太空發電站參數化有限元建模與設計平臺
2018-07-23 08:54:14,,
中國空間科學技術 2018年3期
關鍵詞:有限元
,,
中國空間技術研究院 錢學森空間技術實驗室,北京 100094
太空發電站(Solar Power Satellite,SPS),又稱空間太陽能電站,是一種在空間將太陽光轉化為電力、再通過無線能量傳輸的方式將其傳輸到地面的超大型發電系統。20世紀70年代,美國Glaser博士首次提出了太空發電站的設想[1]。進入新世紀,專家學者已經逐漸意識到,發展地面太陽能電站不能當作替代消耗性燃料主力電站的有效途徑[2],太空發電站將大大促進能源和航天技術的可持續發展。
目前,國際太空發電站技術的研究進展與趨勢主要為系統方案與關鍵技術同步進行[3-6]。近幾年,太空發電站的總體方案及分系統關鍵技術取得了較多的研究成果。在總體方案的設計上,侯欣賓等[7]提出了一種新的概念方案——多旋轉關節太空發電站,解決了傳統太空發電站方案中的極大功率導電旋轉關節技術難題,并給出總體構型和主要分系統初步方案設計結果。同時,研究人員在太陽能收集轉化技術[8],熱控[9]、電站在軌結構健康監測[10]、動力學與控制[11-14]等太空發電站關鍵技術領域也取得了較好的研究成果。
太空發電站尺寸及質量巨大,其剛柔耦合動力學特性用傳統衛星的動力學分析與控制方法往往難以準確描述。基于上述原因,國內外學者在太空發電站的動力學與控制領域開展了一系列的研究討論。文獻[11]利用絕對節點坐標方法研究繩系太空發電站在軌飛行的太陽能電池板動力響應,分析了繩長、平臺系統的質量、軌道高度對于梁中點撓度和軸向平均應變的影響。文獻[12]研究了在考慮地球扁率的引力場中,高階重力和力矩對太空發電站姿軌運動的影響,認為高階力對衛星軌道的影響較大而對衛星姿態運動影響則較小。
