平臺導引頭隔離度對制導系統Lyapunov穩定性的影響
2018-07-27 03:09:48陳開偉夏群利
系統工程與電子技術 2018年8期
陳開偉, 杜 肖, 李 佳, 夏群利
(1. 北京理工大學宇航學院, 北京 100081; 2. 中國運載火箭技術研究院, 北京 100076;
3. 北京電子工程總體研究所, 北京 100854)
0 引 言
平臺導引頭的穩定平臺可使導引頭很好地隔離彈體擾動,但是導引頭內部導線拉扯及各部件摩擦等因素會使這種隔離并不完全,從而導致彈體擾動耦合進導引頭,引起隔離度問題。導引頭隔離度會在導彈制導控制系統中形成一個寄生回路,稱為隔離度寄生回路,該回路會對制導系統的穩定性能產生較大的影響[1-2]。
目前國內外學者關于導引頭寄生回路和制導系統穩定性的研究,主要基于“凍結時間”假設,將制導系統化為時不變系統并進行穩定性分析,而很少基于時變系統理論研究隔離度寄生回路對制導穩定性的影響。文獻[3-4]假設制導系統是慢時變系統,對天線罩誤差引起的隔離度寄生回路問題進行了研究。文獻[5-11]分別針對平臺導引頭、半捷聯導引頭、相控陣導引頭隔離度寄生回路特性及其對制導系統的影響進行了研究,并均采用Routh判據近似判定系統的穩定性。但是當彈目距離較短或制導動力學較快時,慢時變假設不再成立,應用Routh判據分析穩定性會帶來較大誤差。文獻[12]提出了比例導引有限時間穩定的思想,文獻[13]利用該思想對時變制導系統穩定性進行了分析,但遺憾的是在穩定邊界求解過程中依然使用了基于無限時間的理論,而實際的制導系統均定義在有限時間區間上。文獻[14]研究了基于無源性理論分析非線性時變系統穩定性的方法,文獻[15]利用無源性方法分析了全捷聯導引頭隔離度對制導系統穩定性的影響,為本文的研究提供了思路。
