混合型有源電力濾波器的復合電流控制策略*
2018-07-30 09:13:42田飛燕高云廣宋建成鄭麗君
電測與儀表 2018年2期
關鍵詞:系統
田飛燕,高云廣, 2,宋建成,鄭麗君
(1. 太原理工大學 礦用智能電器技術國家地方聯合工程實驗室,太原 030024; 2.太原科技大學 電子與信息工程學院,太原 030024)
0 引 言
隨著各種非線性負載的廣泛應用,大量的諧波和無功電流注入到電網中,導致各種電力設備無法正常工作,嚴重時會引起設備損壞和事故發生[1-3]。
無源濾波器(passive filter, PF)結構簡單、性價比高,在諧波抑制方面得到了廣泛的應用。其缺點有:諧振頻率依賴于元件參數、易與電網阻抗發生諧振、僅能消除諧振頻率處諧波等[4-6]。有源電力濾波器(active power filter, APF)克服了PF的這些缺點,是諧波治理技術的發展方向。但是,受電力開關器件容量和成本的限制,APF難以單獨在高壓大功率的電網上運行。為解決這一問題,將APF與PF混合使用[7-9],構成并聯混合型有源電力濾波裝置(shunt hybrid active power filter, SHAPF)。兩者結合使用,既能克服大容量APF成本高的缺陷,又能使整個系統獲得良好的濾波性能。因此,SHAPF已成為國際國內電力電子領域研究的熱點[10-12]。
APF通過控制逆變器的輸出電流來快速地跟蹤由非線性負載引起的諧波電流,實現對諧波電流的有效補償。在此過程中,要使逆變器的輸出電流快速精確地跟蹤上諧波電流的變化,關鍵在于電流跟蹤控制算法的實時性和有效性[13-14]。傳統的電流跟蹤控制方法是采用PI控制,PI控制能夠實現對直流信號的無靜差跟蹤。但是,對于APF而言,其給定的諧波電流信號是含有多次諧波的交流量,單獨PI控制無法對諧波信號實現無靜差跟蹤。
因此,本文在PI控制基礎上,結合重復控制思想,提出將PI控制與重復控制相結合的復合電流控制方法,以提高APF的補償性能,降低電網電流總諧波失真(total harmonics distortion,THD)。
1 SHAPF拓撲結構
圖1所示為SHAPF拓撲結構,其由一組5次LC調諧PF和一個小容量的APF串聯組成。非線性負載為三相二極管整流器帶阻感負載,其作用是產生6k±1次諧波電流。