現今各國對太空發電站的研究仍處于方案設計與分析階段,在對太空發電站的動力學與控制研究時,由于其結構尺寸龐大,單元與節點眾多,應用常規的有限元手動建模方法必然需要反復操作,效率極低,特別是在需要反復參數迭代的初始設計階段。因此只能將其假設為剛體或剛柔耦合系統,這種近似簡化處理必然會導致建模偏差。如何高效地通過太空發電站設計平臺建立有限元模型,是太空發電站動力學與控制技術發展的關鍵環節。
參數化有限元建模是提高動力學設計分析效率的一種重要途徑,已在眾多工程技術領域取得了較好的效益。文獻[15]應用PCL語言開發了三角形機翼的參數化建模模塊,文獻[16]實現了以縱向和橫向構件的數量變化為基礎自動進行機翼結構有限元模型的構建及分析。但是以上所提方法主要應用于機械、航空等部件級結構,當航天器存在大量模塊化組裝結構時往往缺乏系統的建模方法,所以無法應用于太空發電站結構的參數化有限元建模。對此,文獻[17]對160 m邊長的五點連接太陽帆進行參數化有限元建模與后處理,計算得到了0.533 m的變形結果,與國外同級別的150 m邊長的五點連接太陽帆得到的帆面最大變形0.513 m結果一致[18],驗證了所采用的太陽帆有限元建模方法的準確性。因此,本文將上述太陽帆參數化有限元建模方法拓展應用到太空發電站的參數化有限元建模中,并根據太空發電站模塊化的特點進行了有效的建模改進,旨在提高建模方法的準確性和精度。
因此,為彌補參數化有限元建模在太空發電站領域的研究空白,提高其動力學建模效率,本文將探討太空發電站的參數化建模方法,結合有限元節點與編號規則的設置以及設計平臺的建立,并通過一具體實例證明本文所提方法的有效性,本文的最終目的旨在從一定程度上提高太空發電站動力學與控制分系統設計與分析的效率。
1 太空發電站及其有限元模型
1.1 太空發電站概述
目前,多個國家和組織已提出了幾十個太空發電站概念方案,大致可以分為非聚光和聚光式兩大類,其中非聚光式又可分為集中式和分布式。本文建立的太空發電站參數化有限元建模與設計平臺是基于如圖1所示的平臺式概念[9]。該概念由太陽電池陣、發射天線陣及導電旋轉關節組成。