由于導引頭穩定回路帶寬很寬,工程上認為導引頭輸出的視線角速度既可以從穩定回路指令處提取也可以從角速度陀螺處提取[16],同時引起平臺導引頭隔離度(gimbaled seeker disturbance rejection rate,GSDRR)問題具有不同的機理,本文首先基于平臺導引頭對不同制導信號提取點及不同干擾力矩引起的導引頭隔離度傳遞函數(disturbance rejection rate transfer function, DRRTF)進行建模,并構建了包含隔離度寄生回路的比例導引制導系統模型。給出了分析時變制導系統Lyapunov穩定性的無源性方法,研究了比例導引制導系統一致漸進穩定性的判定條件,并通過仿真分析了不同DRRTF對制導系統穩定性的影響。最后基于制導系統穩定條件,給出了一種隔離度幅值指標計算方法。本文的研究結果可為制導控制系統的總體設計、GSDRR指標約束提供理論依據。
1 問題建模
1.1 隔離度傳遞函數模型

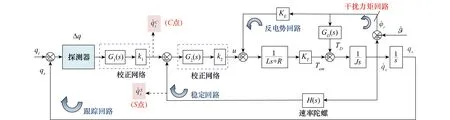
圖1 平臺導引頭控制回路模型Fig.1 Control loop model of gimbaled seeker
由圖1可知,GSCL模型主要包括穩定回路、跟蹤回路、干擾力矩回路、反電勢回路。干擾力矩回路是由導引頭轉動過程中各種導線的拉扯及轉動連接處的動靜摩擦等引起的,在圖1中將各種干擾力矩等效為傳遞函數GD(s)。