直圓型柔性鉸鏈機構變形量計算與仿真分析
2018-08-02 06:19:58楊小光尚守鋒
時代農(nóng)機 2018年5期
彭 杰,楊小光,尚守鋒
(中國電子科技集團公司第四十一研究所,安徽 蚌埠 233010)
柔性鉸鏈機構是實現(xiàn)微位移技術的關鍵機構,由于其體積小、無間隙、無機械摩擦、運動平滑、精度高,被廣泛應用于微動機器人、陀螺儀、加速度計、精密天平等儀器設備中。對柔性鉸鏈機構的變形量進行計算是設計這些精密儀器設備的基礎。本文只對直圓型柔性鉸鏈機構的變形量進行理論計算與仿真分析。
1 理論計算
1.1 單個鉸鏈的轉動剛度計算
直圓型柔性鉸鏈的幾何結構見圖1,圖中t為柔性鉸鏈的最小厚度,R為柔性鉸鏈的切割半徑,b為柔性鉸鏈的寬度,h為柔性鉸鏈的高度。
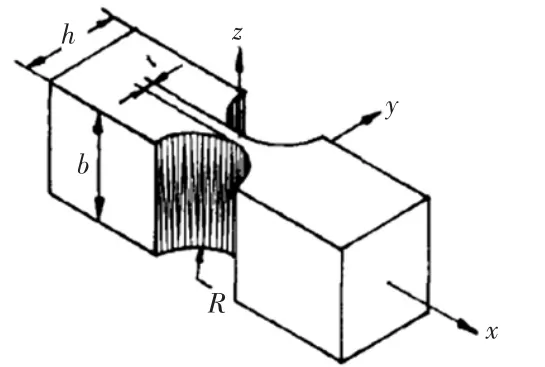
圖1 直圓型柔性鉸鏈示意圖
柔性鉸鏈的中部尺寸較小,結構較為脆弱,能夠在力矩的作用下產(chǎn)生較大的角變形。為了便于分析,在圓心角θ處取微元對其進行受力分析,如圖2所示。
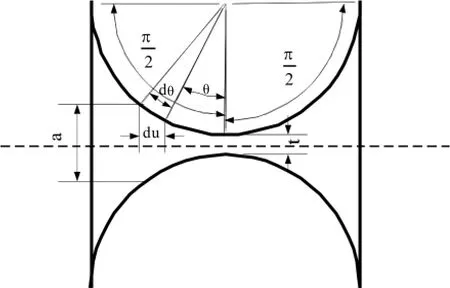
圖2 微元體劃分示意圖
微元體的高度:a=t+2R(1-cosθ)
微元體的厚度:du=d(Rsinθ)=Rcosθdθ
由于柔性鉸鏈切口尺寸較結構的其他尺寸小的多,可以認為彎矩變化很小;此外,由于柔性鉸鏈的變形很小,撓曲線非常平坦,根據(jù)材料力學,可得出以下公式:
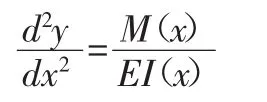
式中,E為材料的彈性模量,M(x)為作用于微小段dx的彎矩,I(x)為微小段dx的截面對中心的慣性矩。
則柔性鉸鏈的轉角:

則有轉動剛度:
其中中間變量f1計算如下:
具體的參數(shù)如下:彈性模量E=200GPa,最小厚度t=0.4mm,切割半徑R=2mm,寬度b=4mm。通過matlab編程計算,f1=64.1665。
計算得出,柔性鉸鏈的轉動剛度kz=4.1559Nm/rad。
1.2 鉸鏈機構的等效剛度計算
只考慮柔性鉸鏈的彎曲變形,把柔性鉸鏈視為理想的轉動副,根據(jù)能量守恒求解其等效剛度。根據(jù)參考文獻2,可知單平行四桿鉸鏈機構的等效剛度
式中,d為柔性鉸鏈機構的曲柄長度。
具體參數(shù)為:曲柄長度d=18mm。
計算得出柔性鉸鏈機構的等效剛度keq=5.13×104N/m。
1.3 鉸鏈機構的變形計算
2 有限元仿真分析
根據(jù)上述參數(shù),首先在Pro/E三維繪圖軟件中對柔性鉸鏈機構進行三維建模,保存為stp格式后,導入ANSYS Workbench軟件中。模型的加載條件為:底面施加固定約束條件,受力面施加1N力的約束。對模型加載后,求解得出柔性鉸鏈機構的變形圖如圖3所示。
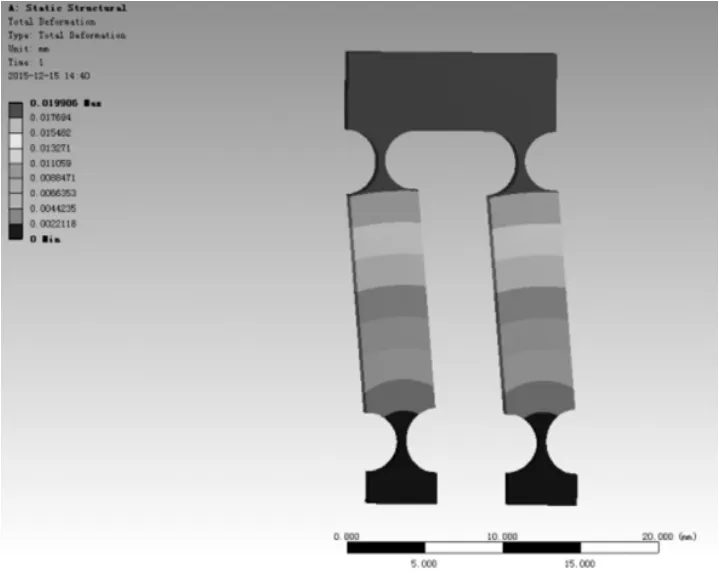
圖3 柔性鉸鏈機構的變形圖
從圖2可看出,柔性鉸鏈機構的變形量從底部到上部依次增加,上部變形量19.9 μm,與理論計算結果19.49μm的誤差為2.06%,本文的理論計算方法是行之有效的。
3 結語
對直圓型柔性鉸鏈機構的變形量進行了理論計算與仿真分析得出:(1)柔性鉸鏈機構的變形量從底部到上部依次增加;(2)理論計算結果與有限元仿真結果誤差為2.06%,證明本文的理論計算方法是行之有效的。
此外,本文在計算柔性鉸鏈機構的等效剛度時,只考慮了柔性鉸鏈的彎曲變形,未考慮拉伸變形,如需得出更加精確的結果還需要考慮拉伸變形的影響。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24