南北兩側各有一巨型太陽電池陣,其中:電池陣由“日”字形主桁架結構作為主承力結構,方形100 m邊長的薄膜電池陣模塊由次桁架支撐并與主桁架連接;天線陣為外接直徑1 km的正八邊形,其主桁架為八邊形-十字交叉結構,天線陣模塊及次桁架構型,與電池陣模塊及次桁架模塊的構型基本一致,具體如圖2所示。
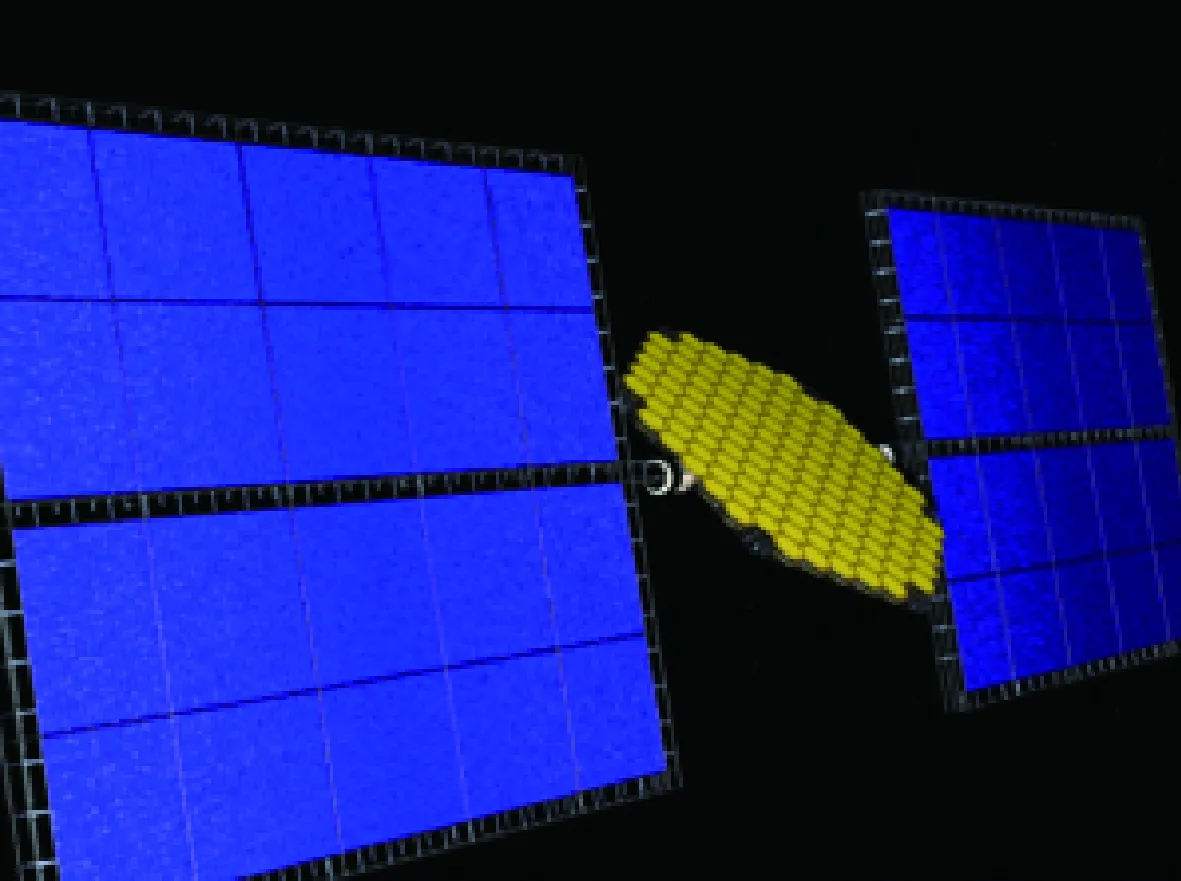
圖1 平臺式太空發電站概念Fig.1 Concept of planar SPS
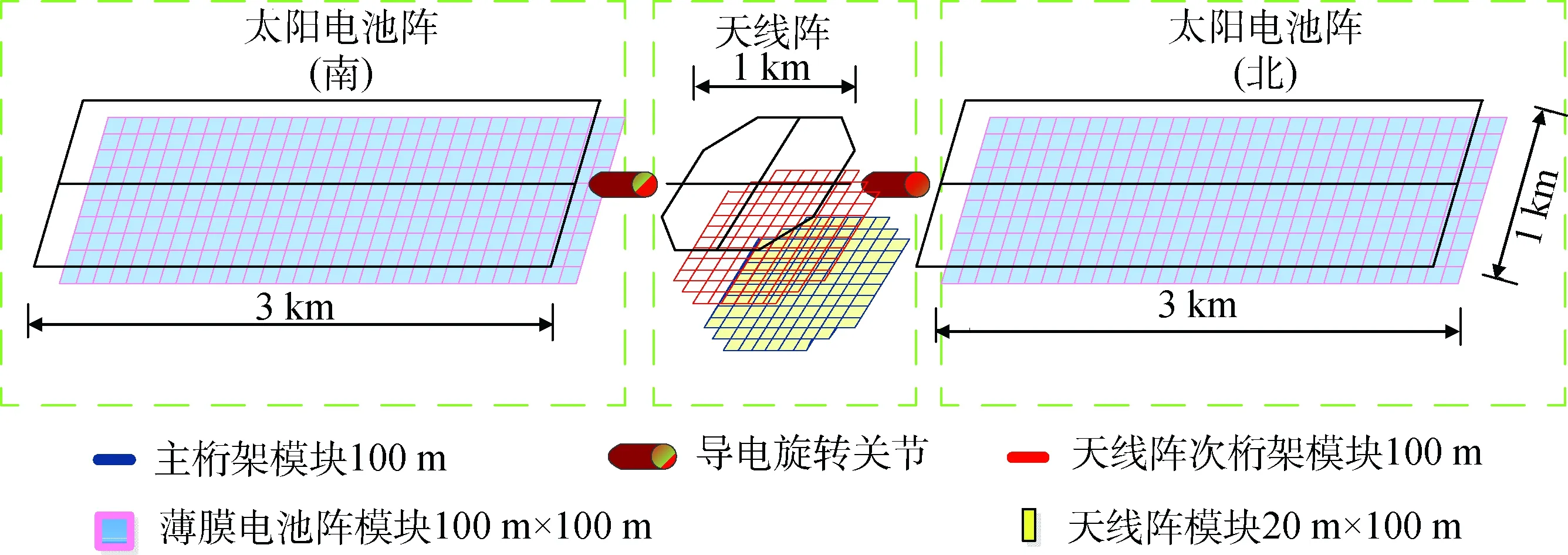
圖2 平臺式太空發電站組成示意Fig.2 Component scheme of planar SPS
1.2 有限元模型概述
太空發電站的力學特性將直接影響結構設計、動力學分析及控制,有限元方法作為力學特性計算的有效途徑,可以從多種角度提供太空發電站的靜力學、動力學等結論,給出整體結構的剛柔信息。
在太空發電站結構中,主桁架與次桁架的有限元模型為梁-桿組合結構,薄膜電池陣模塊為殼單元,天線陣模塊為板單元,附加無剛度的儀器設備為分布的質量單元。坐標軸按照如下規則設置:原點位于天線陣幾何中心,即平臺式電站的幾何形心;x軸方向指向北;z軸指向地心,y軸按右手法則規定。初步估算平臺式太空發電站約為萬噸量級,有限元模型的節點與單元數量約為百萬量級,由此可見,對于如此龐大的有限元模型,手動建模必然效率過低,因此,本文參數化建模及設計平臺的建立十分必要。
2 太空發電站參數化有限元建模
太空發電站仍處于設計階段,各種電站的概念、方案及設計層出不窮,為滿足設計者對結構動力學及控制領域的研究需求,同時減少設計階段有限元建模的重復工作量,太空發電站參數化有限元建模需實現參數化的實用性與可調性,因此需建立完善的節點與編號規則,以下將從太陽電池陣、天線陣與連接結構的建模分別介紹。
2.1 太陽電池陣節點編號定義
太陽電池陣主要由主桁架模塊、次桁架模塊及薄膜電池陣模塊構成。