干擾力矩的產生將會使彈體的運動耦合進導引頭運動中,降低導引頭的控制精度,是引起GSDRR問題的主要因素,主要包括彈簧力矩和阻尼力矩兩部分。真實的平臺導引頭干擾力矩為非線性模型,通常可用簡化的模型分析干擾力矩對導引頭隔離度及輸出精度的影響,其形式為
(1)
式中,Kn為彈簧力矩系數;Kω為阻尼力矩系數。
定義DRRTF傳遞函數為
(2)

由于在導引頭常用工作頻率范圍內(小于5 Hz),探測器延時和校正網路對DRRTF特性的影響是在小范圍內波動的,并不能從本質上改變其幅相基本特性,另外一般情況下反電動勢非常小,對導引頭控制精度影響不大。因此為了更直觀地體現DRRTF對制導控制系統的影響,可對GSCL模型進行等效簡化,忽略探測器延時、校正網絡、反電動勢、高頻動力學及小量的影響,取G1(s)=1、G2(s)=1、H(s)=1、R≈1、L≈0、穩定回路等效增益K2=G2k2KT/J、跟蹤回路等效增益K1=G1k1,可得GSCL簡化模型如圖2所示。
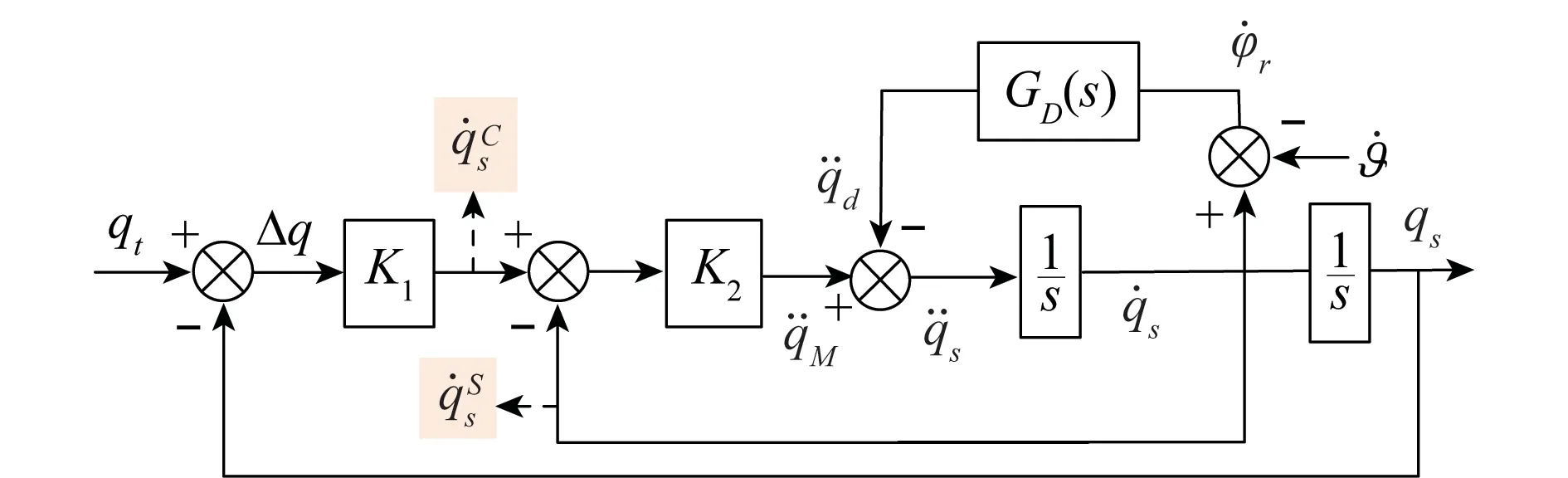
圖2 控制回路簡化模型Fig.2 Simplified model of control loop
由圖2可得,當干擾力矩為彈簧力矩時(即GD(s)=Kn/s),從S點和C點提取制導信號時的DRRTF分別為
(3)
(4)
當干擾力矩為阻尼力矩時(即GD(s)=Kω),從S點和C點提取制導信號時的DRRTF分別為
(5)
(6)
當忽略延時環節及校正網絡時有K1K2?Kn,忽略高頻動力學,令導引頭等效時間常數為Ts,則導引頭ITR可根據導引頭控制系統特性進一步簡化,如表1所示。
