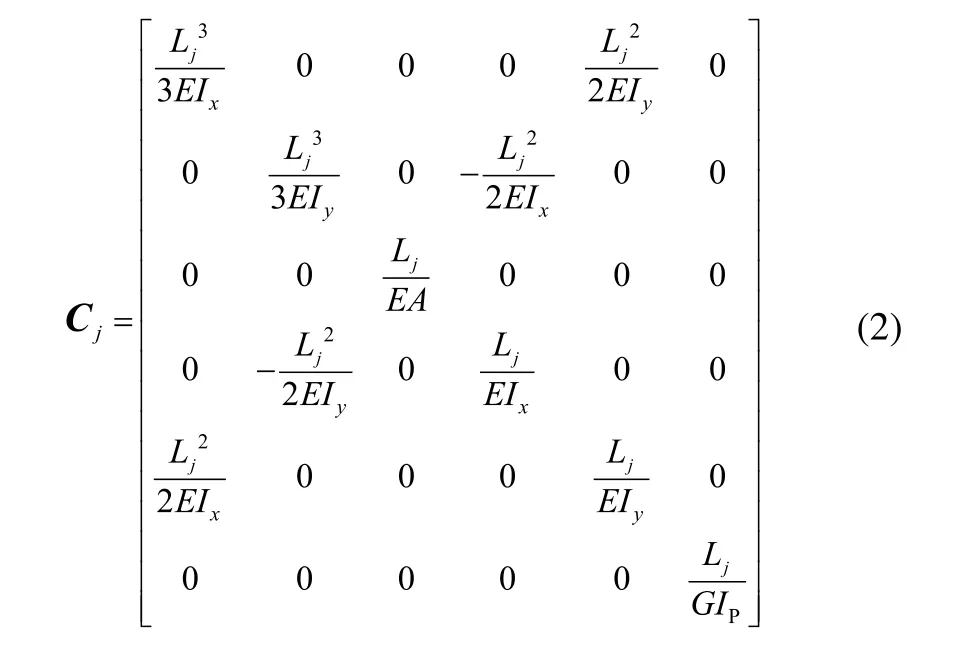
式(2)中,Lj為構(gòu)件j的長度,mm;E和G分別為構(gòu)件j的彈性模量和切變模量,GPa;Ix和Iy為構(gòu)件j繞其局部坐標(biāo)系Ojxjyjzj對應(yīng)坐標(biāo)軸的轉(zhuǎn)動(dòng)慣量,kg.mm2;IP為構(gòu)件j對其局部坐標(biāo)系坐標(biāo)原點(diǎn)Oj的極慣性矩,kg.mm2。
2.2 構(gòu)件i的變形量
在坐標(biāo)系Oixiyizi中,將構(gòu)件j視為剛體而構(gòu)件i為柔性體時(shí),構(gòu)件i在點(diǎn)Oi處的變形量為:

式(3)中,Ci為構(gòu)件i的單元柔度矩陣,其建立方法與式(2)同理。為求得力需要對構(gòu)件j進(jìn)行受力分析。
以構(gòu)件j為研究對象,在節(jié)點(diǎn)Oi處建立如下力平衡方程:

由式(4)可得:

由式(3)和式(5)得:

根據(jù)理論力學(xué)中力的平移定理,將構(gòu)件k在點(diǎn)Oj處對構(gòu)件j的作用力平移到點(diǎn)Oi處為:

力平移時(shí),在點(diǎn)Oi處所附加的力偶矩為:
由于點(diǎn)Oi是構(gòu)件i和構(gòu)件j的公共節(jié)點(diǎn),由式(6)和式(7)可得:

構(gòu)件i的彈性變形引起了構(gòu)件j的位移變化,但構(gòu)件j在點(diǎn)Oi處和點(diǎn)Oj處的位移變化量是不同的,根據(jù)理論力學(xué)中剛體上任意兩點(diǎn)的運(yùn)動(dòng)規(guī)律可得:

式(9)中,
將式(8)代入式(9)中可得:

2.3 單條支鏈末端變形量
在坐標(biāo)系Ojxjyjzj中,基于式(1)和式(10),根據(jù)小變形疊加原理可得單條支鏈的末端變形量為:

3 機(jī)構(gòu)整體剛度矩陣
對于單條支鏈,在坐標(biāo)系Ojxjyjzj中,由于點(diǎn)Oj是構(gòu)件j和構(gòu)件k(動(dòng)平臺)的公共節(jié)點(diǎn),則:


其中θ為軸O1x1和軸Ojxj的夾角,且在坐標(biāo)變換過程中從軸O1y1正向看逆時(shí)針方向?yàn)檎?/p>
在定坐標(biāo)系中,構(gòu)件k的位移可以由剛體上任意一點(diǎn)的位移進(jìn)行描述,且構(gòu)件k在點(diǎn)Oj處和點(diǎn)O2處的位移量存在如下關(guān)系:

式(14)中,
由式(11)~式(14)可得:

對于全部支鏈,根據(jù)式(15)可得:
由式(16)可得構(gòu)件k對各支鏈的作用力為:

根據(jù)理論力學(xué)中力的平移定理,將各支鏈在點(diǎn)Oj處對構(gòu)件k的反作用力由點(diǎn)Oj平移到構(gòu)件k的幾何中心點(diǎn)O2處:

式(18)中:

力的平移過程中,在點(diǎn)O2處所附加的力偶矩為:
當(dāng)機(jī)構(gòu)靜止時(shí),動(dòng)平臺受力平衡,由式(17)、式(18)可在構(gòu)件k的幾何中心點(diǎn)O2處建立如下力平衡方程:

其中Ffz為動(dòng)平臺所受工作載荷:

由式(19)可得:

其中K為機(jī)構(gòu)的靜剛度矩陣。

4 算例分析
機(jī)構(gòu)參數(shù)如下:構(gòu)件i和構(gòu)件j的材料均選用45號鋼,其彈性模量E=200GPa,切變模量G=80GPa。動(dòng)平臺邊長為300mm,定平臺底邊長為900mm,各支鏈轉(zhuǎn)動(dòng)副到對應(yīng)移動(dòng)副的距離為360mm。構(gòu)件i的橫截面積為2500mm2,轉(zhuǎn)動(dòng)慣量Ixi=50154.85kg.mm2,Iyi=50157.46 kg.mm2。構(gòu)件j的橫截面積為900mm2,對應(yīng)的轉(zhuǎn)動(dòng)慣量為Ixj=18476.39kg.mm2,Iyj=18476.39kg.mm2。設(shè)工作載荷為[100N,100N,100N,80N.m,80N.m,80N.m]T,任選動(dòng)平臺位姿[0mm,550mm,90°]T,則在定坐標(biāo)系O1x1y1z1中,動(dòng)平臺的理論位姿變形量和基于ANSYS的測量值如表1、表2所示。