2.1.1 主桁架模塊
節點編號格式:
(1)
對應的節點編號數值計算格式為
(2)

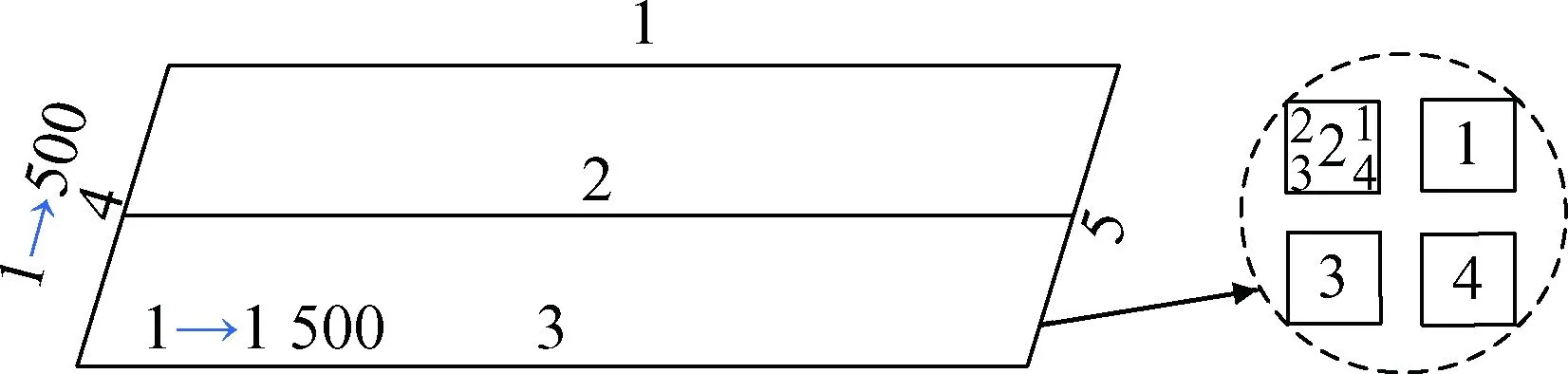
圖3 主桁架模塊編號示意Fig.3 Numbers of nodes on main truss module
2.1.2 次桁架模塊
節點編號格式:
(3)
對應的節點編號數值計算格式為:
(4)

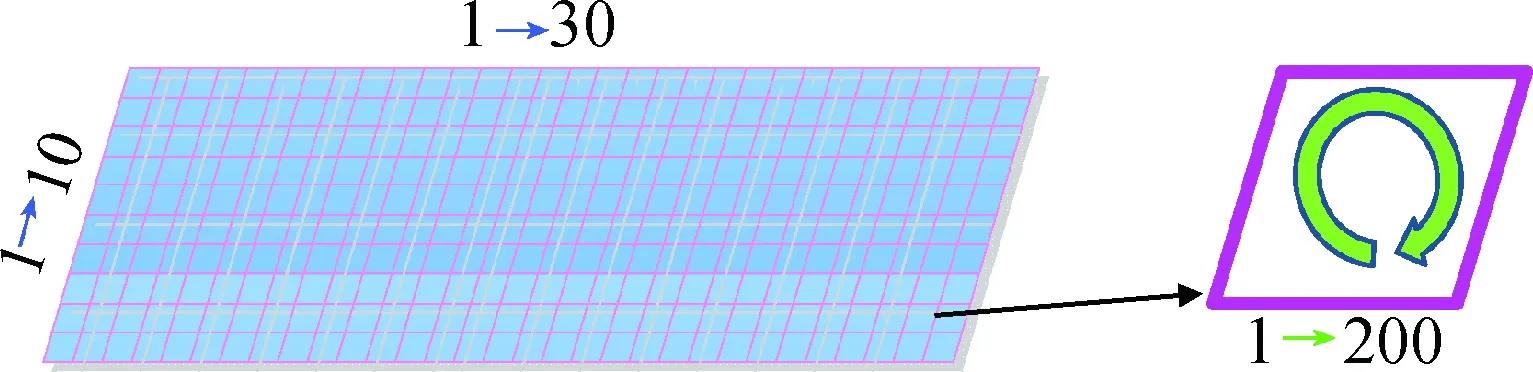
圖4 次桁架模塊編號示意Fig.4 Numbers of nodes on sub-truss module
2.1.3 薄膜電池陣模塊
由于薄膜電池陣模塊受到次桁架的拉伸預緊,故電池陣模塊的最外側與次桁架模塊共用節點,因此,只需生成電池陣模塊內部節點,節點編號格式:
(5)
對應的節點編號數值計算格式為:
(6)

2.2 天線陣節點編號定義
天線陣主要由主桁架模塊、次桁架模塊及天線陣模塊構成。天線陣參數化有限元建模與太陽電池陣基本一致,需要注意的是為防止節點編號干擾,需要在節點編號的最高位前再添加一位2。
2.2.1 主桁架模塊
節點編號格式:
(7)
對應的節點編號數值計算格式為
(8)
2.2.2 次桁架模塊
節點編號格式:
(9)
對應的節點編號數值計算格式為:
(10)
2.2.3 天線陣模塊
由于天線陣模塊受到次桁架的拉伸預緊,故電池陣的最外側與次桁架共用節點,因此,只需生成天線陣模塊內部節點,節點編號格式:
(11)
對應的節點編號數值計算格式為:
(12)

2.3 太陽電池陣與天線陣連接關節的節點編號定義
節點編號格式:
(13)
對應的節點編號數值計算格式為
(14)

2.4 單元編號定義
單元按照第2.1~2.3節生成的有限元節點按照一定的順序自動生成,根據節點編號規則,單元編號顯示格式為:
N=eNj
(15)
相應的數值計算格式為
N=e×108+Nj
(16)