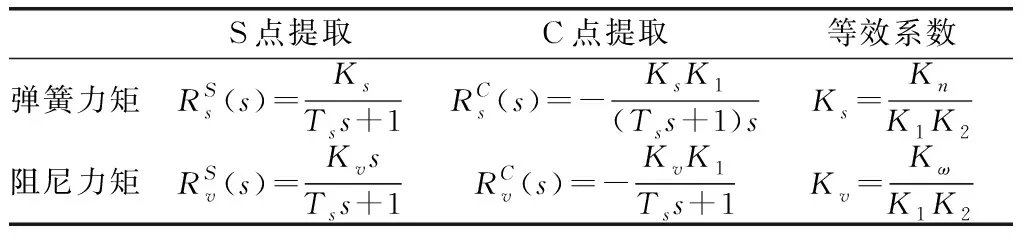
表1 一階ITR
由表1可知,不同的干擾力矩和視線角速度提取點,ITR不同。從C點提取制導信號時,傳遞函數穩態增益前均有一個負號,在后續分析隔離度寄生回路時,ITR位于反饋通道,故而可形成負反饋,而從S點提取制導信號時可形成隔離度寄生回路的正反饋。由上述分析可知,導引頭隔離度并不能簡單認為是某個頻率點處的恒定值,隔離度的頻率特性與導引頭控制系統的頻率特性密切相關,同時不同視線角速度提取點會引起寄生回路正負反饋情況不同,因此分析隔離度寄生回路對制導系統的影響時必須考慮導引頭ITR特性。
1.2 制導系統模型
圖3給出了包含隔離度寄生回路的比例導引制導系統模型。取制導濾波器為一階模型,駕駛儀為三階模型,導引頭動力學為一階模型,其時間常數為Ts=Tg/5。
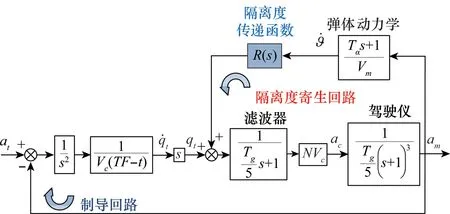
圖3 制導系統模型Fig.3 Guidance system model
圖3中,at為目標加速度;am為彈體加速度;TF-t為剩余飛行時間;Tg為末制導時間常數;Tα為攻角時間常數;Vm為導彈飛行速度;Vc為彈目相對速度;N為有效導航比。

圖4 無量綱制導系統模型Fig.4 Normalized guidance system model
2 制導系統的Lyapunov穩定性
2.1 制導系統的一致漸進穩定性
如圖4所示的制導系統為線性時變系統,本文采用Lyapunov理論分析系統平衡點的穩定性。研究Lyapunov穩定性時通常考慮輸入為零的情況,令圖4中參考輸入at=0,設制導系統為