表1 線變形理論值和ANSYS測量值對比
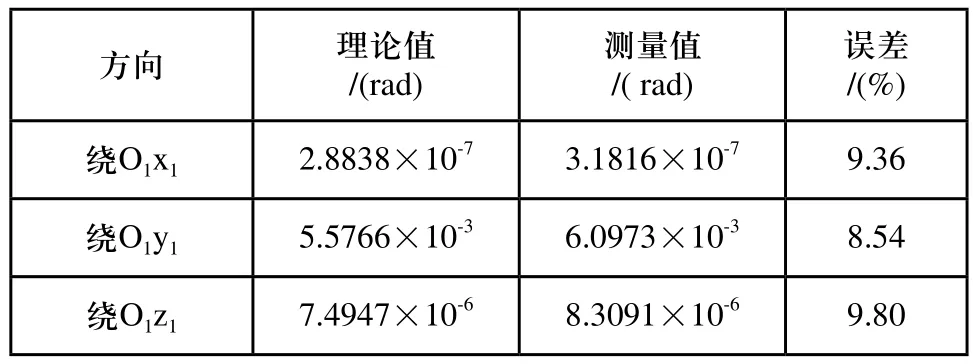
表2 角變形理論值和ANSYS測量值對比
由表1、表2可知,雖然機(jī)構(gòu)只有三個(gè)自由度,但動(dòng)平臺在機(jī)構(gòu)非自由度方向上也存在位姿變形。動(dòng)平臺參考點(diǎn)的線位移在沿軸O1y1的方向上最大,動(dòng)平臺的角位移在繞軸O1y1的方向上最大。動(dòng)平臺的位姿變形以線變形為主。
為分析機(jī)構(gòu)靜剛度在定姿態(tài)工作空間中的變化情況,令x的變化范圍為-50mm~50mm,z的變化范圍為500mm~600mm,θ=90°,該機(jī)構(gòu)的靜剛度特性曲面如圖3~圖8所示。
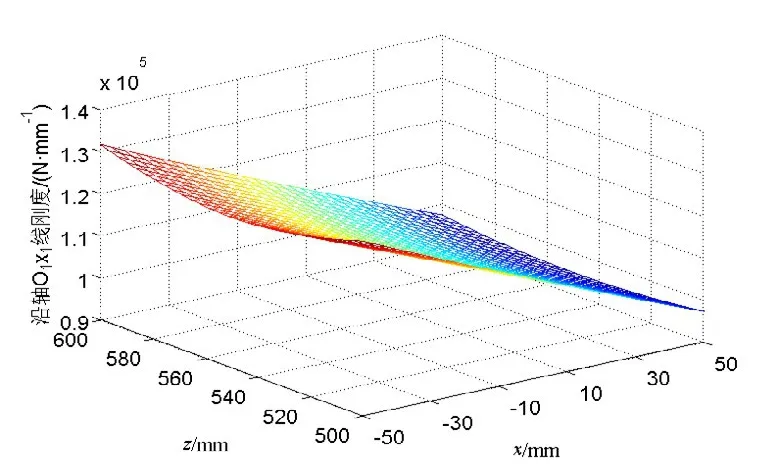
圖3 機(jī)構(gòu)沿軸O1x1線剛度
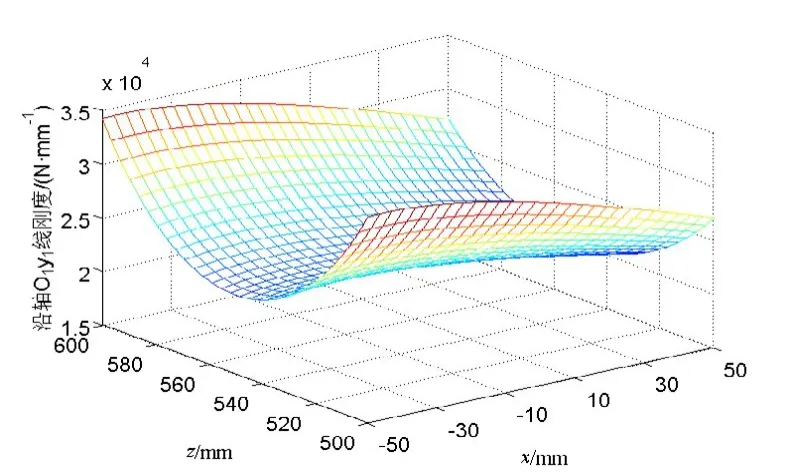
圖4 機(jī)構(gòu)沿軸O1y1線剛度