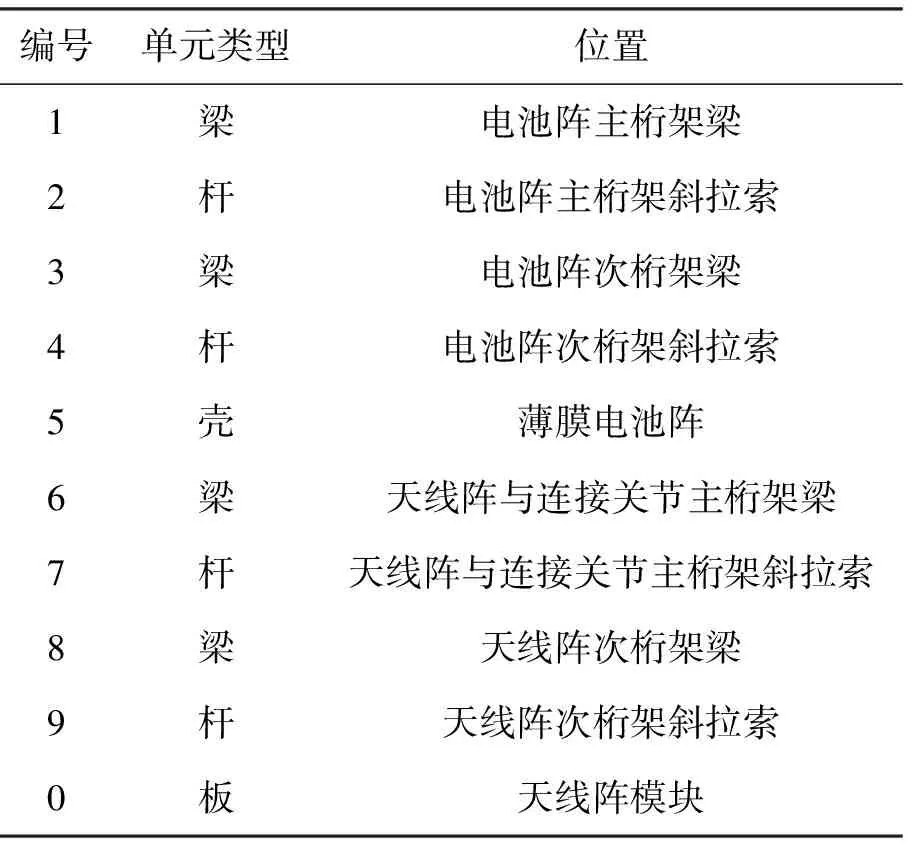
表1 單元編號定義
2.5 參數設置
在太空發電站的初步方案給定后,通過設置相關參數(見圖5),便可以建立電站的有限元模型,具體待設置參數包括幾何參數、材料參數及對接參數可參見文獻[6-7]。

圖5 太空發電站參數設置過程Fig.5 Parameter set process for SPS
2.5.1 幾何參數
主要包括尺寸及位置參數,其中尺寸參數又包括整體尺寸及單元尺寸。整體尺寸參數包括南北兩側電池陣的邊長及電池陣模塊的邊長,還包括天線陣的直徑及天線陣模塊的邊長;單元尺寸參數包括各部件的梁、索、殼及板單元的長度與厚度;位置參數主要為各部件之間的裝配關系及距離,通過建立有限元模型也可以發現前期設計環節中出現的幾何干涉問題。
2.5.2 材料參數
材料參數主要包括各部件的梁、桿、殼及板單元的彈性模量、泊松比,對于有可能出現的薄膜屈服情況,還應考慮薄膜的彈性極限及切線模量等參數。
2.5.3 對接參數
由于太空發電站尺寸巨大,在對其進行有限元建模的初始設計過程中,包括對接機構在內的細節模型由于建模規模原因無法詳細考慮。但另一方面,對接機構廣泛分布在電站結構中,其剛度和質量對電站整體力學性能影響較大,因此有必要采用簡化處理方法進行對接機構的剛度與質量建模。在本設計中,考慮通過改變對接位置的桁架剛度來模擬實際對接機構的剛度,通過添加附加質量來模擬實際對接機構的質量,這樣處理的最大優勢在于,既能簡化有限元模型,又能考慮對接機構的存在及其影響,實現高效率參數化建模。
3 太空發電站結構有限元設計平臺
基于ANSYS自帶的APDL參數化設計語言及UIDL用戶界面開發語言,并結合TCL/TK編寫界面,建立太空發電站設計平臺。