(7)
如果
f(t,0)=0,?t≥0
(8)
則原點是t=0時式(7)的平衡點。定義系統的平衡點x=0是:
(1) 一致穩定的,如果對于每個ε>0,存在δ=δ(ε,t0)>0與t0無關,且滿足
‖x(t0)‖<δ?‖x(t)‖<ε,?t≥t0≥0
(9)
(2) 一致漸進穩定的,如果它是一致穩定的,且存在獨立于t0的正常數c,滿足對于所有‖x(t0)‖
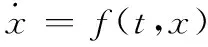
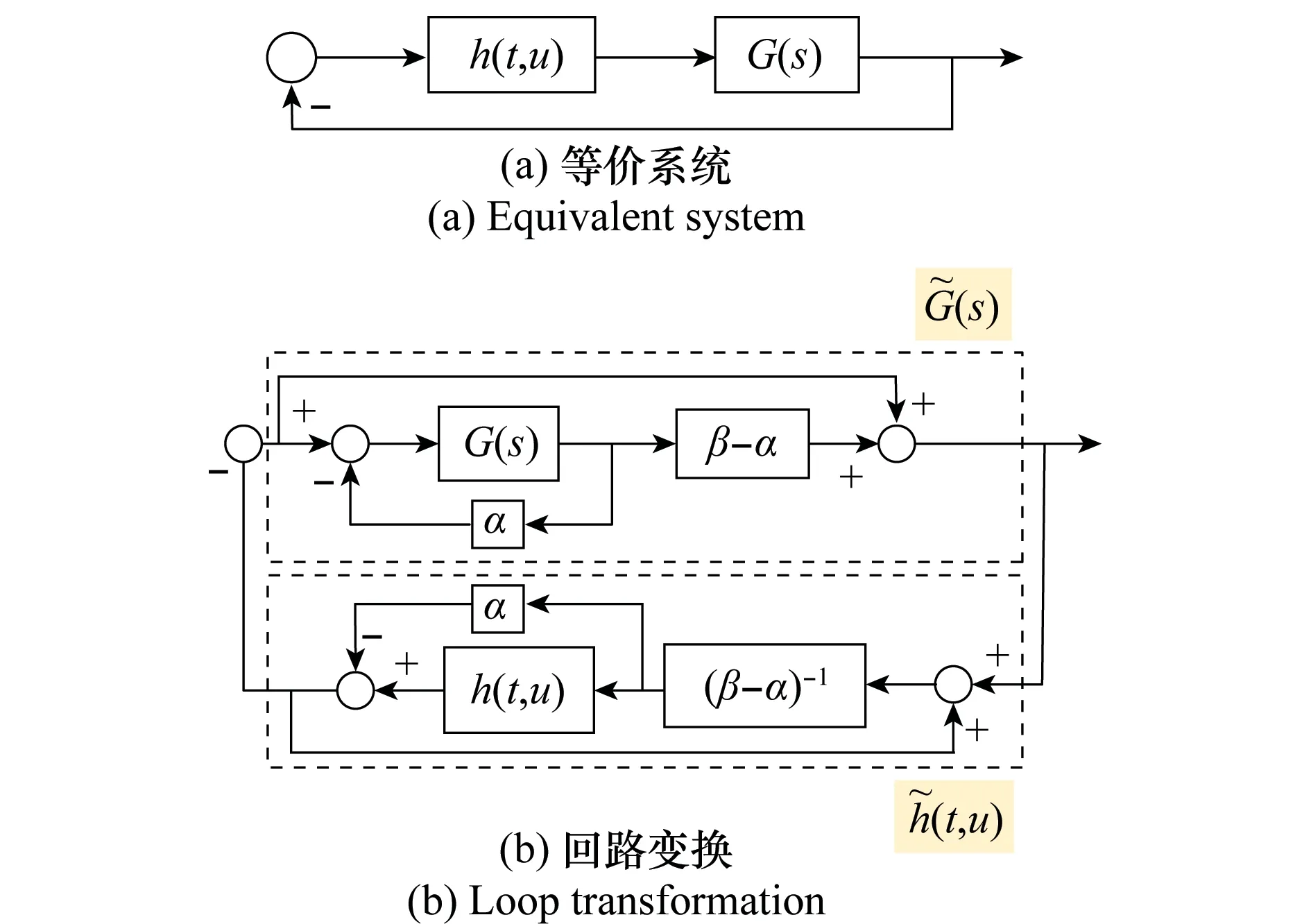
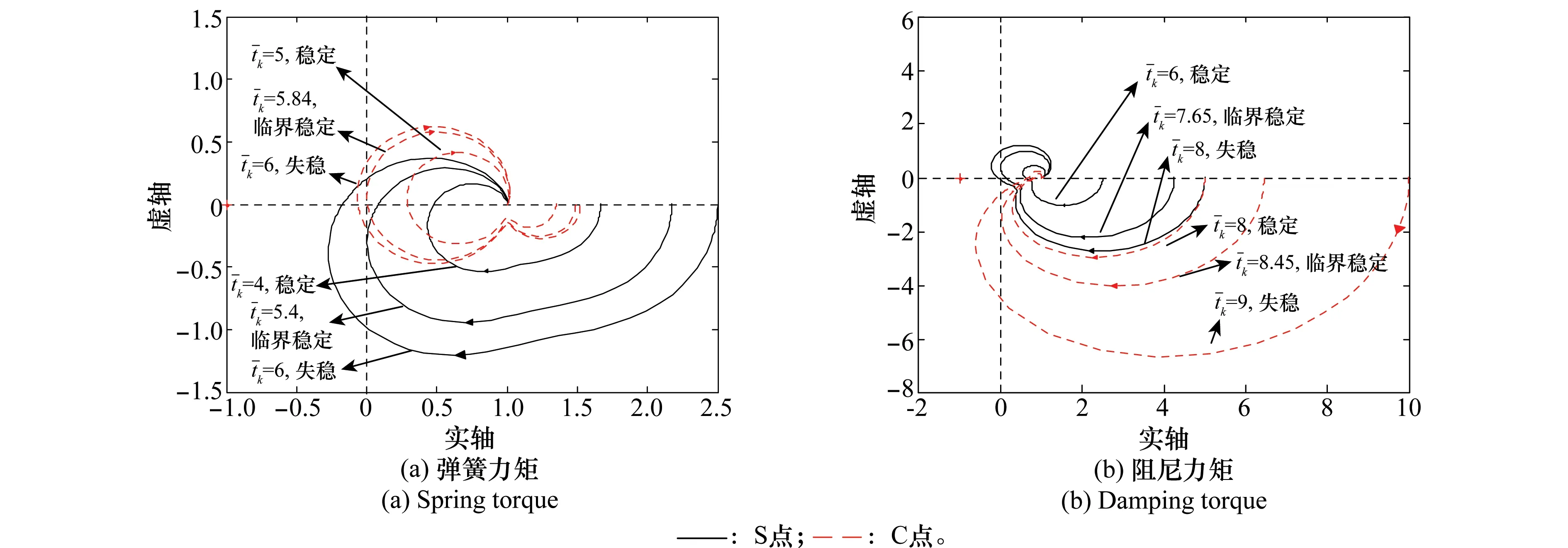
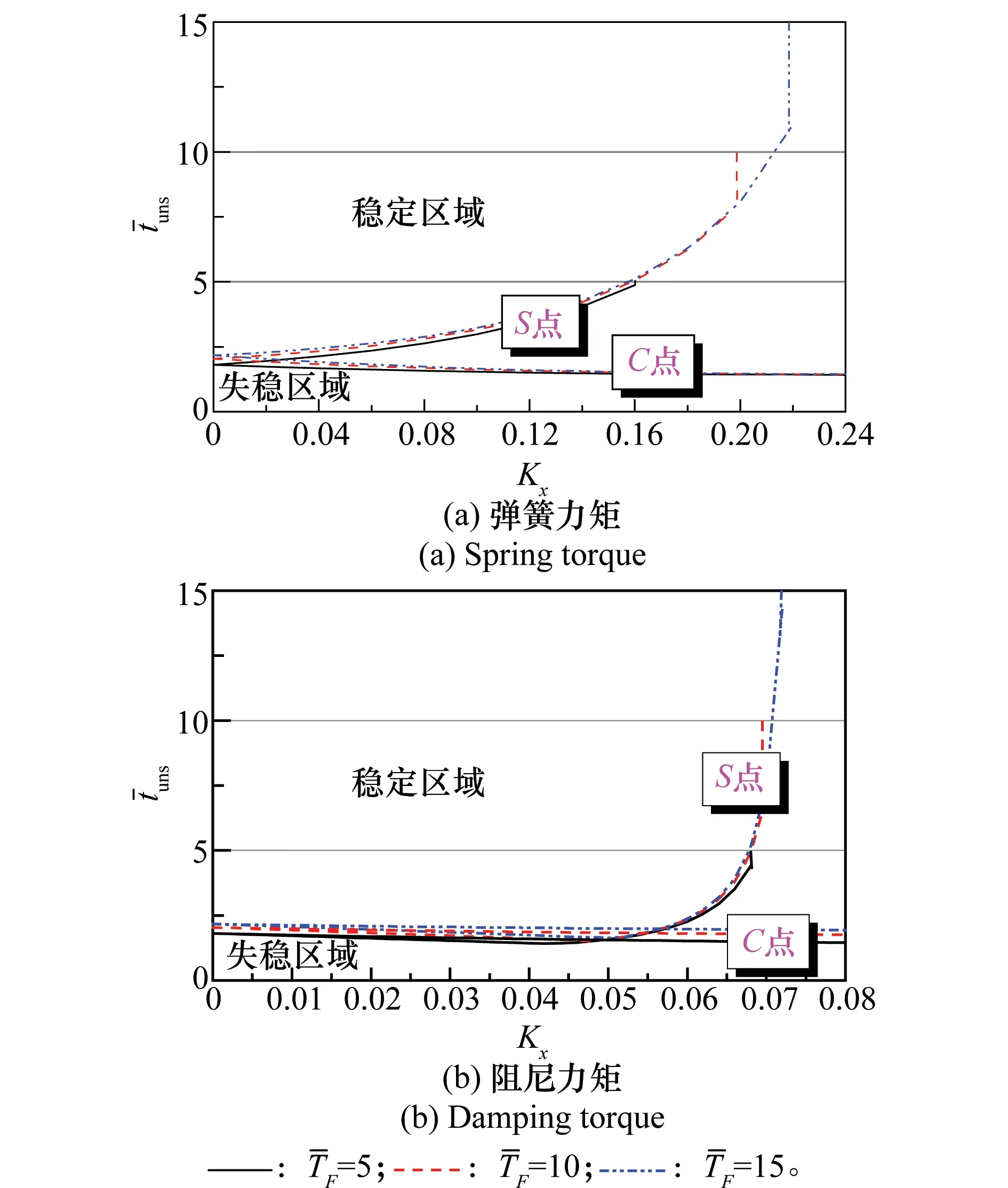
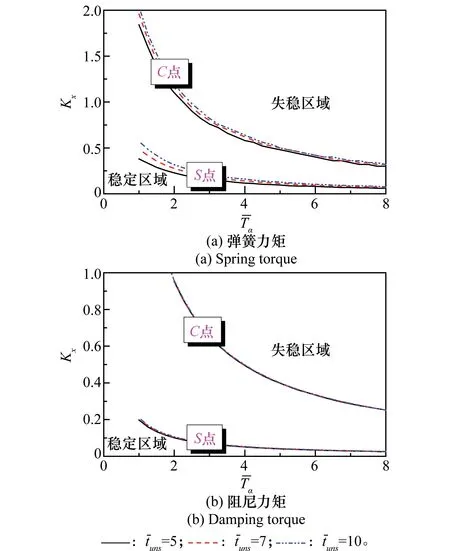
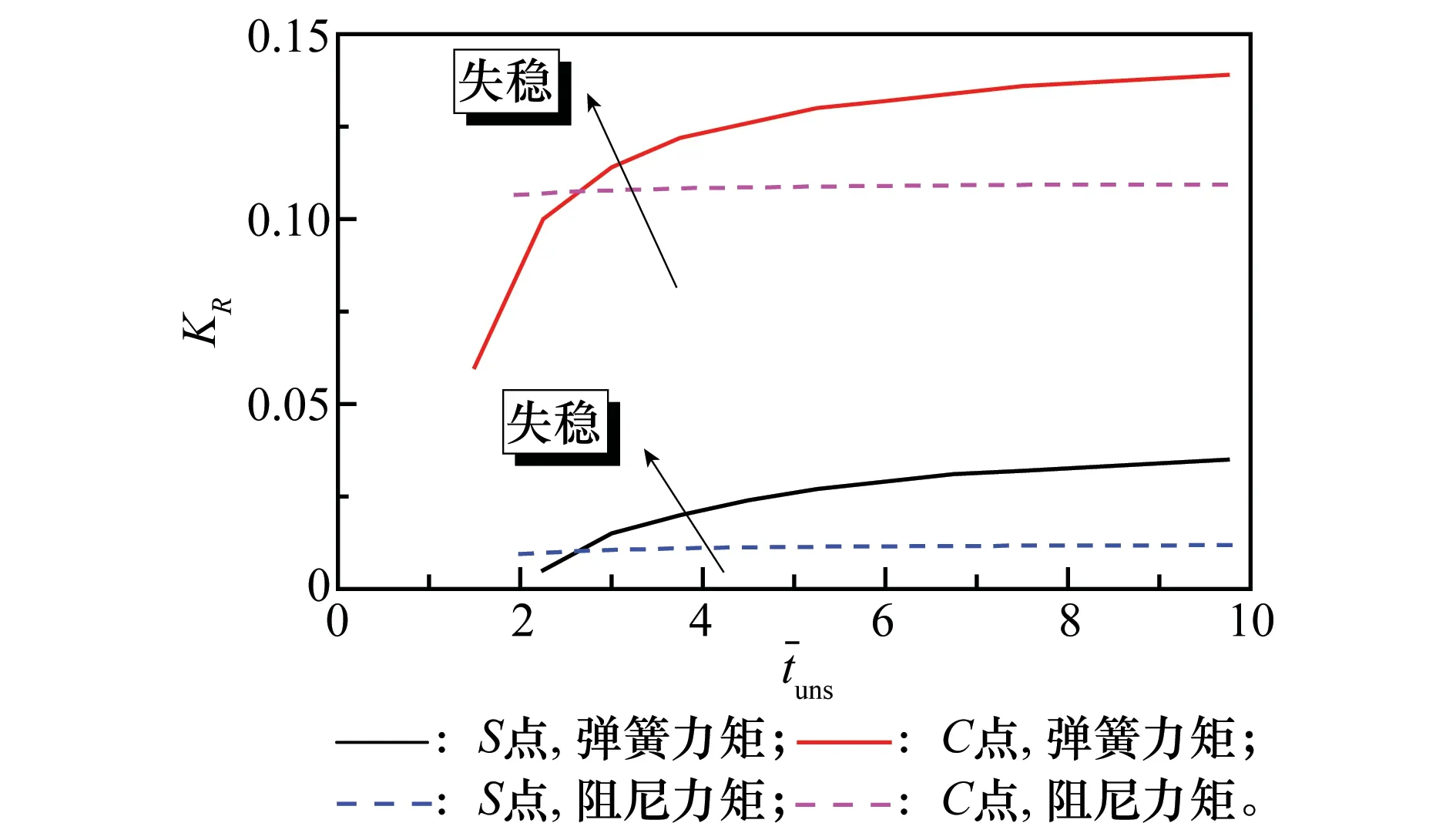
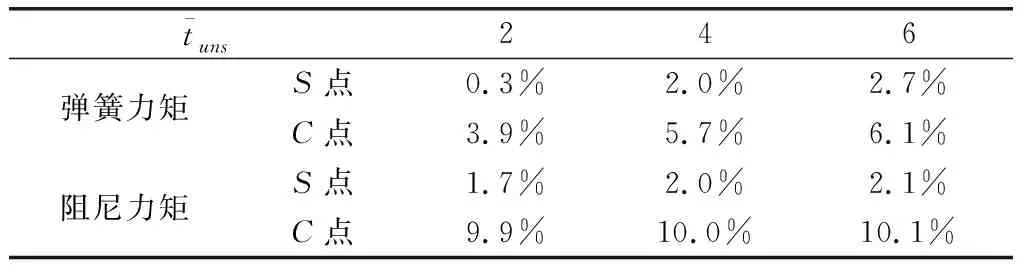
‖x(t)‖<η,?t≥t0+T(η),?‖x(t0)‖ (10) 因此,如果制導系統在某個初始時刻t0是一致漸進穩定的,則系統在定義區間內所有t0時刻均具有Lyapunov穩定性,并且系統的收斂性不會隨著t0的增大而變差。從工程觀點而言,Lyapunov意義下的穩定即為工程意義下的臨界不穩定。 分析Lyapunov穩定性的無源性方法一般不用建立狀態空間模型,也不用構造Lyapunov函數,便于工程應用,是分析時變系統穩定性的重要工具[17]。