圖5 機(jī)構(gòu)沿軸O1z1線剛度
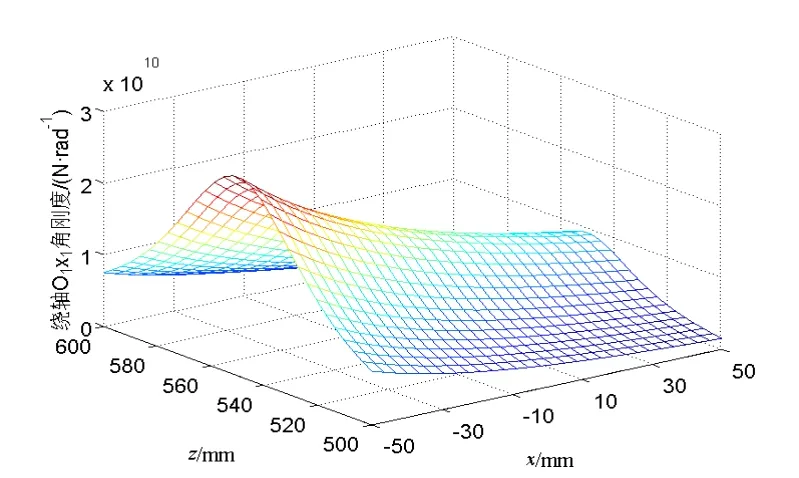
圖6 機(jī)構(gòu)繞軸O1x1角剛度
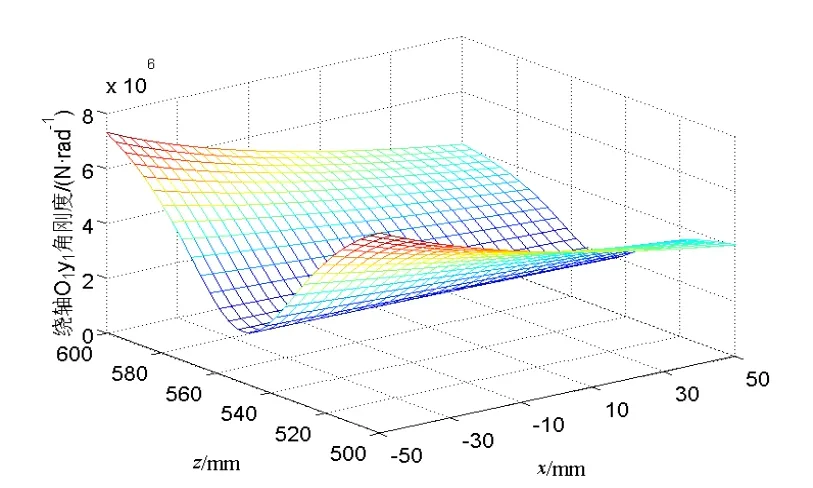
圖7 機(jī)構(gòu)繞軸O1y1角剛度

圖8 機(jī)構(gòu)繞軸O1z1角剛度
由圖3~圖8可知,機(jī)構(gòu)靜剛度隨動(dòng)平臺參考點(diǎn)x值的改變而平穩(wěn)變化,但是z值的改變使機(jī)構(gòu)沿軸O1y1和O1z1的線剛度、繞軸O1x1和O1y1的角剛度存在波動(dòng)。
5 結(jié)論
針對本文提出的新型3-RPS并聯(lián)機(jī)構(gòu),從單元柔度矩陣角度出發(fā),結(jié)合小變形疊加原理、剛體上任意兩點(diǎn)的運(yùn)動(dòng)規(guī)律以及力的平移定理,建立了該機(jī)構(gòu)的靜剛度模型。根據(jù)數(shù)值算例中動(dòng)平臺的理論位姿變形量和ANSYS的有限元測量值驗(yàn)證了該建模過程的正確性。
基于靜剛度模型繪制了機(jī)構(gòu)在定姿態(tài)工作空間中的靜剛度特性曲面,并給出了機(jī)構(gòu)靜剛度的變化規(guī)律。整個(gè)分析過程并未基于雅可比矩陣,能夠定量描述動(dòng)平臺在機(jī)構(gòu)自由度和非自由度方向的位姿變形量,對于其他少自由度并聯(lián)機(jī)構(gòu)的靜剛度建模分析同樣具有普遍適用性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03