APDL(ANSYS Parametric Design Language)是一種參數化設計語言,它允許用戶通過指定程序給參數賦值,通過改變參數即可改變模型;UIDL語言可編寫ANSYS支持的、允許用戶根據需要設置并不復雜的菜單系統及簡單功能的對話框系統;TCL/TK可嵌入UIDL語言中,并可實現對APDL語言的調用,實現與ANSYS系統的交互訪問,并可定制復雜的對話框,從而彌補UIDL定制的標準對活框的不足。利用UIDL、TCL/TK及APDL在ANSYS平臺中進行太空發電站參數化有限元建模并搭建設計平臺的流程如圖5所示,具體過程如下:
1) 針對平臺式太空發電站基本構型,首先利用APDL語言建立電站有限元模型,實現其參數化仿真;
2) 根據太空發電站動力學仿真過程建立各具體功能模塊,借助ANSYS平臺的宏技術協調APDL參數化程序,獲得各功能的宏文件(.mac文件);
3) 針對不同的模塊功能,利用UIDL語言編制標準的功能菜單、交互界面及對話框,借助TCL/TK語言搭建非標準交互界面;
4) 功能菜單、交互界面及對話框中預留宏文件輸入參數接口,添加宏文件調用程序,對APDL參數化有限元建模程序進行界面封裝;
5) 利用UIDL和TCL/TK兩種語言提取宏文件執行結果并在對話框中顯示及后臺輸出。
因此,基于上述3種語言的特點,按照如圖5所示的流程建立太空發電站設計平臺。通過3種語言的編制以及調用,建立太空發電站設計平臺菜單。至此,太空發電站的參數化有限元與平臺搭建完畢,將通過一具體實例說明本文的有效性。
4 實例
基于上述提到的APDL、UIDL及TCL/TK的混合編程技術,結合本文提出的太空發電站參數化有限元建模方法及建立的設計平臺,按照第1.1節提出的平臺式太空發電站方案的構型進行電站的參數化建模與分析。電站初始設計時采用的材料屬性與幾何尺寸如表2所示,為簡單介紹,表2與表1中的各行一一對應。