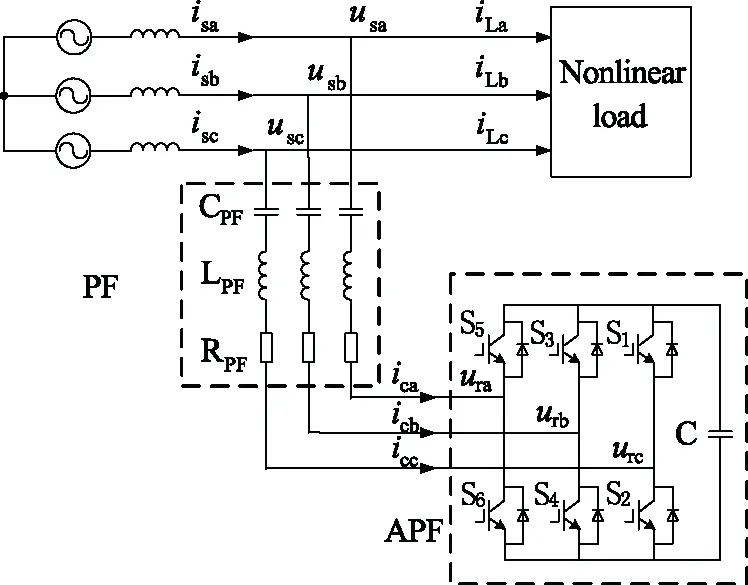
圖1 無變壓器型HAPF拓撲結構
PF工作在串聯諧振狀態,為諧波電流提供低阻抗通道。而在基波頻率處呈現高阻抗,PF承受大部分的基波電壓,從而降低APF的容量;此外,LPF能夠抑制APF產生的開關紋波,因此不再需要濾波電感,從而減小了濾波器的體積和重量,能夠在有效節約成本的同時改善濾波特性。
2 PI控制策略分析
由圖1可列寫如下電路方程:
(1)
取式(1)中的A相進行拉普拉斯變換,得到:
(2)
由式(2)得到諧波電流與APF輸出電壓的關系:
(3)
通過以上分析可知,將GP(s)作為控制對象,進行諧波電流反饋控制,即可實現諧波電流補償。為了便于編程實現,將其離散化,采用PI控制對諧波電流進行控制,電流環控制框圖如圖2所示。
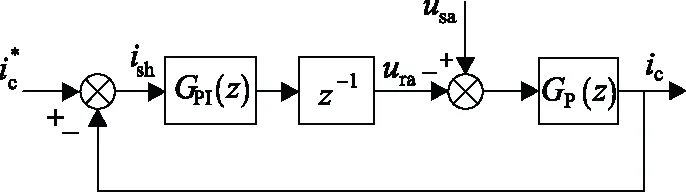
圖2 電流環控制結構框圖
由圖2可得系統的開環傳遞函數和閉環傳遞函數如式(4)、式(5)所示,其頻率特性如圖4所示。
Go(z)=GPI(z)×z-1×GP(z)
(4)
(5)
從閉環頻率特性中可看出,在0 kHz~2.5 kHz范圍內,實際補償電流與指令電流間存在很大的相位滯后。其中350 Hz,550 Hz和750 Hz頻率點附近的相位滯后在90°左右,嚴重影響了系統的補償效果。
3 重復控制器設計
針對電流PI控制補償效果不理想的問題,提出基于內模原理的重復控制策略。根據內模原理,若在穩定的閉環系統中包含輸入信號的數學模型,則可構成高精度的反饋控制系統。在APF中,給定信號在每一個基波周期諧波信號的波形都重復出現。因此,可以將基波周期作為這些諧波信號的重復周期。但是,內模需要一個基波周期才能消除擾動對輸出的影響,動態響應速度慢[15]。而PI控制器能夠快速地響應電流變化,為了使控制系統在實現較高穩態精度的同時兼具較為理想的動態性能,把電流重復控制方法和電流PI控制方法相結合。
從圖3可看到,開環頻率特性中存在諧振峰,若以其作為重復控制的控制對象,則補償器中需另外設置控制環節,以對消諧振峰,從而保證中低頻段的零增益、零相移。而在系統閉環頻率特性中,諧振峰得到了抑制。因此,選擇系統的閉環傳遞函數作為控制對象P(z)進行重復控制器的設計。