無源性方法涉及系統的無源性、正實性等性質,以下首先給出了系統無源性和正實性的判定方法。 (1) 時變無記憶函數的無源性 當系統的輸出與狀態變量無關時,可將系統表示為y=h(t,u),稱為無記憶函數。若h為標量函數,且對所有(t,u)滿足 αu2≤uh(t,u)≤βu2 (11) 時,稱h(t,u)屬于扇形[α,β],式中,α與β是實數,且β≥α。當h(t,u)屬于扇形[0,∞],即uh(t,u)≥0時,稱系統y=h(t,u)是無源的。 (2) 單入單出線性系統的嚴格正實性 單入單出線性系統G(s)是嚴格正實的,當且僅當同時滿足下列3個條件: ①G(∞)>0; ②對G(s)所有的極點,都有Re[s]<0; ③對虛軸上的點s=jω,有正實部,即Re[G(jω)]>0,?ω>0。 條件②要求G(s)極點都在左半開平面,條件③要求G(jω)的Nyquist曲線在右半平面。特別地,如果線性時不變系統傳遞函數G(s)是嚴格正實的,則G(s)狀態空間最小實現是嚴格無源性的。 定理1給出了利用無源性判定Lyapunov穩定性的方法。 定理1在圖5所示的系統中,若時不變動力學系統G(s)是嚴格無源的,時變無記憶函數h(t,u)是無源的,經反饋互聯得到的閉環系統的原點是一致漸進穩定的。 圖5 反饋互聯系統Fig.5 Interconnected system with feedback form 圖6 穩定性等價的反饋系統框圖Fig.6 Equivalent block diagrams of feedback system 