圖6~圖8分別為利用本文提出的太空發電站參數化有限元建模方法及搭建的設計平臺,建立平臺式太空發電站各部分及整體的有限元模型。經統計,電站整體結構的節點總數為258萬,單元總數為444萬;另外,兩側電池陣的總質量為4 969 t,天線陣為3 435 t,合計為8 404 t。3個軸的轉動慣量依分別為:7.4×1011kg·m2,3.1×1013kg·m2與3.2×1013kg·m2。在剔除前六階剛體模態后,求解得到的固有頻率及模態振型分別如圖9與表3所示。不難發現,計算得到的太空發電站振動基頻為0.003 2 Hz,與初步估算的公里級航天器基頻處于0.001 Hz的量級相符。
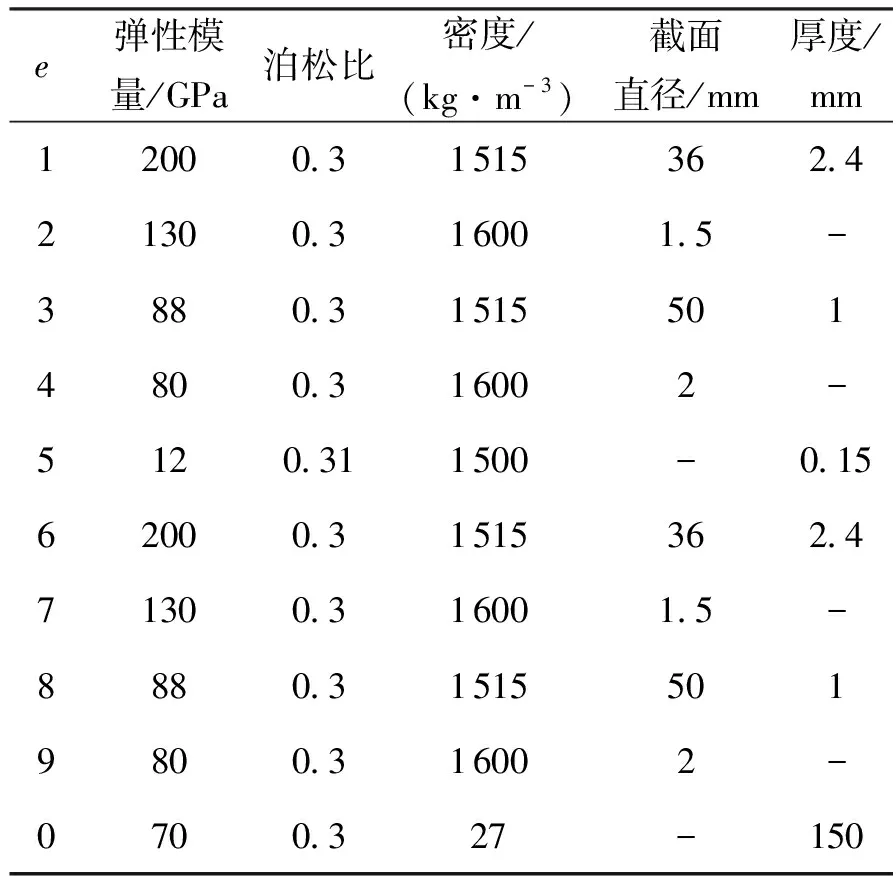
表2 材料屬性與幾何尺寸

圖6 主桁架有限元模型Fig.6 Finite element model of main structures

圖7 次桁架有限元模型Fig.7 Finite element model of sub-structures
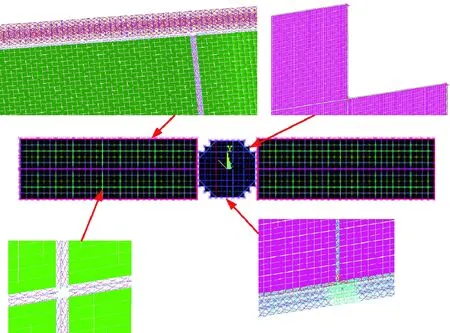
圖8 太空發電站有限元模型細節Fig.8 Detailed finite element model of SPS
整個建模過程只需要用戶在第3節所示設計平臺的人機交互界面輸入約30個參數,首次使用該平臺的設計人員從輸入參數到開始建模的前處理時間不會超過2 min,工作量極小,該平臺的建模時間約為6 h,而使用傳統有限元方法進行建模的時間將至少數日。由此可見,本文提出的參數化建模方法與設計平臺非常高效。
此外,太空發電站參數化有限元建模也通過對結構進行合理的離散及選用單元類型有效地降低了有限元建模誤差。首先,本文所建立的平臺式太空發電站有限元模型沒有曲線、曲面結構,故不存在邊界上以直線代曲線導致離散化模型與實際物體差異的網格離散誤差。其次,本文根據實際的電站構型,將桁架建立為桿、梁復合有限元單元,能夠合理承受拉壓彎扭多個自由度方向的載荷;將天線陣和電池陣分別建立為板和殼有限元單元,能較好地承受面外光壓與面內預緊載荷。這些結構的有限元模型均與實際結構的真實受力相符,因此單元位移函數誤差較小。