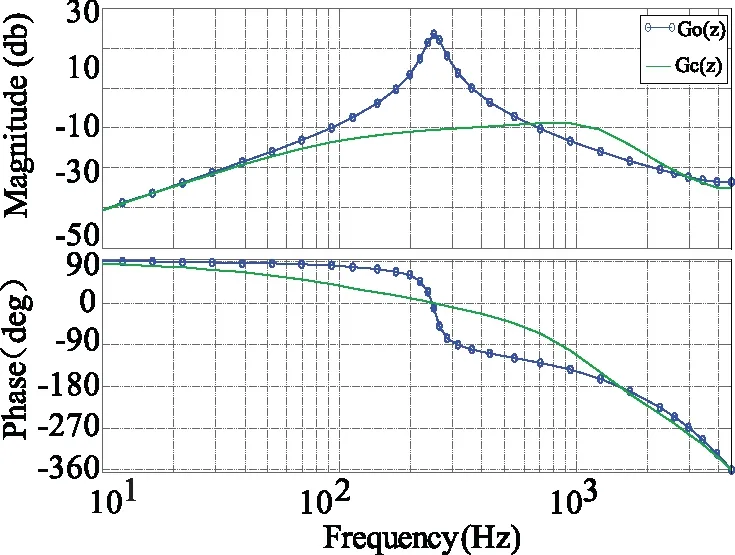
圖3 PI控制下系統開環和閉環頻率特性
根據以上分析,本文提出基于重復控制的電流雙閉環控制策略,即把重復控制作為外環,PI控制作為內環,從而構成圖4所示的電流雙閉環控制器。其中,PI控制內環用于提高系統的動態響應速度,重復控制外環用于保證系統的高穩態精度。
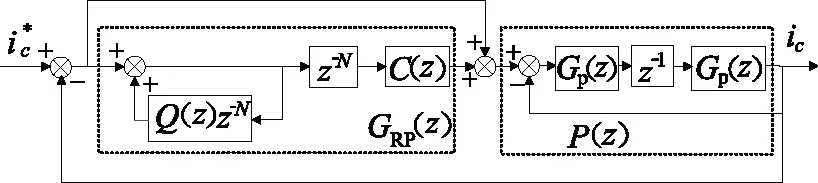
圖4 雙閉環電流控制器
圖4中,GRP(z)為重復控制器,其中Q(z)是低通濾波器或者接近于1的常數,它與z-N共同組成重復控制器的內模。前向通道中的周期延遲環節z-N將本周期的誤差信號延遲到下一個基波周期再影響控制量。若指令和擾動都是重復性的,那么z-N可將使系統下一周期的控制作用具有一定超前性。
補償器C(z)=KrzkS(z),進行相位和幅值補償,S(z)設計成二階低通濾波器以增加對高頻分量的衰減;zk是相位補償環節,k是相位補償系數,其作用是補償S(z)和控制對象在中低頻段的相位滯后;Kr是重復控制器增益,其越小系統穩定性越好,但收斂速度變慢且穩態誤差上升,本文選取Kr為0.8。
SHAPF需對50倍頻以內的諧波電流進行補償,設S(z)的轉折頻率為2 500 Hz,其離散化傳遞函數為:
(6)
控制對象:
(7)
由式(6)和式(7)可得P(z)S(z)和P(z)S(z)z3的頻率特性,如圖5所示。
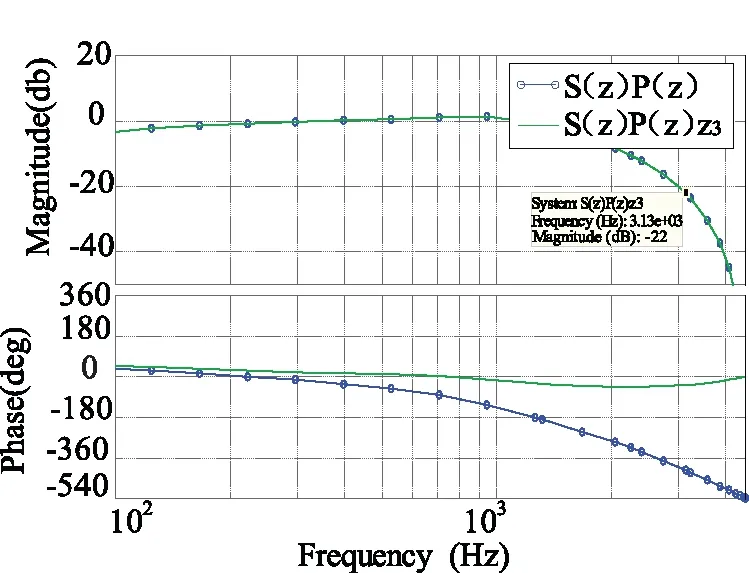
圖5 頻率特性
從圖5可看出,P(z)S(z)在高頻段得到了衰減,在3 kHz以上,幅值衰減超過20 dB。但是在整個頻段內的相位滯后非常嚴重,為了實現中低頻段內的零相移,加入純超前補償環節zk以抵消其相位滯后,從P(z)S(z)z3特性曲線可看到,z3很好地補償了P(z)S(z)在中低頻段的相位滯后。
由圖4可得電流雙閉環控制系統的閉環傳遞函數:
(8)
由式(8)可得電流雙閉環控制系統的閉環頻率特性如圖6所示。從圖6可看到,在中低頻段曲線能保持較好的零相移、零增益特性。