將圖4所示制導系統變換為圖5所示的時不變系統與時變無記憶函數構成的反饋互聯系統,其中線性時不變系統傳遞函數為 (12) 時變無記憶函數為 (13) (14) ansn+an-1sn-1+…+a2s2+a1s1+a0=0 (15) 利用Routh穩定判據可獲得特征根都在左半開平面的約束不等式。 圖7表明,同一條件下不同隔離度模型對應的系統臨界穩定時間不同,且不論是彈簧力矩還是阻尼力矩作用下,從C點提取制導信號時系統臨界穩定時間均大于S點。由隔離度模型可知,從C點提取制導信號時,隔離度寄生回路為負反饋,從S點提取制導信號時,隔離度寄生回路為正反饋,因此在該條件下從S點提取制導信號時制導系統滿足Lyapunov一致漸進穩定性對末導時間的約束較C點嚴格,隔離度寄生回路正反饋比負反饋對制導系統穩定性的影響更大。 圖7 奈奎斯特曲線Fig.7 Nyquist curves 圖8 不同末導時間對應的穩定邊界Fig.8 Stable margins corresponding to different 由圖8可知,不同末導時間對制導系統失穩時間影響不大。干擾力矩為彈簧力矩時,從S點提取制導信號時,制導系統失穩時間隨著Kx的增大而迅速增大,并且當Kx增大到一定值時,制導系統在整個末導時間內無法滿足穩定條件,因此在制導系統不失穩的情況下,可以通過延長末導時間推遲失穩時刻;而從C點提取制導信號時,Kx對制導系統失穩時間影響不大,并且系統穩定時間大于S點。干擾力矩為阻尼力矩時,制導系統穩定邊界的變化規律與彈簧力矩時相似,只是從S點提取制導信號時,系統失穩時間隨著Kx的增大先略有減小而后迅速增大。 