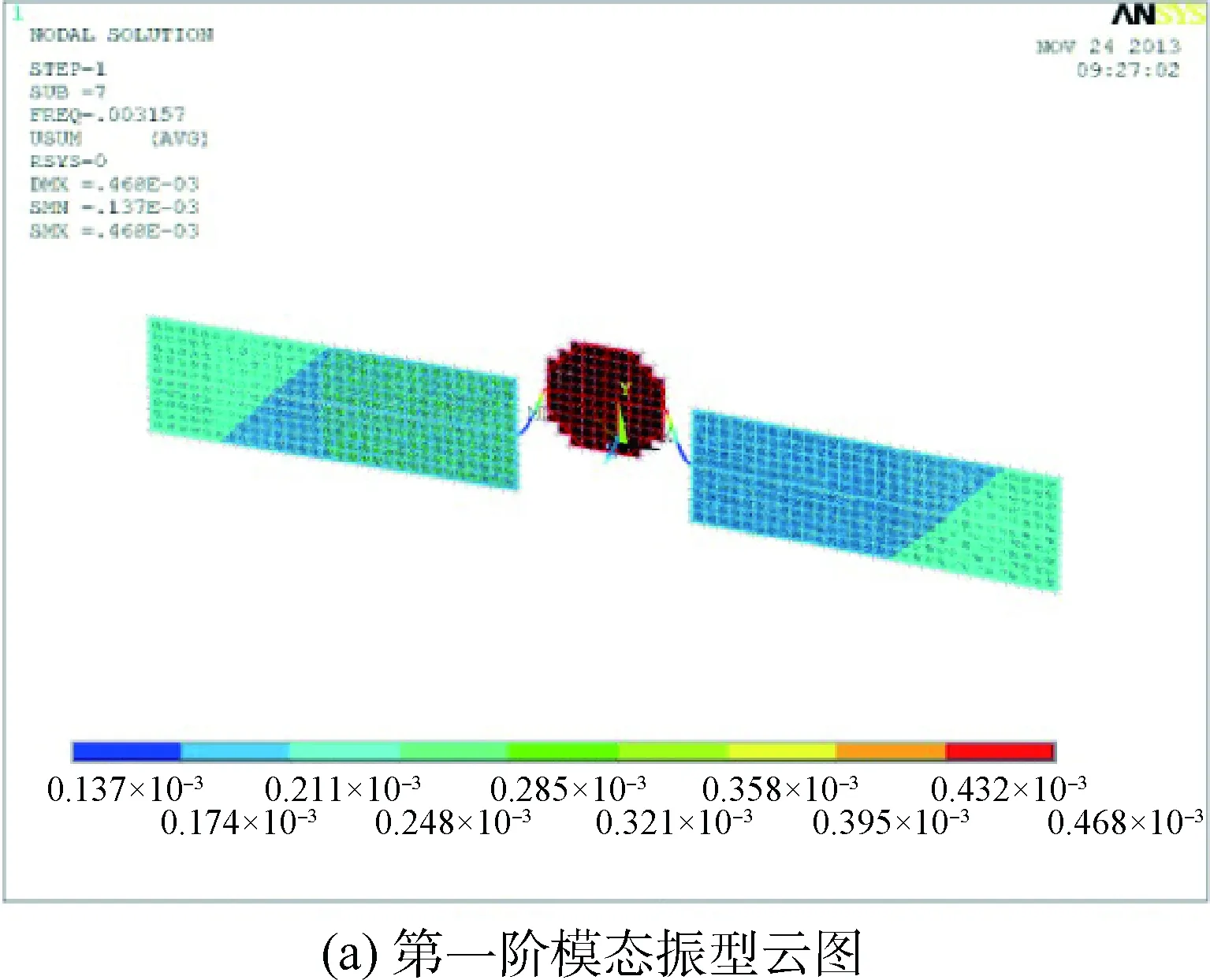
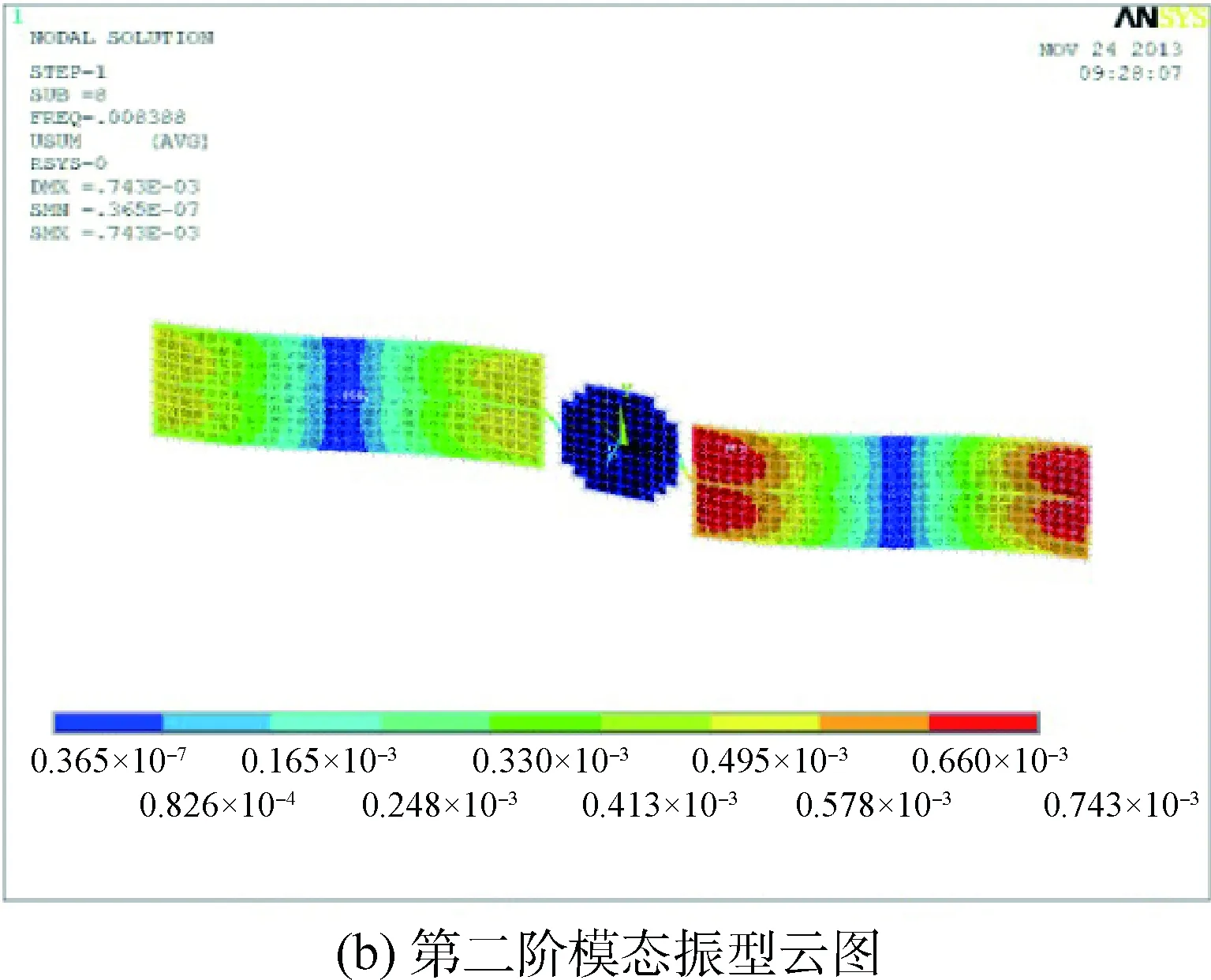
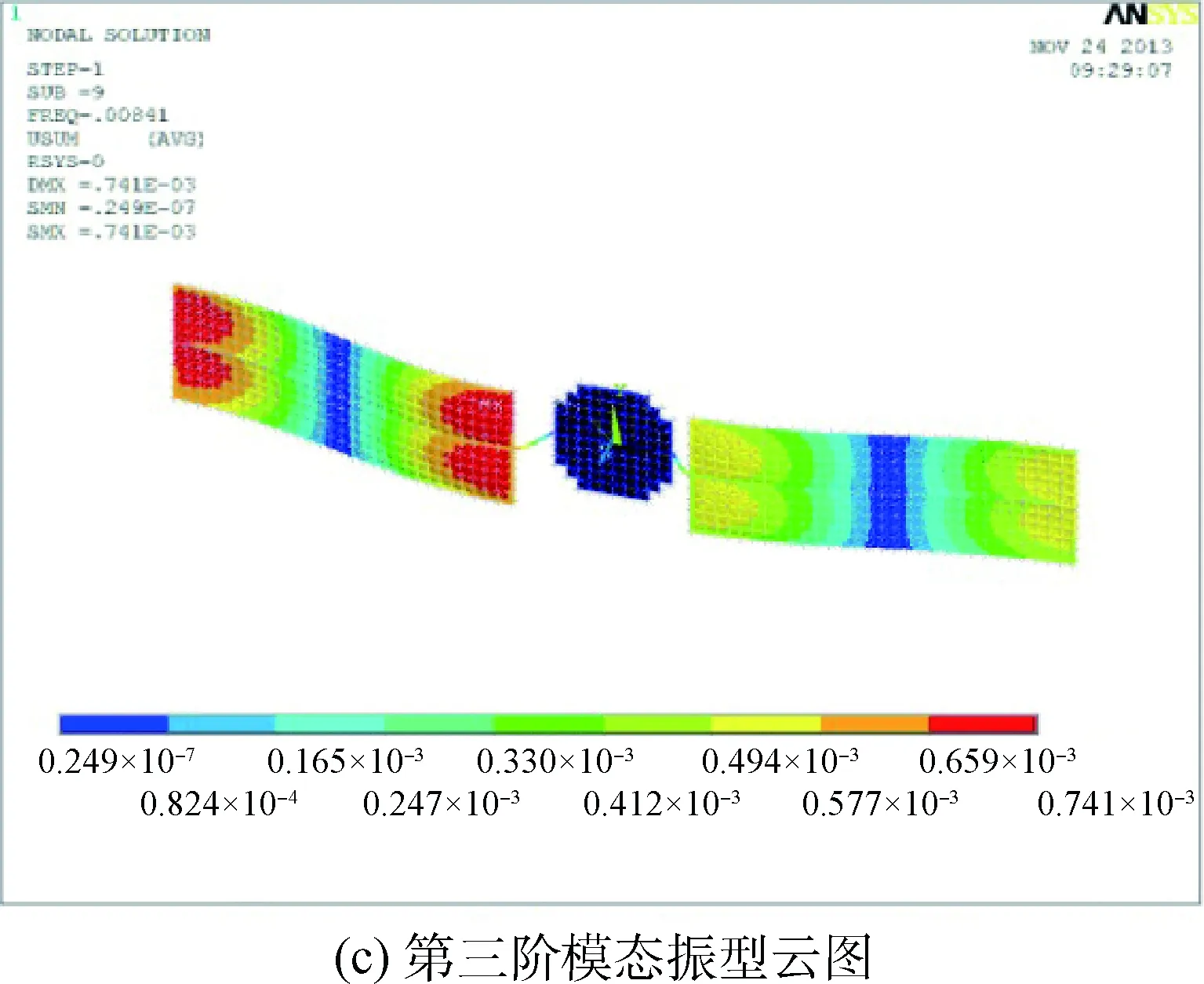
圖9 前五階模態振型云圖Fig.9 Cloud figures of the first five mode shapes
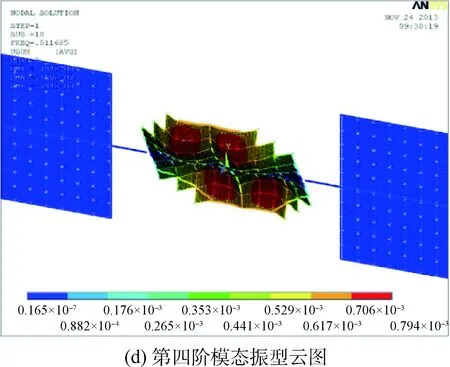
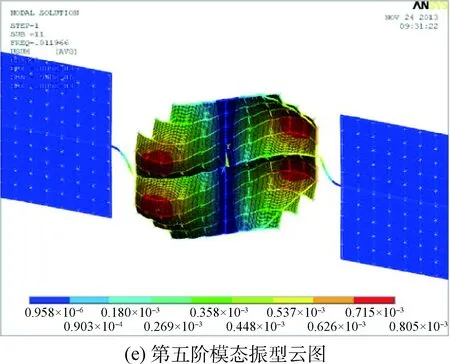
續圖9 前五階模態振型云圖Fig.9 Cloud figures of the first five mode shapes
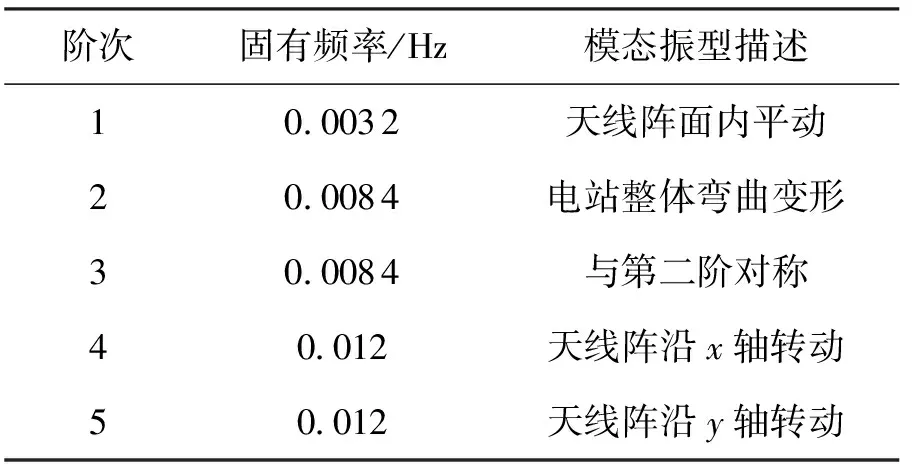
表3 前五階頻率與模態振型
5 結束語
本文以平臺式太空發電站為對象探索參數化有限元建模方法與設計平臺,概述電站構型及其有限元模型,定義易用的有限元節點與單元編號規則并給出了參數設置過程,借助混合編程技術,建立太空發電站參數化有限元模塊及設計平臺,通過一具體實例給出參數化建模過程及動力學特性結果。本文為太空發電站結構動力學分析與控制研究奠定了基礎,形成具有借鑒意義的結論如下:
1)按照太空發電站各部件的組裝關系,定義了簡單易懂的有限元節點與單元編號規則,并給出了參數設置過程。
2)借助混合編程技術建立的太空發電站參數化有限元模塊及設計平臺,可以使電站設計人員較為方便地實現有限元快速建模。
3)通過太空發電站參數化有限元建模與設計平臺可方便獲得節點、單元、質量、慣量、變形及模態等太空發電站動力學特性基本參數。
4)本文提出的針對平臺式太空發電站的參數化有限元建模方法亦可拓展為非聚光式太空發電站概念,且電池陣與天線陣為周邊桁架式構型的動力學建模。
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18