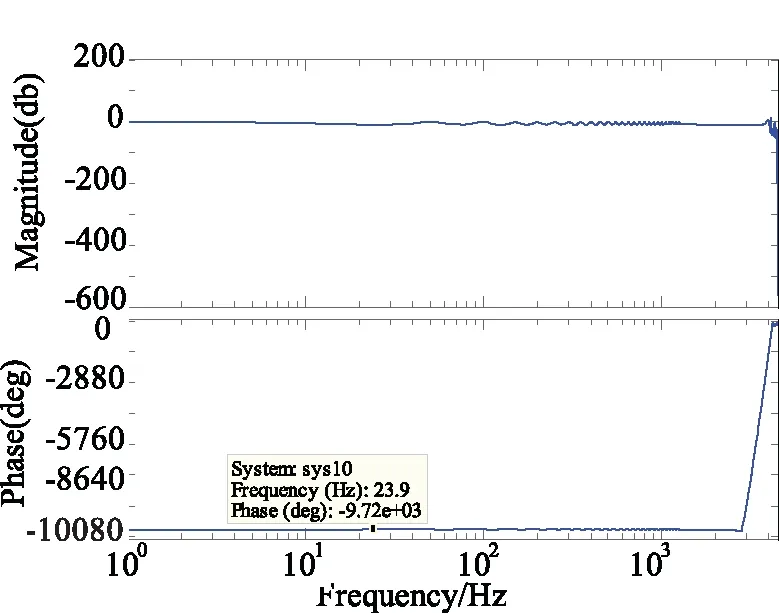
圖6 雙閉環電流控制器的閉環頻率特性
4 實驗結果
為了驗證所提控制策略的有效性,搭建了SHAPF系統實驗平臺,具體參數為:電源電壓110 V,開關頻率9 kHz,電感4 mH,電容50 μF。
圖7為補償前電源電流波形,圖8是采用PI控制補償后的電源電流波形和頻譜,圖9是采用雙閉環電流控制器補償后的電源電流波形和頻譜。
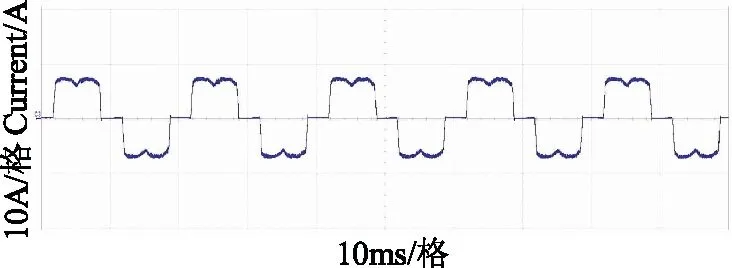
圖7 補償前電源電流波形
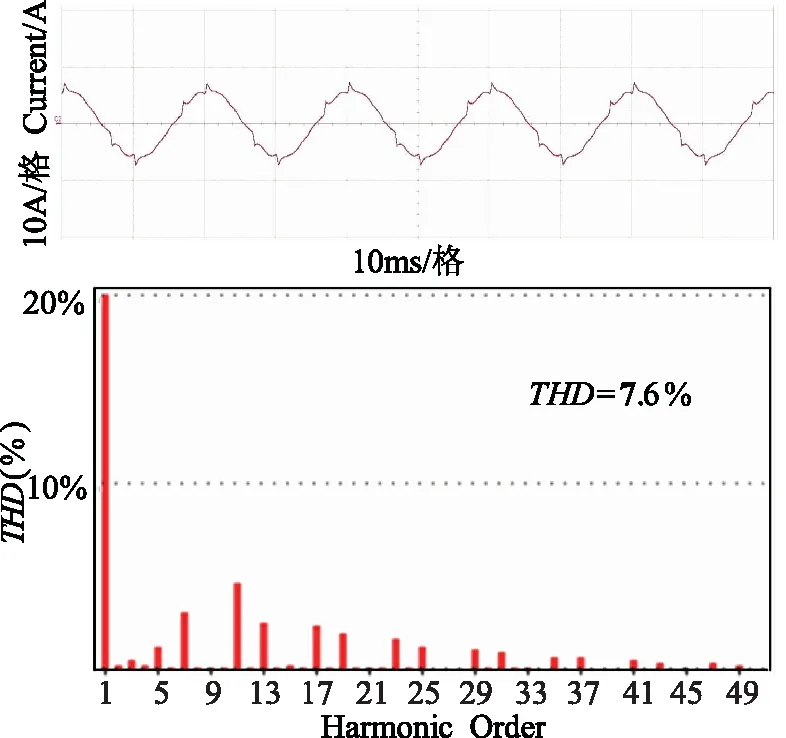
圖8 采用PI控制補償后電源電流波形和頻譜圖
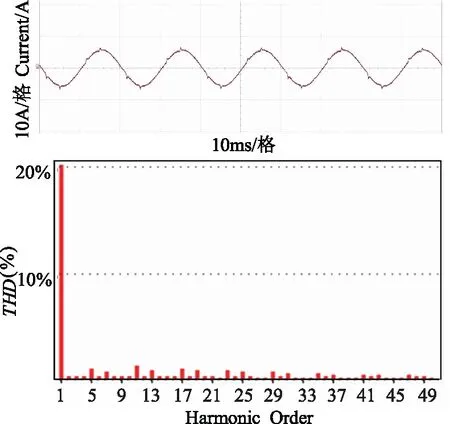
圖9 采用雙閉環電流控制器補償后波形和頻譜
圖7中可看到補償前電流波形畸變嚴重,采用PI控制進行補償后的波形如圖8所示,從圖中可看到電源電流中7、11次諧波含量仍較多,THD為7.6%,補償效果不理想。這是由于在系統穩定的前提下單獨的PI控制方法在控制諧波電流時受到帶寬范圍的限制,補償能力有限,即PI控制器無法對交流信號實現無差調節。
從圖9中可以看出,采用PI控制內環重復控制外環的雙閉環電流控制方法進行補償后,網側諧波含量有明顯的減少,補償后的電源電流THD減小到3.1%,波形接近于正弦波。這是由于采用重復控制后,重復控制器以基波周期為步長對誤差信號進行累加,通過對波形誤差進行逐周期的補償,即可達到很高的穩態精度。
5 結束語
針對非線性負載引起的諧波問題,對SHAPF結構、數學模型、控制策略和特性試驗進行了系統研究,研究結論如下:
(1)提出了基于PI控制和重復控制的雙閉環電流控制策略,有效解決了單獨采用PI控制時補償精度不高的問題,提高了系統穩態精度,實現了實時準確跟蹤補償電流的目的;
(2)設計了基于PI控制和重復控制的并聯混合型有源電力濾波器,有效抑制了由非線性負載引起的諧波電流。采用SHAPF進行補償后,電網電流波形正弦度大大提高,近似于正弦波,電流THD減小到5%以下,達到了諧波抑制的國家標準。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32