圖9 制導系統穩定域Fig.9 Stable margins of guidance system 導引頭隔離度會使制導系統提前失穩,并且隔離度模型不同所引起的寄生回路正負反饋情況不同,制導系統穩定時對隔離度幅值的約束也不同,而在導引頭總體設計中需要對隔離度幅值指標進行估算。本節基于制導系統滿足一致漸進穩定的條件,給出不同隔離度模型隔離度幅值指標,可以為工程師在進行導引頭隔離度總體指標設計時提供一種計算參考方法。 圖10 臨界DRRTF增益Fig.10 Critical gain of DRRTF tuns246彈簧力矩S點0.3%2.0%2.7%C點3.9%5.7%6.1%阻尼力矩S點1.7%2.0%2.1%C點9.9%10.0%10.1% GSDRR不僅與導引頭控制系統特性有關,同時也與制導信號提取點及干擾力矩類型密切相關,DRRTF模型不同,其引起的寄生回路對制導系統穩定性的影響不同。本文基于時變系統的Lyapunov穩定性理論提出了制導系統的一致漸進穩定性,利用無源性方法分析了不同導引頭隔離度模型對比例導引制導系統一致漸進穩定性的影響,研究結果表明:從S點提取制導信號時隔離度寄生回路為正反饋,制導系統滿足穩定性對末導時間及隔離度幅值指標的約束較C點嚴格;末導時間一定時,穩定飛行時間要求越長,對彈簧力矩引起的隔離度幅值指標約束相比于阻尼力矩更加嚴苛。2.2 以無源性方法表示的Lyapunov穩定性


3 制導系統穩定性分析
3.1 制導系統穩定性判定


3.2 仿真分析



4 隔離度幅值限幅計算方法


5 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45